Материал: Osnovy_teorii_tsepey_post_i_perem_toka_2012
|
ri L di |
u. |
|
(3.24) |
|
|
dt |
|
|
|
|
а i |
|
а |
i |
|
|
u r |
r |
|
u r |
r |
|
u |
с |
u |
uC |
с |
|
L |
C |
||||
uL |
|
|
|||
|
|
|
b
 b
b
а б
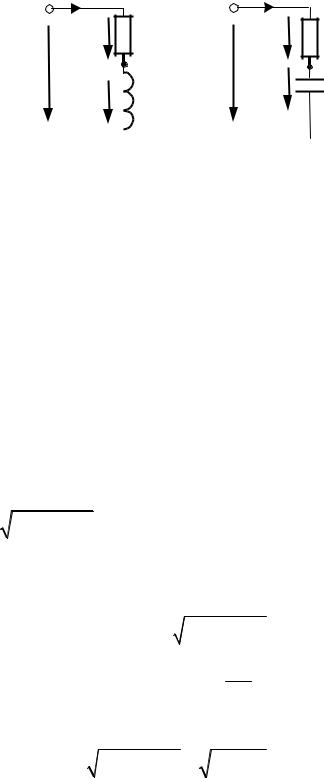
Рис. 3.7. Двухэлементные схемы:
а – активно-индуктивная; б – активно-емкостная
Как и ранее, осуществляем подстановку соотношений (3.4) в полученное уравнение:
rIm sin( t ) L |
d |
Im sin( t ) Um sin( t ). |
(3.25) |
|
dt |
||||
|
|
|
Преобразуем уравнение (3.25) с использованием известных математических
приемов:
Im r sin( t ) L cos( t ) Um sin( t ) ;
Im r |
2 |
( L) |
2 |
|
t arctg |
L |
Um sin( t ). |
|
|
|
sin |
|
|
||||
|
|
r |
||||||
|
|
|
|
|
|
|
|
|
На основе полученного результата формируем равенства:
Um Im r2 ( L)2 ;
arctg rL .
Величина
(3.26)
(3.27)
(3.28)
(3.29)
r2 ( L)2 |
|
r2 xL2 |
z |
(3.30) |
называется полным сопротивлением.
65

Полное сопротивление содержит в своем составе активное сопротивление r, которое отличается по величине от сопротивления, измеренного на постоянном токе, в силу проявленияявления поверхностного эффекта.
Суть поверхностного эффекта состоит в следующем. Плотность переменного тока по сечению проводника распределяется неравномерно. Максимальные значенияплотности тока имеют место у поверхности проводника, минимальные – на оси проводника. Вследствие этого сопротивление проводника увеличивается по сравнению со случаем постоянного тока. Проявление поверхностного эффекта тем больше, чем больше частота тока. При 50 Гц такое проявление незначительно, т. е. сопротивления, измеренные при нулевой частоте (постоянный ток) и при частоте50 Гц, отличаются друг от друга незначительно.
Входящее в состав полного сопротивления z индуктивное сопротивление хL = ωL относится к разряду реактивных сопротивлений. В отличие от активного сопротивления r, которое связано с потерями электрической энергии, реактивное сопротивление xL определяется обратимыми процессами преобразования энергии магнитного поля, которыене сопровождаются потерями электрической энергии.
С учетом уравнения (3.29) угол сдвига фаз в этом случае рассчитывается по формуле:
arctg |
xL |
arctg |
x L |
. |
(3.31) |
r |
|
||||
|
|
r |
|
||
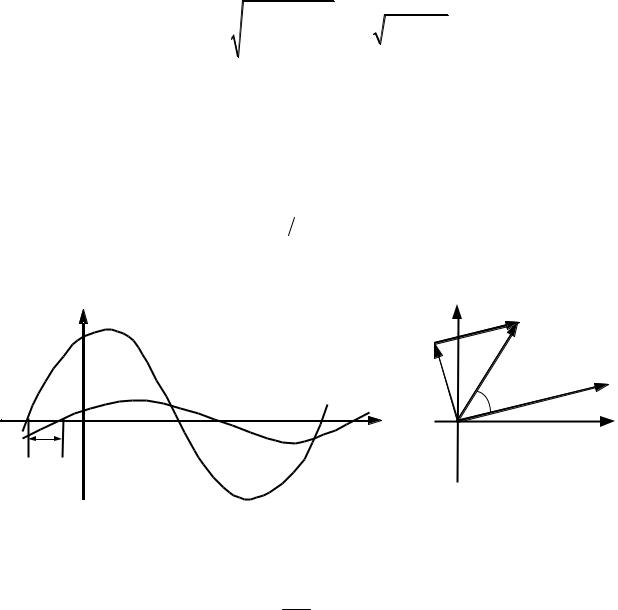
В зависимости от соотношения между xL и r угол сдвига фаз может принимать любое значение между нулем и  2 . В предельных случаях цепь становится чисто активной (L = 0) или чисто реактивной (r = 0). На рис. 3.8, а изображена временная диаграмма для случая r = xL ( 45 ). Ей соответствует векторная диаграмма, представленная нарис. 3.8, б.
2 . В предельных случаях цепь становится чисто активной (L = 0) или чисто реактивной (r = 0). На рис. 3.8, а изображена временная диаграмма для случая r = xL ( 45 ). Ей соответствует векторная диаграмма, представленная нарис. 3.8, б.
Особенности построения векторной диаграммы: поскольку имеет место последовательное соединение элементов r и L, то вектор тока Im отложен как исходный; относительно тока отложены векторы падений напряжений xLIm и rIm ; геометрическим сложением получен вектор входного напряжения Um . Масштабы
напряжения и токавыбраны независимыми друг от друга.
Аналогичные преобразования для активно-емкостной цепи r, C (см. рис. 3.7, б) привели бы к следующему результату:
66
U |
|
I |
|
r2 |
1 2 |
I |
|
r2 x 2 |
; |
(3.32) |
|||
m |
m |
|
|
m |
|||||||||
|
|
|
|
|
|
C |
|
|
|||||
|
|
|
|
|
C |
|
|
|
|
|
|
||
|
|
|
|
arctg |
|
xC |
; |
|
(3.33) |
||||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
arctg |
xC |
. |
|
|
(3.34) |
||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
Угол сдвига фаз в данном случае отрицателен и может принимать любое |
|||||||||||||
значение в диапазоне от нуля до 2 . Следовательно, |
при любых соотноше- |
||||||||||||
ниях между r и xC входное напряжение цепи отстает по фазе от тока.
|
|
y |
__ |
|
|
u, i |
|
r Im |
a |
|
|
|
c |
|
|||
u |
|
|
_ |
|
|
|
|
_ |
|
Um |
|
|
i |
xL Im |
45º |
_ |
|
|
|
Im |
|||
|
|
|
|
||
0 |
ωt |
0 b |
|
|
x |
φ = 45° |
|
|
|
|
|
|
а |
|
|
б |
|
Рис. 3.8. Напряжение и ток в цепи с r и L
Емкостное сопротивление xC 1C так же, как и индуктивное, относится к
разряду реактивных сопротивлений, поскольку значение этого сопротивления обусловливаетсяобратимымипроцессамиизмененияэнергииэлектрическогополя.
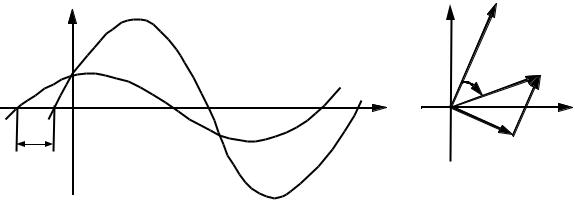
На рис. 3.9, а приведена временная диаграмма для случая r = xС,45 . Этой диаграмме соответствует векторная диаграмма на рис. 3.9, б.
Выявленные фазовые соотношения между напряжением и током в индуктивности и емкости обусловлены разной физической природой магнитного и электрического полей, что находит выражение в следующих парах соотношений:
67
для индуктивности – |
|
|
|
|
|
|
u |
L diL ; |
|
||||
L |
|
|
|
|
dt |
(3.35) |
|
|
1 |
|
|
||
iL |
uLdt; |
|
||||
|
|
|
||||
|
|
L |
|
|
||
|
|
|
|
|||
для емкости – |
|
|
|
|
|
|
i |
C duC ; |
|
||||
C |
|
|
|
|
dt |
(3.36) |
|
|
1 |
|
|||
uC |
iC dt. |
|
||||
|
|
|
|
|||
|
|
|
C |
|
|
|
|
|
|
|
|
||
|
|
|
y |
|
__ |
|
u, i |
u |
|
|
Im |
|
|
|
|
|
|
_ |
|
|
|
|
|
|
|
|
|
|
|
|
|
φ |
Um a |
|
|
|
|
b |
_ |
|
_ |
|
i |
ωt |
c |
r Im x |
||
φ |
|
|
xC Im |
|
||
|
|
|
|
|
|
|
|
а |
|
|
|
б |
|
|
Рис. 3.9. Напряжение и ток в цепи с r и С |
|
|
|
||
Интегральной величиной в случае индуктивности является ток, а в емкости – напряжение. Именно эти величины являются запаздывающими по фазе при любых изменениях напряжений и токов во времени.
При исследовании любых цепей синусоидального тока используются установленные понятия – сопротивления r – активное, xL и xC – реактивные, z – полное.
3.3. Основы комплексного (символического) метода расчета электрических цепей синусоидального тока
Используемые в подразд. 3.2 соотношения для вычисления мгновенных значений напряжений и токов неудобны для расчета сложных цепей, так как приводят к громоздким выражениям, требующим значительного объема преоб-
68
разований и вычислений. Существенное упрощение расчетов достигается переходом к комплексным числам и соотношениям в комплексной форме.
Любое комплексное число, как известно, можно представить в различных формах:
|
|
|
b |
|
|
a jb a2 |
b2 e jarctg a Ae j Acos jAsin , |
(3.37) |
|
где A |
a2 b2 ; arctg b |
; j |
1 . |
|
|
a |
|
|
|
В основу дальнейших рассуждений положим равенство |
|
|||
|
|
Acos jAsin Ae j , |
(3.38) |
|
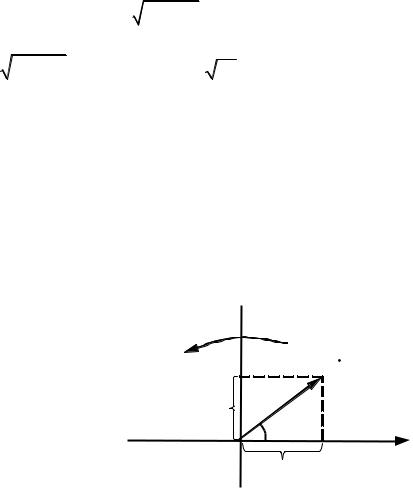
которое может быть применено для определения комплексных функций времени. На рис. 3.10 изображен вектор, вращающийся с угловой скоростью ω на
комплексной плоскости.
j
|
ω |
|
|
Am |
|
j Am sin(ωt + γ) |
|
|
|
γ |
|
0 |
Am cos(ωt + γ) |
1 |
|
||
|
|
Рис. 3.10. Вращающийся вектор на комплексной плоскости
Проекции вращающегося вектора на оси действительных и мнимых значений представляют собой гармонические функции, поэтому можно записать:
A cos t jA |
sin t A |
|
e j t |
(3.39) |
|||
m |
m |
m |
|
|
|
|
|
или |
|
|
|
|
|
|
|
|
|
|
|
j t |
, |
(3.40) |
|
Am cos t jAm sin t Ame |
|
||||||
где |
|
|
|
|
|
|
|
A |
A e j . |
|
|
|
|
(3.41) |
|
m |
|
m |
|
|
|
|
|
69