Материал: Chast1giper
Розв’язок в неінерціальній системі спостерігачем СI.
В
його неінерціальній системі тіло
знаходиться у стані спокою. Умова
рівноваги має вид
![]() .
Величина сили інерції
.
Величина сили інерції
![]() ,
а її напрямок уже врахований в попередньому
рівнянні. Маємо
,
а її напрямок уже врахований в попередньому
рівнянні. Маємо
![]() таку ж відповідь.
таку ж відповідь.
В
системах, що обертаються, завжди виникає
нормальне (доцентрове) прискорення
![]() .
Тому виникає сила інерції, направлена
проти цього прискорення, тобто від
центра кривизни. Ця сила інерції
називається відцентровою (Fв.ц.)
і дорівнює, як і в поступальних системах
.
Тому виникає сила інерції, направлена
проти цього прискорення, тобто від
центра кривизни. Ця сила інерції
називається відцентровою (Fв.ц.)
і дорівнює, як і в поступальних системах
![]() .
(3.21)
.
(3.21)
![]()
![]() Наряду
з цією силою інерції в обертальних
системах виникає іще одна сила інерції
– коріолісова сила, названа в честь
французького фізика Г.Г.Коріоліса (1792-1843),
який вперше її одержав теоретично. Вона
виникає тоді, коли відносна швидкість
тіла відмінна від нуля. З
Наряду
з цією силою інерції в обертальних
системах виникає іще одна сила інерції
– коріолісова сила, названа в честь
французького фізика Г.Г.Коріоліса (1792-1843),
який вперше її одержав теоретично. Вона
виникає тоді, коли відносна швидкість
тіла відмінна від нуля. З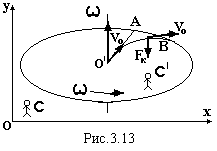 ’ясуємо
напрямок цієї сили. Нехай в системі, яка
обертається з кутовою швидкістю ω,
вздовж радіуса без тертя рухається куля
з відносною швидкістю Vo
(рис.3.13). В
інерціальній системі спостерігач С
буде бачити рух кулі по прямій ОА. Диск
же обертається, не впливаючи на рух кулі
із-за відсутності тертя. Спостерігач
СI
буде бачити рух кулі по дузі ОВ. Тому
він робить правомірний висновок, що на
кулю діє сила Fk
перпендикулярна до швидкості, яка і
змінює її напрямок. Це і є сила інерції
Коріоліса. Вона перпендикулярна до
векторів ω і Vo
і дорівнює
’ясуємо
напрямок цієї сили. Нехай в системі, яка
обертається з кутовою швидкістю ω,
вздовж радіуса без тертя рухається куля
з відносною швидкістю Vo
(рис.3.13). В
інерціальній системі спостерігач С
буде бачити рух кулі по прямій ОА. Диск
же обертається, не впливаючи на рух кулі
із-за відсутності тертя. Спостерігач
СI
буде бачити рух кулі по дузі ОВ. Тому
він робить правомірний висновок, що на
кулю діє сила Fk
перпендикулярна до швидкості, яка і
змінює її напрямок. Це і є сила інерції
Коріоліса. Вона перпендикулярна до
векторів ω і Vo
і дорівнює
![]() .
(3.22)
.
(3.22)
Таким чином, другий закон Ньютона записується в самому загальному випадку неінерціальних систем так:
 .
(3.23)
.
(3.23)
4. Робота. Енергія. Імпульс. Закони збереження
4.1 Імпульс тіла. Імпульс системи тіл. Центр інерції системи . Закон збереження імпульсу
 Імпульсом
Імпульсом
![]() тіла
називається вектор, величина якого
дорівнює добутку маси тіла на його
швидкість. Напрямок вектора імпульсу
співпадає з вектором швидкості
тіла
називається вектор, величина якого
дорівнює добутку маси тіла на його
швидкість. Напрямок вектора імпульсу
співпадає з вектором швидкості
![]() .
(4.1)
.
(4.1)
![]() Імпульс
системи тіл (
Імпульс
системи тіл (![]() )
– це векторна сума імпульсів тіл цієї
системи
)
– це векторна сума імпульсів тіл цієї
системи ![]() .
(4.2)
.
(4.2)
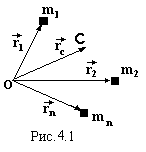
Імпульс
системи тіл можна знайти, ввівши поняття
центра мас системи (рис.4.1) Радіус-вектор
![]() центра мас визначається рівнянням:
центра мас визначається рівнянням:
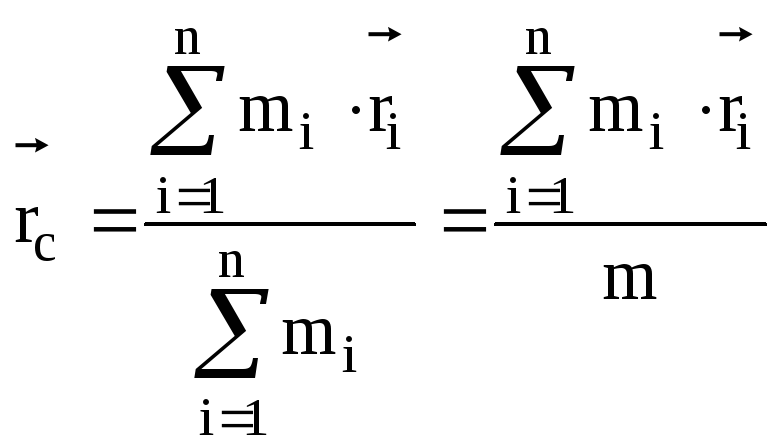
![]() (4.3)
(4.3)
Взявши похідну за часом, одержимо
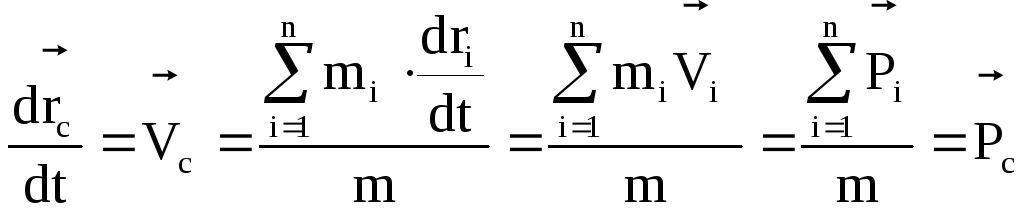 ,
,
звідки
маємо, що імпульс системи тіл дорівнює
добутку маси системи на швидкість руху
її центра мас
![]() .
.
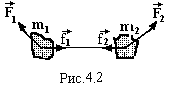 Нехай
два тіла m1
і m2
взаємодіють з силами і.
Нехай
два тіла m1
і m2
взаємодіють з силами і.
![]() На них діють зовнішні сили
На них діють зовнішні сили
![]() і
і
![]() (рис.4.2). Позначимо
(рис.4.2). Позначимо
![]()
![]() і
і
![]() - швидкості
тіл в момент часу t,
- швидкості
тіл в момент часу t,
![]() і
і
![]() - швидкості
в момент часу t+dt.
Запишемо другий закон Ньютона для
кожного тіла
- швидкості
в момент часу t+dt.
Запишемо другий закон Ньютона для
кожного тіла
Додаємо ці рівняння
![]() .
(4.4)
.
(4.4)
По
третьому закону Ньютона
![]() як внутрішні сили.
як внутрішні сили.
Якщо
векторна сума зовнішніх сил дорівнює
нулю
![]() ,
система називається ізольованою, або
замкнутою. Для такої системи із (4.4)
одержуємо
,
система називається ізольованою, або
замкнутою. Для такої системи із (4.4)
одержуємо
![]() ,
тобто векторна
сума імпульсів замкнутої системи
залишається незмінною. Це є закон
збереження імпульсу. Якщо ж система не
замкнута, то її імпульс змінюється на
величину імпульсу зовнішніх сил
,
тобто векторна
сума імпульсів замкнутої системи
залишається незмінною. Це є закон
збереження імпульсу. Якщо ж система не
замкнута, то її імпульс змінюється на
величину імпульсу зовнішніх сил
![]() .
.
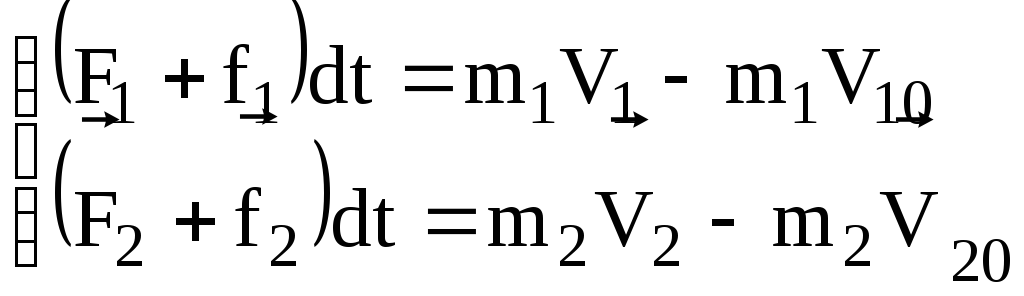
4.2 Принцип реактивного руху. Рівняння і.В.Мещерського і к.Е.Ціолковського
В основі реактивного руху лежить закон збереження імпульсу. Від тіла з певною швидкістю відокремлюється деяка маса. У відповідності із законом збереження імпульсу, швидкість руху тіла теж буде змінюватись, тобто це рух тіла змінної маси. Типовим прикладом реактивного руху є рух ракети. Продукти згорання палива викидаються через сопло ракети, тоді її корпус рухається в протилежному напрямку (рис.4.3).
Знайдемо рівняння, яке описує рух ракети, та швидкість її руху. Введемо позначення:
m – маса ракети в момент часу t;
![]()
 -
миттєва
швидкість корпусу ракети відносно
вибраної системи координат x,y,z;
-
миттєва
швидкість корпусу ракети відносно
вибраної системи координат x,y,z;
![]() -
швидкість
продуктів згорання палива віднос-но
цієї ж системи координат x,y,z;
-
швидкість
продуктів згорання палива віднос-но
цієї ж системи координат x,y,z;
![]() -
зміна швидкості корпусу ракети;
-
зміна швидкості корпусу ракети;
dm – маса викинутих за час dt продуктів згорання;
![]() -
рівнодіюча зовнішніх сил.
-
рівнодіюча зовнішніх сил.
З![]() апишемо
другий закон Ньютона: імпульс сили
апишемо
другий закон Ньютона: імпульс сили
![]() дорівнює зміні імпульсу системи
„ракета-продукти згорання”
дорівнює зміні імпульсу системи
„ракета-продукти згорання”
![]()
![]()
Нехтуючи
доданком
![]() ,
який набагато менший, ніж інші, так як
є добуток двох нескінченно малих величин,
одержуємо
,
який набагато менший, ніж інші, так як
є добуток двох нескінченно малих величин,
одержуємо
![]() .
Векторна сума
.
Векторна сума
![]() дає швидкість
дає швидкість![]() витоку газів відносно корпусу ракети.
Її величина залишається незмінною, так
як вона визначається конструкцією сопла
реактивного двигуна. Рівняння
витоку газів відносно корпусу ракети.
Її величина залишається незмінною, так
як вона визначається конструкцією сопла
реактивного двигуна. Рівняння
![]() (4.5)
(4.5)
називається
рівнянням І.В.Мещерського (російський
вчений, 1859-1935). Другий доданок в рівнянні
(4.5) має розмірність сили і називається
реактивною силою, яка виникає за рахунок
зміни маси тіла з часом
![]() .
.
К.Е.Ціолковський
(російський вчений, 1857-1935) розв’язав
рівняння (4.5) Мещерського для випадку
відсутності зовнішніх сил
![]() з початковими умовами: при t
= 0 V
= 0, m
= mo
–стартова маса ракети. В скалярній
формі рівняння (4.5) в проекції на
вертикальну вісь z має вид
з початковими умовами: при t
= 0 V
= 0, m
= mo
–стартова маса ракети. В скалярній
формі рівняння (4.5) в проекції на
вертикальну вісь z має вид
![]() .
Інтегрування дає
.
Інтегрування дає ![]() . (4.6)
. (4.6)
Це рівняння К.Е.Ціолковського. Воно показує, що кінцева швидкість ракети пропорційна відносній швидкості витоку газів і тим більша, чим більше відношення стартової маси mo до кінцевої маси m. Щоб збільшити це відношення, Ціолковський запропонував багатоступеневі реактивні двигуни. Конструктивно неможливо виготовити легкий корпус двигуна, заправивши в нього велику масу палива. Модульний же корпус дає можливість збільшити відношення mo/m, а значить і кінцеву швидкість ракети.
4.3 Механічна робота. Потужність
![]() Поняття
механічної роботи пов’язане з
переміщенням. Якщо під дією сили
Поняття
механічної роботи пов’язане з
переміщенням. Якщо під дією сили
![]() тіло переміщується на відстань
тіло переміщується на відстань
![]() (рис.4.4), то елементарна механічна робота
(рис.4.4), то елементарна механічна робота
![]() (4.7)
(4.7)
д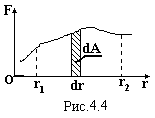
![]() орівнює
скалярному добутку сили на переміщення.
На графіку залежності сили від переміщення
(рис.4.5) вона відповідає площі заштрихованої
області. Вся робота змінної сили
знаходиться як інтеграл
орівнює
скалярному добутку сили на переміщення.
На графіку залежності сили від переміщення
(рис.4.5) вона відповідає площі заштрихованої
області. Вся робота змінної сили
знаходиться як інтеграл
 (4.8)
(4.8)
і чисельно дорівнює площі, обмеженій лініями r1, r2, віссю Or абсцис і кривою F(r). Вимірюється робота в джоулях [A]=H∙м = Дж.
Потужність – це швидкість виконання роботи, тобто це робота, виконана за одиницю часу
![]() (4.9)
(4.9)
і дорівнює скалярному добутку сили і швидкості. Потужність вимірюється у ватах [P] = Дж/с = вт. Позасистемною одиницею потужності є кінська сила 1к.с. = 735 вт.
4.4 Поняття про енергію. Кінетична та потенціальна енергії
Фізична величина, яка характеризує здатність тіла виконувати роботу, називається енергією і вимірюється тією роботою, яку може виконати тіло. До механічної енергії відносяться два види енергії у відповідності з тим, за рахунок чого може бути виконана робота: - кінетична енергія, коли робота виконується за рахунок руху тіла; - потенціальна енергія, коли робота може бути виконана за рахунок положення тіл, або взаємного положення частин тіла (за рахунок деформації). Вимірюється енергія в одиницях роботи, в Дж.
Знайдемо вираз для кінетичної енергії, яка дорівнює роботі тіла за рахунок руху до зупинки. Враховуючи (3,3), одержуємо
![]() (4.10)Знак
(-) мінус показує, що кінетична енергія
(4.10)Знак
(-) мінус показує, що кінетична енергія
![]() (4.11) при виконанні роботи зменшується.
Звертає на себе увагу, що кінетична
енергія не може бути від’ємною, тобто
Ек
≥
0.
(4.11) при виконанні роботи зменшується.
Звертає на себе увагу, що кінетична
енергія не може бути від’ємною, тобто
Ек
≥
0.
 Потенціальна
енергія
(енергія положення) вимірюється роботою,
яку необхідно виконати зовнішнім силам,
щоб перевести систему без зміни її
кінетичної енергії із одного стану в
інший.
Потенціальна
енергія
(енергія положення) вимірюється роботою,
яку необхідно виконати зовнішнім силам,
щоб перевести систему без зміни її
кінетичної енергії із одного стану в
інший.
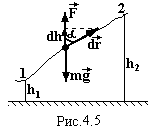
![]() Знайдемо
потенціальну енергію тіла масою m
в
гравітаційному полі тяжіння Землі.
Початкове і кінцеве положення тіла
будемо задавати його висотами h1
і
h2
над поверхнею Землі (рис.4.6). Для переміщення
тіла без зміни його кінетичної енергії
( без зміни швидкості), тобто для
рівномірного переміщення із положення
1 в положення 2, до нього, у відповідності
з першим законом Ньютона, необхідно
прикласти силу
Знайдемо
потенціальну енергію тіла масою m
в
гравітаційному полі тяжіння Землі.
Початкове і кінцеве положення тіла
будемо задавати його висотами h1
і
h2
над поверхнею Землі (рис.4.6). Для переміщення
тіла без зміни його кінетичної енергії
( без зміни швидкості), тобто для
рівномірного переміщення із положення
1 в положення 2, до нього, у відповідності
з першим законом Ньютона, необхідно
прикласти силу
![]() .
Робота цієї сили
.
Робота цієї сили