Материал: Chast1giper
т![]() обто
це перша похідна від вектора швидкості,
або друга похідна від радіус-вектора
за часом. Прискорення – це швидкість
зміни швидкості. Одиницею вимірювання
при- скорення є м/с2.
обто
це перша похідна від вектора швидкості,
або друга похідна від радіус-вектора
за часом. Прискорення – це швидкість
зміни швидкості. Одиницею вимірювання
при- скорення є м/с2.
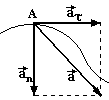
Нехай
тіло за час ∆t
перемістилось
із т.А в т.В (рис.2.2). Вектор зміни швидкості
![]() розкладемо на дві складові
розкладемо на дві складові
![]() так, щоб величина
так, щоб величина
![]() =DE.
Із рис.2.2 видно, що
=DE.
Із рис.2.2 видно, що
![]() ,
причому
,
причому
![]() відображає зміну напрямку швидкості,
а
відображає зміну напрямку швидкості,
а
![]() зміну її модуля. Таким чином, прискорення
зміну її модуля. Таким чином, прискорення
![]() (2.6)
(2.6)
теж
буде мати дві складові: нормальне
прискорення
![]() і тангенціальне (дотичне)
і тангенціальне (дотичне)
![]() .
.
Знайдемо
величину нормального прискорення. При
досить малому проміжку часу ∆t
дугу АВ = ∆S
можна вважати хордою. Тоді із подібності
трикутників ∆АОВ і ∆DВC
(вони обидва рівнобедрені з однаковим
кутом α, що лежить проти основs)
запишемо відношення відповідних сторін,
і знайдемо
![]()
![]() .
.
Тоді величина нормального прискорення
![]() .
(2.7)
.
(2.7)
 При
зменшенні ∆t
до нуля кут α теж зменшується до нуля,
а тому кут CDE
→ 90o.
Отже нормальне і тангенціальне прискорення
взаємно перпендикулярні. Тангенціальне
прискорення направлене по дотичній до
траєкторії, тому його ще називають
дотичним прискоренням, а нормальне
перпендикулярне до нього і направлене
вздовж радіуса кривизни R
до центра,
тому його ще називають доцентровим
прискоренням. Величина дотичного
прискорення
При
зменшенні ∆t
до нуля кут α теж зменшується до нуля,
а тому кут CDE
→ 90o.
Отже нормальне і тангенціальне прискорення
взаємно перпендикулярні. Тангенціальне
прискорення направлене по дотичній до
траєкторії, тому його ще називають
дотичним прискоренням, а нормальне
перпендикулярне до нього і направлене
вздовж радіуса кривизни R
до центра,
тому його ще називають доцентровим
прискоренням. Величина дотичного
прискорення
![]() (2.8)
(2.8) ![]() і
характеризує зміну величини швидкості.
і
характеризує зміну величини швидкості.
Величина повного прискорення, як видно із рис.2.3, знаходиться по теоремі Піфагора
![]() .
(2.9)
.
(2.9)
2.6 Класифікація руху в залежності від значень нормального і дотичного прискорень
Так як
![]() ,
то при аn
= 0 і V
≠ 0 R
→ ∞. Це означає, що траєкторія уявляє
собою пряму лінію.
,
то при аn
= 0 і V
≠ 0 R
→ ∞. Це означає, що траєкторія уявляє
собою пряму лінію.
При
![]() V
= const.
Рух рівномірний.
V
= const.
Рух рівномірний.
Розглянемо декілька варіантів значень аn і аτ:
a)
![]() - прямолінійний рівномірний рух;
- прямолінійний рівномірний рух;
б)
![]() - прямолінійний рівнозмінний рух;
- прямолінійний рівнозмінний рух;
в)
![]() - прямолінійний рух із змінним прискоренням;
- прямолінійний рух із змінним прискоренням;
г)
![]() - рівномірний рух з постійним радіусом
кривизни траєкторії, тобто по колу;
- рівномірний рух з постійним радіусом
кривизни траєкторії, тобто по колу;
д)
![]() - рівнозмінний рух по колу;
- рівнозмінний рух по колу;
е)
![]() - величина швидкості зростає, так як
- величина швидкості зростає, так як
![]() .
Отже повинен зростати і радіус кривизни
траєкторії, щоб аn
залишалось
незмінним. Маємо рух тіла по спіралі,
яка розкручується.
.
Отже повинен зростати і радіус кривизни
траєкторії, щоб аn
залишалось
незмінним. Маємо рух тіла по спіралі,
яка розкручується.
2.7 Рух тіла по колу. Кутова швидкість та кутове прискорення. Аналогія поступального і обертального рухів
При вивченні обертального руху зручніше характеризувати його
н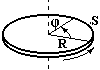 е
лінійними параметрами (шлях, швидкість,
лінійне прискорення), а кутовими: кутом
повороту, кутовою швидкістю, кутовим
прискоренням. Зручність зумовлена тим,
що для різних точок тіла кутові
характеристики однакові на відміну від
лінійних.
е
лінійними параметрами (шлях, швидкість,
лінійне прискорення), а кутовими: кутом
повороту, кутовою швидкістю, кутовим
прискоренням. Зручність зумовлена тим,
що для різних точок тіла кутові
характеристики однакові на відміну від
лінійних.
Дамо означення кутовим характеристикам обертального руху.
Кут повороту φ – це кут, на який повертається радіус-вектор будь-якої точки тіла. Вимірюється в радіанах. Довжина дуги (шлях S) зв’язана з кутом повороту (кутовою координатою) через радіус
![]() .
(2.10)
.
(2.10)
Кутова швидкість ω - це границя відношення кута повороту ∆φ до проміжку часу ∆t, за який цей поворот здійснений, при умові, що ∆t зменшується до нуля, тобто перша похідна від кута повороту за часом
![]()
 .
(2.11)
.
(2.11)
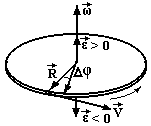
Не дивлячись, що кут повороту величина скалярна, кутову швидкість прийнято вважати вектором (рис.2.4), направленим вздовж осі обертання у відповідності з правилом правого гвинта: якщо обертати гвинт з правою різьбою разом з тілом, то поступаль ний рух гвинта вкаже напрямок Рисунок 2.4 вектора кутової швидкості. З кінця цього вектора обертання тіла видно проти годинникової стрілки. Вимірюється кутова швидкість в 1/с.
Встановимо зв’язок між кутовою та лінійною швидкостями, скориставшись означеннями швидкостей (2.2), (2.11) і співвідношенням (2.10).
![]()
 (2.12)
(2.12)
Вектори
![]() ,
як видно із рис.2.4, взаємно-перпендикулярні.
Тому рівняння (2.12) записують у векторній
формі через векторний добуток
,
як видно із рис.2.4, взаємно-перпендикулярні.
Тому рівняння (2.12) записують у векторній
формі через векторний добуток
![]() .
(2.13)
.
(2.13)
Кутове
прискорення
![]() - це границя
відношення зміни кутової швидкості
- це границя
відношення зміни кутової швидкості
![]() до проміжку часу ∆t,
за який ця зміна відбулася, при умові,
що ∆t
→ 0, тобто це перша похідна від кутової
швидкості за часом.
до проміжку часу ∆t,
за який ця зміна відбулася, при умові,
що ∆t
→ 0, тобто це перша похідна від кутової
швидкості за часом.
![]() .
(2.14)
.
(2.14)
Так
як вектор
![]() направлений по осі обертання, то і вектор
направлений по осі обертання, то і вектор
![]() ,
а отже і вектор кутового прискорення
,
а отже і вектор кутового прискорення
![]() теж направлений вздовж осі обертання
(рис.2.4). У випадку прискореного руху він
співпадає з напрямком кутової швидкості
і протилежний їй при сповільненому
русі. Вимірюється кутове прискорення
в 1/с2.
теж направлений вздовж осі обертання
(рис.2.4). У випадку прискореного руху він
співпадає з напрямком кутової швидкості
і протилежний їй при сповільненому
русі. Вимірюється кутове прискорення
в 1/с2.
Встановимо зв’язок між лінійним та кутовим прискореннями, скориставшись (2.5), (2.13), (2.14) і (2.3),
![]() .
.
Тут
![]() ,
(2.15)
,
(2.15)
![]() (2.16)
(2.16)
відомі нам дотичне і нормальне прискорення.
Приклад.
Одержимо рівняння рівнозмінного
обертального руху. Для нього
![]() (див. п.2.6, випадок 5). Це еквівалентно
співвідношенням
(див. п.2.6, випадок 5). Це еквівалентно
співвідношенням
![]() ,
тобто
,
тобто
![]() .
Інтегруємо останнє рівняння з початковими
умовами: при t
= 0 ω
= ωo,
φ
= φo.
Одержимо рівняння руху
.
Інтегруємо останнє рівняння з початковими
умовами: при t
= 0 ω
= ωo,
φ
= φo.
Одержимо рівняння руху
![]() (2.17)
(2.17)
![]() ,
(2.18)
,
(2.18)
які аналогічні рівняннями прямолінійного рівнозмінного руху
![]()
![]() .
.
Таким
чином, між поступальним і обертальним
рухами існує аналогія величин
![]() і формул. Так у поступальному русі відома
формула
і формул. Так у поступальному русі відома
формула
![]() .
Замінивши відповідні величини, одержуємо
для рівнозмінного обертального руху
.
Замінивши відповідні величини, одержуємо
для рівнозмінного обертального руху
![]() .
.