Материал: 6251
Предполагая малость переменной составляющей коэффициентов по сравнению с постоянной составляющей, для определения нулевого приближения y0(t) полагаем в (1.2.9) F[y(t)]= 0 . Таким образом, уравнение для нулевого приближения будет иметь вид
A(p,v)y0(t)= f (t).
Это уравнение с постоянными коэффициентами и его решение не представляет никакой сложности.
Подставляя в правую часть уравнения (1.2.9) найденное нулевое приближение y0(t), а в левую часть – сумму двух слагаемых ряда (1.2.10), получим уравнение для первого приближения
A(p,v)y1(t)= F[y0(t)].
Повторяя изложенную процедуру, нетрудно получить рекуррентную формулу для вычисления k-го приближения
A(p,v)yk (t)= F[yk−1(t)].
Если очередная поправка yk (t) будет меньше наперёд заданной допустимой ошибки, то это свидетельствует о необходимости прекращения рекуррентной процедуры.
Полученный в результате решения ряд (1.2.10) сходится тем быстрее, чем медленнее меняются коэффициенты дифференциального уравнения (1.2.3).
26
1 . 2 . 2 . Вр еменны́е хар актеристики нестацио нар ных систем
Рассмотрим переходную и весовую функции систем с переменными параметрами.
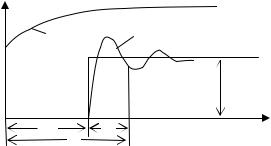
Поскольку коэффициенты дифференциального уравнения системы меняются с течением времени, эти функции будут зависеть от момента приложения входного воздействия. Таким образом, переходную функцию можно обозначить как h(t − v,v)= h(τ,v), где t – текущее время, отсчитываемое, например, от момента включения системы или момента начала наблюдения за ней или момента начала изменения параметров, v – время, соответствующее поступлению на вход единичного ступенчатого воздействия, τ – текущее время, отсчитываемое от момента приложения единичного ступенчатого воздействия (рис. 1.5).
|
ai |
h(τ,v) |
|
|
1 |
v |
τ |
t |
|
t |
|
Рис. 1.5. Переходная характеристика нестационарной системы
Перейдём к весовой функции, которая является, как известно, реакцией на единичный импульс. Единичную импульсную функцию можно представить как предел отношения
27

δ(t − v)= lim 1(t − v)−1(t − (v + v)) . |
(1.2.11) |
|
v→0 |
v |
|
Выход системы при поступлении на вход воздействия (1.2.11), то есть весовую функцию, можно в силу принципа суперпозиции представить в виде разности смещённых на v переходных функций и изменённым в
1 v раз масштабом
w(t − v,v)= lim |
h(t − v,v)− h(t − (v + v),v + v) |
. |
|
||
v→0 |
v |
|
Правая часть последнего выражения – производная от переходной функции по v с обратным знаком, таким образом,
( ) ∂h(t − v,v) w t − v,v = − .
∂t
Весовая функция (равно как и переходная функция) является функцией двух переменных: времени v, соответствующего моменту поступления на вход единичного импульса, и текущего времени t. Таким образом, это некоторая поверхность (рис. 1.6). Для физически реализуемых систем реакция на некоторое воздействие не может появиться раньше этого воздействия, поэтому при t<v весовая функция тождественно равна нулю w≡ 0. Таким образом, при t<v поверхность w(t − v,v) переходит в плоскость t0v. Границе перехода поверхности w(t − v,v) в плоскость t0v соответствует биссектриса t=v.
28
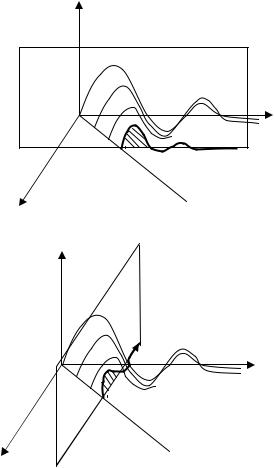
Сечение поверхности весовой функции w(t − v,v) вертикальной плос-
костью, параллельной оси t (рис. 1.6, а), даёт весовую функцию для фиксированного момента приложения единичного импульсного воздействия
w(t-v,v)
v=const
t
v |
t=v |
|
|
|
а |
w(t-v,v)
t= const
θ
t
t=v
v
б
Рис. 1.6. Весовая характеристика
29
(v=const). Эта функция носит название нормальной функции веса. Она является параметрической функцией, так как в неё входит фиксированный параметр v=const.
Нормальная весовая функция зависит от времени t, но может быть сделана и функцией аргумента τ = t −v подстановкой t=v+τ
w(t − v,v)= w(τ,v), v = const .
Если провести сечение поверхности весовой функции w(t − v,v) вертикальной плоскостью, параллельной оси v (рис. 1.6, б), то получится кривая, образованная ординатами семейства нормальных весовых функций для фиксированного значения времени t=const. Эту кривую можно получить путём обработки семейства нормальных весовых функций, полученных для различных моментов приложения входного импульса v.
Зависимость w(t − v,v) от смещения v при фиксированном моменте времени t называется сопряжённой весовой функцией. Сопряжённая весовая функция также является параметрической функцией, так как содержит параметр t=const. Сопряжённую весовую функцию можно представить также как функцию аргумента θ = t −v , который называется ре- верс-смещением, поскольку отсчитывается от точки v=t в сторону, противоположную смещению v. Это осуществляется подстановкой в сопряжённую функцию веса значения v = t −θ при t=const
w(t − v,v)= w(θ,t − θ), t = const .
Если параметры системы не меняются, весовая функция является функцией только времени τ = t −v и не зависит от момента приложения 30