Материал: 6251

W(s)= W1(s) |
|
W2 (s) |
W4 (s). |
|
1+ W |
(s)W |
(s)e−τs |
||
2 |
3 |
|
|
|
Поэтому размыкание в данном случае следует проводить по цепи местной обратной связи. Такое размыкание приведёт к передаточной функции
W(s)= |
|
|
|
W2(s) |
|
W (s)e−τs , |
||
1 |
+W |
(s)W |
(s)W (s) |
|||||
|
3 |
|||||||
|
|
|
2 |
1 |
4 |
|
|
|
имеющей нужный вид.
Наконец, для системы, представленной на рис. 1.3, в, размыкание в указанном месте (см. рис. 1.3, в) приведёт к требуемому виду передаточной функции
W(s)= W3(s()W) 4(s()W)1(s() ) e−τs .
1+W1 s W2 s W4 s
Если получено характеристическое уравнение замкнутой системы в виде A(s)+ B(s)e−τs = 0 , то передаточная функция разомкнутой систе-
мы сразу записывается в виде W (jω)= B((jω))e− jτω без определения места
A jω
размыкания системы на структурной схеме.
Частотная передаточная функция разомкнутой системы представляется, точно так же, как и для звена с запаздыванием, в виде
W(jω)= W (jω)e− jωτ , |
(1.1.8) |
0 |
|
16
где W0 (jω)= A0 (ω)e j ϕ0 (ω) , A0(ω)и ϕ0(ω) – амплитудно-частотная и фазовая частотная функции системы без запаздывания соответственно.
Модуль второго сомножителя в выражении (1.1.8) равен единице, а фаза – минус ωτ, поэтому представляя выражение (1.1.8) в форме W (jω)= A(ω)e j ϕ(ω) , получим
A(ω)= A0 (ω),
ϕ(ω)= ϕ0 (ω)− ωτ.
Таким образом, наличие в системе звена чистого запаздывания не меняет модуля частотной передаточной функции и вносит только дополнительный фазовый сдвиг. Этот фазовый сдвиг τω, пропорциональный частоте, «закручивает» годограф АФЧХ, особенно в высокочастотной области, по часовой стрелке. В общем случае, это ухудшает условия устойчивости, так как приближает годограф к критической точке (−1, j0). Но в некоторых случаях при сложной форме кривой АФЧХ введение постоянного запаздывания может улучшить условия устойчивости.
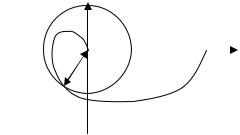
По имеющемуся годографу АФЧХ системы без запаздывания W0(jω) можно найти критическое значение времени запаздывания τ=τкр, при котором система с запаздыванием оказывается на границе устойчивости. Для этого на годографе следует найти точку, для которой модуль равен единице. Обозначим соответствующую частоту ω1 (эта частота равна частоте среза ωср), а фазу – φ1 (рис. 1.4). Тогда при введении постоянного запаздывания τ=τкр условие совпадения этой точки с критической точкой (−1, j0) запишется как ϕ1 − ω1τкр = −π , откуда критическое время запаздывания равно
17
τ = |
π+ ϕ1 |
. |
(1.1.9) |
|
|||
кр |
ω1 |
|
|
|
|
||
 ω→∞ ω=0 -1
ω→∞ ω=0 -1  φ1
φ1
1  ω=ω1
ω=ω1 
Рис. 1.4. Определение критического времени запаздывания
Если подобных точек на кривой АФЧХ несколько, следует сделать расчеты для всех таких точек и взять наименьшее значение τкр.
Оценку качества регулирования в системах с запаздыванием и с распределёнными параметрами проще всего проводить при помощи частотных критериев качества. Для расчета могут успешно применяться логарифмические характеристики.
Построение переходных характеристик удобнее всего производить также на основе использования частотных характеристик, в частности, по вещественной частотной функции. Для построения переходных процессов могут применяться графические и численно-графические методы, а также ЦВМ.
Сформулируем некоторые выводы.
1.В структуре системы с запаздыванием всегда можно выделить звено чистого запаздывания.
18
2.Передаточная функция звена чистого запаздывания – это
e−τs .
3.Наличие постоянного запаздывания не меняет амплитудночастотную функцию, но вносит дополнительный отрицательный фазовый сдвиг.
4.Запаздывание в системе, как правило, ухудшает условия устойчивости, но в некоторых специальных случаях запасы устойчивости могут возрастать.
5.Для исследования устойчивости наиболее удобно применять критерий Найквиста, а для оценки качества регулирования – частотные критерии качества.
6.Построение АФЧХ разомкнутой САУ удобнее всего проводить, если её вид соответствует выражению (1.1.8).
7.При получении передаточной функции разомкнутой системы размыкание следует проводить в цепи нахождения звена чистого запаздывания.
1.2.Системы с переменными параметрами
Если параметры системы меняются со временем, мы получаем так называемую нестационарную систему или систему с переменными параметрами. Взаимосвязь входа (входов) и выхода (выходов) такой системы зависит от времени. С точки зрения математического описания непрерывные нестационарные системы описываются дифференциальными уравнениями с переменными коэффициентами.
Нестационарность систем приводит к определённым особенностям в их исследовании, что выражается, в частности, в зависимости передаточ-
19

ной функции от времени и в зависимости временных характеристик как от времени, так и от момента приложения воздействия.
Актуальность исследования нестационарных систем возникла в связи с управлением подвижными объектами, масса которых, а, следовательно, и их динамика меняется с течением времени (например, вследствие расхода топлива).
1 . 2 . 1 . Диффер енциальные ур авнения нестацио нар ных систем
В общем виде линейное дифференциальное уравнение n-го порядка с переменными коэффициентами задаётся уравнением
a (t) |
dny(t) |
|
+a (t) |
dn−1y(t) |
|
+...+a (t)y(t)= b (t) |
dmg(t) |
|
+...+b (t)g(t), (1.2.1) |
|
|
|
|
||||||||
0 |
dtn |
1 |
dtn−1 |
n |
0 |
dtm |
m |
|||
|
|
|
|
|
||||||
где y(t) и g(t) – скалярные выход и вход системы соответственно.
Вспоминая обозначение для оператора дифференцирования p = d , dt
уравнение (1.2.1) можно записать в сокращённой форме
A(p,t)y(t)= B(p,t)g(t), |
(1.2.2) |
где формальное определение операторов A(p,t)и B(p,t) следует из срав-
нения уравнений (1.2.1) и (1.2.2).
Полагая, что вход системы известен, правую часть уравнения (1.2.2) можно представить как вынуждающую функцию f(t), и тогда это уравнение можно переписать также в виде
20