Материал: 6251
Дано.
1.Система дифференциальных уравнений (4.2.1).
2.Начальные значения (4.2.2).
3.Конечные значения (4.2.4).
4.Критерий
|
|
t f |
|
I = G(x,u,t) |
|
tt f + ∫ F(x,u,t)dt . |
(4.2.6) |
|
|||
|
0 |
|
|
|
|
t0 |
|
Необходимо среди всех функций u(t), удовлетворяющих уравнениям (4.2.1) с начальными (4.2.2) и конечными (4.2.4) условиями выбрать функцию u(t), минимизирующую критерий (4.2.6).
Процедуру нахождения функции u(t) называют вариационным методом. Если интерпретировать x(t) как вектор состояния объекта (процесса), а под u(t) понимать вектор управления, то оптимальное управление по
минимуму интеграла сводится к задаче Лагранжа. Оптимальное управление конечным состоянием и управление с максимальным быстродействием – это задача Майера. К задаче Больца сводится управление по минимуму интеграла с ограничениями на конечное состояние или управление по минимуму времени перехода в заключительное состояние при ограничении на величину интеграла.
Из формулировок задач следует, что задача Больца – наиболее общая формулировка задачи вариационного исчисления. Однако всегда можно ввести некоторые дополнительные переменные, с помощью которых можно задачу Лагранжа свести к задаче Больца или к задаче Майера и наоборот.
211
Хотя существует много проблем оптимального управления, которые на первый взгляд не относятся ни к одной из трёх перечисленных задач, всегда можно прибегнуть к тому или иному математическому приёму, позволяющему первоначальную задачу преобразовать к одной из сформулированных выше.
Пример 4.2.1. Задача с производными высокого порядка. Пусть требуется минимизировать критерий
t f |
F(x, x, x,t)dt |
(4.2.7) |
I = ∫ |
||
|
ɺ ɺɺ |
|
t0 |
|
|
при заданных начальных условиях на переменные x и xɺ .
Поскольку в подынтегральном выражении (4.2.7) имеется вторая производная, то ясно, что эта задача не относится непосредственно ни к одной из задач вариационного исчисления. Но путём введения дополнительной переменной y (размерность пространства состояний при этом, разумеется, увеличивается на единицу) исходную задачу можно свести к задаче Лагранжа. Действительно, обозначим xɺ = y .
Тогда критерий (4.2.7) перепишется в виде
I = t∫f F(x, y, yɺ,t)dt ,
t0
а это уже непосредственно задача Лагранжа.
Пример 4.2.2. Переход от задачи Лагранжа к задаче Майера. Пусть требуется минимизировать критерий
212
t f |
|
I = ∫ F(x,xɺ,t)dt . |
(4.2.8) |
t0 |
|
Конечные значения для x заданы.
Выражение (4.2.8) совпадёт с выражением (4.2.3), если обозначить xɺ = u . Эту задачу Лагранжа можно преобразовать к задаче Майера, если ввести дополнительную (n+1-ю) вспомогательную переменную, задав её уравнением
xɺn+1(t)= F(x,xɺ,t).
Тогда критерий оптимальности примет вид
t f |
t f |
|
|
|
|
I = ∫F(x,u,t)dt = ∫ xɺn+1 |
(t)dt = xn+1 |
(t) |
|
tt f , |
|
|
|||||
t0 |
t0 |
|
0 |
||
|
|
|
|
||
а это уже задача Майера.
Пример 4.2.3. Задача с ограничениями в виде неравенств. В данной задаче требуется минимизировать критерий
I = t∫f F(x, xɺ,t)dt
t0
при заданных конечных значениях x в предположении, что на величину xɺ наложено ограничение в виде неравенства
a ≤ xɺ ≤ b .
213
Вводя новую вспомогательную вещественную переменную y, можно заданное неравенство заменить уравнением
ϕ(xɺ, y)= (xɺ− a)(b − xɺ)− y2 = 0 .
4 . 2 . 2 . Миним изация интегрально го кр итер ия
Поскольку любая задача вариационного исчисления может быть приведена к задаче Лагранжа, рассмотрим задачу минимизации интеграла
t f |
|
I = ∫ F(x, xɺ,t)dt , |
(4.2.9) |
t0 |
|
где F – непрерывная функция своих аргументов, а x(t) – дважды дифференцируемая функция времени.
Начальная x(t0) и конечная x(tf) точки могут быть зафиксированы или подвижны.
Случай закреплённых конечных точек. Зафиксируем начальное и конечное значение функции x(t):
x(t0 )= x0 , x(t f )= xf . |
(4.2.10) |
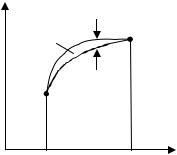
Найдём функцию x(t), доставляющую минимум интеграла (4.2.9). Геометрическая иллюстрация этой задачи заключается в том, чтобы
найти кривую, соединяющую точки (t0, x0 )и (tf , xf ), вдоль которой интеграл от функции F(x, xɺ,t) был бы минимальным (рис. 4.1).
214
x(t) |
δ x |
|
x(t)
 x(t)
x(t)
t0 |
tf |
t |
Рис. 4.1. Задача с закреплёнными конечными точками
Обозначим оптимальную траекторию через x(t), а некоторую близкую к ней – через x(t). Разность между x(t) и x(t) называется вариацией функции x(t)
x(t)− x(t)= δ x .
Вариацию можно представить себе как некоторый малый параметр ε, умноженный на функцию η(t) из того же класса функций, что и x(t). Поскольку точки начала и конца траекторий x(t) и x(t) совпадают, граничные условия для функции η(t) нулевые
η(t0 )= η(tf )= 0 . |
(4.2.11) |
Таким образом,
x(t)= x(t)+ δ x = x(t)+ εη(t), |
|||
|
|
|
(4.2.12) |
x |
(t)= x(t)+ δ x = x(t)+ εη(t). |
||
ɺ |
ɺ |
ɺ ɺ |
ɺ |
|
|
|
215 |