Материал: 6251
Действительно, возведя в квадрат уравнение yэ (t)= kс1x (t) и усред-
нив, получим Dyэ = kc21Dx , откуда непосредственно следует выражение (3.3.13).
Коэффициенты kс0 , kс1 называются коэффициентами статистической линеаризации. Знак у коэффициента (3.3.13) определяется нелинейной функцией: если она возрастает в точке x = mx , то берется знак «плюс», если уменьшается, то знак «минус».
Из формул (3.3.12), (3.3.13) следует, что каждый из коэффициентов статистической линеаризации зависит от плотности вероятности процес-
са на входе нелинейного звена, то есть коэффициент kс0 зависит, в том
числе от σx , а коэффициент kс1 − от mx , что и показано штриховыми стрелками на рис. 3.7.
Поскольку математическое ожидание и дисперсия полностью определяют только нормальный закон распределения, то применение метода статистической линеаризации основано на предположении о нормальности распределения случайного сигнала на входе и о неискажении нормального распределения нелинейным звеном. Это обстоятельство и определяет погрешность данного метода линеаризации.
Рассмотрим второй критерий. Согласно ему уравнение эквивалентно-
го линейного звена определяется из условия |
|
M ((y − yэ )2 )→ min . |
(3.3.14) |
Здесь уже коэффициенты уравнения (3.3.11) будут другими. Подставим выражение (3.3.11) в левую часть условия (3.3.14)
196
M ((y − kc0mx − kc1x (t))2 )= M (y2 )+ kc20mx2 + kc12 Dx − 2kc0mxmy − 2kc21M(x y).
Необходимое условие минимума полученного выражения – равенство нулю частных производных по коэффициентам kс0 и kс1 , откуда нетрудно получить
|
|
|
|
kс0 |
= |
my |
|
, |
|
|
|
|
mx |
(3.3.15) |
|||||||
|
|
|
|
|
|
|
||||
|
|
|
1 |
M (yx )= |
1 |
∞ ϕ(x)x p |
||||
k |
|
= |
(x)dx. |
|||||||
|
|
|
||||||||
|
c1 |
|
Dx |
Dx −∞∫ |
x |
|
||||
Как видно из выражений (3.3.15), первый коэффициент совпадает с ранее найденным, а выражение для второго коэффициента получается другим.
Для типовых нелинейностей и нормального закона распределения существуют таблицы коэффициентов статистической линеаризации, которые можно найти в многочисленной справочной литературе по теории автоматического управления.
Погрешность в расчетах, проведенных по первому и по второму критерию, примерно одинакова, но, как правило, имеет разный знак, в связи с чем рекомендуется для повышения точности для коэффициента kс1
брать среднее арифметическое, посчитанное по обоим критериям.
Если нелинейная характеристика ϕ(x) неоднозначна, уравнение такого звена, кроме самой переменной x будет содержать ещё и производную dx dt . В этом случае формулы (3.3.12), (3.3.13) и (3.3.15) неправомерны, и их нужно усложнять с учетом производной dx
dt . В этом случае формулы (3.3.12), (3.3.13) и (3.3.15) неправомерны, и их нужно усложнять с учетом производной dx dt .
dt .
197
Если характеристика ϕ(x) несимметрична относительно начала координат, то есть не является нечетной, то проявляется эффект выпрямления входного сигнала. Это означает, что среднее значение выходного сигнала my не будет равно нулю даже, если среднее значение сигнала на входе mx = 0 . Поэтому в данном случае нельзя среднее значение myэ выражать через mx с помощью коэффициента kс0 , то есть нельзя записывать
myэ = kc0mx ,
и, соответственно, вместо схемы на рис. 3.7, а следует пользоваться схемой на рис. 3.7, б. Уравнение (3.3.11) также несколько видоизменяется и превращается в уравнение
yэ (t)= myэ + yэ (t)= my + kс1x (t),
где my вычисляется по формуле (3.3.4).
3 . 3 . 3 . Пр им енение статистическо й линеар изации для исследо вания точно сти зам кнутых САУ
Рассмотрим стандартную схему простейшей одноконтурной системы с единичной обратной связью (рис. 3.8), содержащую нелинейное звено, заданное нелинейной характеристикой ϕ(x) и линейную часть W(s). На вход системы поступает сумма детерминированного задающего воздей-
198
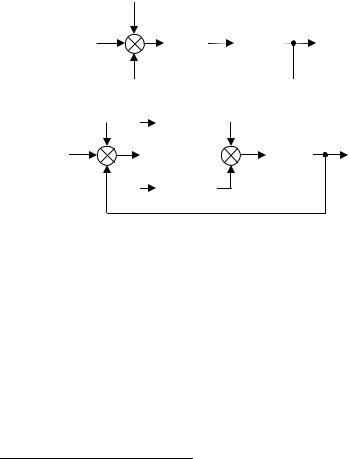
ствия g(t) и приведенного к входу случайного шума n(t). Задающее воздействие будем считать достаточно медленно1 изменяющимся, а сигнал помехи – нормально распределённым, стационарным процессом с нулевым средним, корреляционной функцией Kn(τ) и спектральной плотностью Sn(ω). Нелинейность предполагаем однозначной и нечетной.
n(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
g(t) |
|
|
|
x |
|
|
|
u |
|
|
|
y(t) |
|
|||
|
|
|
|
φ(x) |
|
W(s) |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
− |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
||||
|
|
mx |
|
|
|
|
|
|
|
|
|
|
||||
n(t) |
|
kc0(mx,σx) |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
g(t) |
x |
|
|
|
|
|
|
|
|
u |
|
|
|
|
y(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
W(s) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
− |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
° |
kc1(mx,σx) |
|
|
|
|
|
|
|
|
|
|||
|
|
x |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
б
Рис. 3.8. Статистическая линеаризация замкнутой системы
Проведя линеаризацию нелинейного звена, получим схему, показанную на рис. 3.8, б. Здесь детерминированная составляющая проходит по верхней ветви схемы через звено с коэффициентом передачи kc0(mx,σx), а центрированная случайная составляющая – по нижней ветви через звено с коэффициентом передачи kc1(mx,σx). В скобках для коэффициентов статистической линеаризации показано, что они зависят от неизвестных пока среднего mx и среднеквадратичного σx.
1 Термин «достаточно медленно» означает, что переходные процессы, вызванные задающим воздействием, не принимаются во внимание.
199

Выше было выяснено, что проведение статистической линеаризации обосновано, если распределение сигнала на входе нелинейного звена подчиняется нормальному закону распределения. В нашем случае сигнал на входе нелинейного звена x = g + n − y . При этом воздействие g – детерминированное, воздействие n распределено по нормальному закону, следовательно, предположение о нормальности сигнала x справедливо, только если нормальное распределение имеет сигнал y. Если сигнал на входе нелинейного звена имеет нормальный закон распределения, то пройдя через нелинейное звено, он будет иметь закон распределения, отличный от нормального. Но, как правило, линейная часть является фильтром низких частот, имея конечную полосу пропускания. Чем у́же полоса пропускания, тем ближе закон распределения к нормальному. Поэтому гипотеза фильтра чаще всего выполняется, и можно с полным основанием считать возможным проведение статистической линеаризации1.
Уравнение для детерминированной составляющей имеет вид
Mx |
(s)= G(s) |
|
1 |
|
, |
(3.3.16) |
|
|
|
|
|||||
1 |
+ kc0W(s) |
||||||
|
|
|
|
||||
где Mx (s) и G(s) − лапласовы изображения среднего значения mx и задающего воздействия g соответственно.
Установившееся значение можно найти из выражения (3.3.16) по теореме о конечном значении
1 Можно провести аналогию с подобной гипотезой фильтра в методе гармонической линеаризации.
200