Материал: 6251
можно сделать вывод, что в физически реализуемой системе использует-
ся только реализуемая часть выражения |
Sg (ω) |
в отличие от формулы |
|
ψ(− jω) |
|
||
(3.2.27), где фигурирует все это выражение.
Пример 3.2.4. Спектральная плотность полезного сигнала равна
Sg (ω)= 1+1ω2 . Помеха – это белый шум с единичной интенсивностью
Sn (ω)=1. Требуется определить передаточную функцию оптимальной
системы.
Проводим факторизацию по формуле (3.2.21) |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
2 + ω2 |
|
|
|
+ jω |
|
|
|
(ω)= S |
|
(ω)+ S |
|
(ω)= |
1 |
|
|
|
2 |
||||
S |
|
|
|
|
+1 |
= |
|
= |
|
|
|
|
|||
|
|
|
1+ ω2 |
1+ ω2 |
1+ jω |
||||||||||
|
g+n |
|
g |
|
n |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

 2 − jω . 1− jω
2 − jω . 1− jω
Далее производим расщепление согласно выражению (3.2.25)
Sg (ω) |
= |
1− jω |
1 |
|
|
||
|
(1+ ω2 )( |
|
− jω)= |
(1+ jω)( |
|
− jω)= |
|
ψ(− jω) |
|
|
|||||
2 |
2 |
||||||
11
=(1+ 
 2)(1+ jω) + (1+
2)(1+ jω) + (1+ 
 2)(
2)(
 2 − jω).
2 − jω).
Наконец, по формуле (3.2.26) определяем оптимальную передаточную функцию
Wопт.р (jω)= |
1+ jω |
|
|
1 |
= |
|
1 |
|
|
|
|
. |
||||
|
|
(1+ |
|
)(1+ jω) |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
ω |
|
||||||||
|
2 + jω |
2 |
|
|
|
|||||||||||
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
(2 + |
2)1 |
+ j |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
186
3.3. Стохастические процессы в нелинейных САУ
3 . 3 . 1 . Про хо ждение случайно го сигнала чер ез нелинейные звенья
Выше при рассмотрении прохождения случайного сигнала через линейные звенья использовалось усреднение по времени. Для нелинейных же звеньев основой является усреднение по ансамблю.
Как и в случае детерминированных воздействий методы исследования прохождения случайного сигнала через нелинейные звенья и системы существенно отличаются от подобных методов для линейных систем: они значительно сложнее и разнообразнее. Эти методы существенно различаются в зависимости от одноили многозначности нелинейной характеристики, её динамических свойств, наличия или отсутствии в системе обратных связей и т.д. Из-за сложности или невозможности получения точных решений широкое распространение получили приближенные методы. Наиболее разработаны, конечно, самые простые случаи − именно, прохождение случайного сигнала через нелинейное звено с однозначной безынерционной характеристикой.
Рассмотрим как раз такой случай. На вход звена поступает стохастический процесс x(t) с плотностью вероятности px(t). Процесс на выходе обозначим через y(t) с плотностью вероятности py(t). Пусть нелинейное звено имеет однозначную монотонную возрастающую статическую характеристику y = ϕ(x). Обратную функцию обозначим x = ϕ−1(y), так,
что x = ϕ−1(ϕ(x)). Поскольку характеристика безынерционна, то плот187
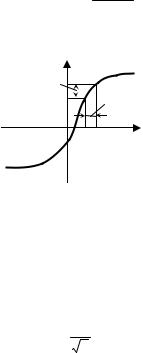
ность вероятности на выходе звена в конкретный момент времени t1 зависит только от плотности вероятности на входе в тот же момент времени. Плотность вероятности сигнала на выходе звена может быть найдена из условия равенства вероятностей попадания входной величины в интервал от x до x+dx, а выходной величины – в интервал от y до y+dy (рис. 3.6)
py (y)dy = px (x)dx .
Из формулы (3.3.1) следует
py (y)= px (ϕ−1(y))dϕ−1(y) . dy
y
dy
y dx
x x
Рис. 3.6. Нелинейная характеристика
(3.3.1)
(3.3.2)
Пример 3.3.1. На вход нелинейного звена с экспоненциальной харак-
теристикой y = ex поступает сигнал x с нормальным (гауссовым) распре-
делением
px (x)= 1π e− x2 .
188
Найдем распределение вероятности на выходе этого звена. Обратная функция равна x = ln y при y>0. По формуле (3.3.2) получаем
p |
|
(y)= |
1 |
e−(ln y)2 |
1 |
= |
|
1 |
|
y−ln y = |
1 |
y−(1+ln y) при y>0. |
||
y |
|
|
|
|
|
|
|
|
||||||
|
|
|
π |
|
y |
π y |
|
|
π |
|||||
|
|
|
|
|
|
|
||||||||
Поскольку выходная величина не может принимать отрицательные значения, вероятность их появления равна нулю. Окончательно получаем
|
1 |
−(1+ln y) |
при y > 0, |
||||
|
(y)= |
|
|
|
y |
|
|
|
|
|
|
|
|||
py |
π |
|
|||||
|
|
|
|
|
|
при y < 0. |
|
|
0 |
|
|
|
|
||
Не столь просто обстоит дело, если обратная функция ϕ−1 является неоднозначной. Такие нелинейности рассматривать не будем.
Математическое ожидание выходного процесса можно подсчитать по формуле (3.1.4)
my = M (y)= ∞∫ ypy (y)dy . |
(3.3.3) |
−∞ |
|
Учитывая, что y = ϕ(x) выражение (3.3.3) можно представить и в другой форме
my = M (ϕ(x))= ∞∫ϕ(x)px (x)dx . |
(3.3.4) |
−∞ |
|
189

Практически пользоваться можно либо выражением (3.3.3) либо формулой (3.3.4) в зависимости от удобства вычислений в том или другом случае.
Из формул (3.3.3), (3.3.4) следует, что связь математических ожиданий на входе и на выходе неоднозначная и зависит как от нелинейной характеристики, так и от плотности распределения сигнала на входе.
Довольно часто решается задача преобразования сигнала с нормальным законом распределения, который определяется только математическим ожиданием mx и дисперсией (или среднеквадратичным отклонением
σx ). В таком случае среднее значение на выходе зависит от нелинейной зависимости ϕ(x), и от mx и σx как параметров
|
|
|
|
my = my (mx ,σx ). |
|
Средний квадрат определится по формуле |
|
||||
|
|
|
|
= M (y2 )= ∞∫ y2 py (y)dy |
|
|
|
|
y2 |
(3.3.5) |
|
|
|
|
|
−∞ |
|
или по эквивалентному выражению |
|
||||
|
|
= M (ϕ(x)2 )= ∞∫(ϕ(x))2 px (x)dx . |
|
||
|
y2 |
(3.3.6) |
|||
|
|
|
|
−∞ |
|
Дисперсия может быть посчитана по формуле
Dy = M ((y − my )2 )= M (y2 − 2y my + m2y )= M (y2 )− m2y = y2 − m2y . (3.3.7)
190