Материал: 6251
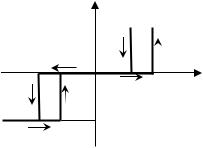
Системы с фазовым портретом на рис. 2.14, б называются системами с жестким режимом возбуждения колебаний. При малых отклонениях от точки равновесия такие системы устойчивы, то есть колебания затухают (внутри области, определяемой неустойчивым предельным циклом 1), а при достаточно больших отклонениях, вызванных, например, внешним воздействием, движение системы неограниченно приближается к устойчивому предельному циклу 2.
Третий вид особых траекторий – сепаратрисы – разделяют фазовую плоскость на области с разным характером траекторий. «Усы» сёдел это типичный пример сепаратрисы. На рис. 2.12 видно, что «усы» седла (асимптоты гипербол) разделяют области с разным характером динамики системы. Если вблизи особой точки «ус» – прямая линия, то на достаточном удалении он может быть уже кривой или даже замкнутой линией.
Итак, определив все особые траектории, мы получаем основу, скелет всех возможных движений в системе. Особые траектории разделяют фазовую плоскость на области с разным характером фазовых траекторий; динамику системы в каждой области нетрудно определить, зная типы особых точек и предельных циклов. Таким образом получают полную картину динамики системы.
2 . 3 . 4 . Мето д интегр ир уемой аппро ксим ации
Основная трудность при исследовании нелинейных систем – это невозможность аналитического решения нелинейных дифференциальных уравнений в общем виде, то есть получения решения в виде конечной комбинации элементарных функций. Идея метода заключается в приближённой замене нелинейности f(t), не допускающей аналитического
86

решения уравнения, на функцию φ(t), при которой такое решение возможно. Поиск такой функции – задача сама по себе неординарная. Но существует метод аппроксимации, который годится практически всегда,
– это кусочно-линейная аппроксимация, то есть замена нелинейной зависимости на ломаную линию. При этом на каждом линейном участке такой ломаной дифференциальное уравнение в целом получается линейным и легко решается. Остаётся согласовать (или как говорят, сшить – отсюда и название метода: метод сшивания или припасовывания) отдельные решения в точках излома соответствующим подбором постоянных интегрирования.
Пример 2.3.1. Рассмотрим релейную систему, структурная схема которой приведена на рис. 2.15.
|
|
|
|
|
kос p |
|
|
|
|
|
|
g |
− ε |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|||
|
|
u |
|
k |
|
|
|
||||
φ(ε) |
|
|
|
||||||||
|
− |
|
|
p(Tp +1) |
|
x |
|||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 2.15. Нелинейная система
Нелинейный элемент – это электромагнитное поляризованное реле с характеристикой, показанной на рис. 2.16.
При увеличении входного напряжения ε>δ реле срабатывает, и выходной сигнал принимает значение +1. При уменьшении входного сигнала ε реле отпускает при меньшем напряжении λε (0<λ≤1). Это происходит по причине эффекта остаточного намагничивания стального сердечника
87
катушки реле. При отрицательных значениях ε наблюдается симметричная картина.
φ(ε)
1 

−δ −λδ
λδ δ ε
−1
Рис. 2.16. Релейная характеристика
Для простоты положим задающее воздействие равным нулю g=0. Запишем уравнения, связывающие переменные в системе, структур-
ная схема которой приведена на рис. 2.15:
p(Tp +1)x = ku,
u = ϕ(ε), |
(2.3.8) |
ε = −(1+ kос p)x. |
|
Исключив промежуточные переменные, сведем систему уравнений (2.3.8) к одному уравнению
|
d2x |
|
dx |
|
dx |
|
||
T |
|
|
+ |
|
= −kϕ x + kос |
|
. |
(2.3.9) |
dt |
2 |
dt |
|
|||||
|
|
|
dt |
|
||||
Правая часть уравнения (2.3.9) может принимать три значения: −1, 0 и +1. При каждом из этих трёх значений уравнение (2.3.9) является линейным и, следовательно, легко интегрируется.
88

Начнём рассмотрение системы с простейшего случая при отключенной местной обратной связи (это будет, если положить kос=0). Уравнение (2.3.9) преобразуется тогда в уравнение
2
T d x + dx = −kϕ(x). (2.3.10) dt2 dt
Имея в виду построение фазового портрета системы, перейдём от одного уравнения второго порядка к двум уравнениям первого порядка,
введя обозначение y = dx dt
T dy + y = −kϕ(x),
dt |
(2.3.11) |
|
|
||
|
dx |
= y. |
|
|
|
|
dt |
|
Положим вначале λ=1 (см. рис. 2.16). В этом случае уравнения (2.3.10) можно переписать как
|
|
0 |
при |
|
x |
|
< δ, |
|
|
|
|
|
|
||||
|
dy |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
T |
|
+ y = − k |
при x > δ, |
|
||||
dt |
|
|||||||
|
|
при x < −δ, |
(2.3.12) |
|||||
|
|
|||||||
|
|
+ k |
|
|||||
dx = y. dt
Поделив второе из уравнений (2.3.12) на первое, получим дифференциальные уравнения фазовых траекторий для трёх случаев.
1. При x < δ
89
T |
dy |
= −k . |
(2.3.13) |
|
|||
|
dx |
|
|
2. При x > δ
T |
dy |
= − |
y + k |
. |
(2.3.14) |
|
|
||||
|
dx |
|
y |
|
|
3. При x < −δ
T |
dy |
= − |
y − k |
. |
(2.3.15) |
|
|
||||
|
dx |
|
y |
|
|
Таким образом, вся фазовая плоскость делится на три зоны. Интегрируя уравнение (2.3.13), получаем семейство траекторий для
первой зоны
T(y − y0)= k(x0 + x), |
(2.3.16) |
где x0, y0 – начальные значения.
Уравнение (2.3.16) описывает семейство прямых линий (рис. 2.17). Уравнение фазовых траекторий в зоне 2 получим интегрированием
уравнения (2.3.15). Разделив переменные, имеем
|
ydy |
|
kdy |
|
|
T |
|
= −dx или T dy − |
|
|
= −dx . |
|
|
||||
|
y + k |
|
|
|
|
|
|
y + k |
|
||
90