Материал: 6251
Область 1 является областью устойчивости, так как фазовая траектория, начавшись из любой точки этой области, после, возможно, полуколебания приближается к отрезку устойчивости. В области 2 наблюдаются расходящиеся колебания, приближающиеся, в конце концов, к предельному циклу изнутри. Область 3 – область с затухающими колебаниями (фазовые траектории «наматываются» снаружи на предельный цикл).
Рассмотренный выше пример показывает, что точное исследование даже столь простой релейной системы наталкивается на значительные трудности (а ведь в этом примере ещё не рассмотрено влияния параметров на возникновение или прекращение автоколебаний). Поэтому желательно иметь какие-нибудь приближённые методы, предлагающие хотя бы достаточные условия устойчивости. Такие методы будут рассмотрены ниже.
2 . 3 . 5 . Мето д точечных пр еобр азо ваний
Вообще, метод точечных преобразований Пуанкаре и Биркгоф предложили довольно давно. Идею применить этот метод к исследованию нелинейных САУ впервые высказал академик А.А. Андронов в 1944 г.
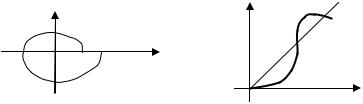
Для пояснения метода точечных преобразований представим, что в некоторый момент времени изображающая точка находится на положительной полуоси x. Пусть абсцисса этой точки равна x0 (рис. 2.21, а).
Если в системе есть колебания, то через период (после обхода начала координат или другой точки равновесия) фазовая траектория пересечет положительную полуось x в некоторой другой точке x1. Определение точки x1 по точке x0 называется точечным преобразованием.
96
|
y |
|
|
x1 |
B |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
x0 |
|
A |
|
|
|
|
|
|
|
|
x1 |
|
x |
|
|
|
|
|
|
|
а |
|
|
|
|
x0 |
|
|
|
|
б |
Рис. 2.21. Метод точечного преобразования
Поскольку через каждую (кроме особой) точку полуоси x проходит только одна фазовая траектория, существует однозначная функция, преобразующая произвольную точку полуоси в другую точку той же полуоси после обхода изображающей точкой начала координат x1 = f (x0 ). График этой функции называется диаграммой точечного преобразования (рис. 2.21, б). Зависимость x1 = f (x0 ) определяет точечное преобразование положительной полуоси (или любой другой полупрямой, выходящей из начала координат) в саму себя.
Если в результате точечного преобразования некоторая точка переходит сама в себя (то есть остаётся неподвижной x1 = x0 ), то это означает, что через эту точку проходит замкнутая траектория (предельный цикл). Определив такие точки (на рис. 2.21, б это точки пересечения диаграммы точечного преобразования с биссектрисой прямого угла) мы определим параметры предельного цикла. Смысл точечного преобразования в том, что для нахождения неподвижных точек нет необходимости строить фазовый портрет системы. Это можно проделать непосредственно по уравнениям системы.
Часть диаграммы точечного преобразования, лежащая под биссектрисой прямого угла, соответствует затухающим колебаниям, а часть, распо97
ложенная выше – расходящимся. Поэтому точка A на рис. 2.21, а соответствует неустойчивому предельному циклу, а точка B – устойчивому.
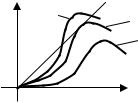
Метод точечного преобразования удобен также для выяснения влияния изменяемых параметров на динамику системы, в частности, для определения критических (так называемых бифуркационных) значений параметров, качественно меняющих поведение системы. В качестве примера на рис. 2.22 приведены диаграммы преобразований для трёх разных значений параметров.
x1 1 |
B |
2 |
|
|
|||
|
C |
||
A |
3 |
||
|
x0
Рис. 2.22. Влияние параметров системы на диаграмму точечного преобразования
Диаграмма 1 соответствует существованию неустойчивого (точка A) и устойчивого (точка B) предельного цикла. Диаграмма 3 соответствует устойчивости системы в целом. Диаграмма 2 касается биссектрисы в точке C, которая соответствует полуустойчивому предельному циклу. Малейшее изменение параметра системы в одну сторону приводит к устойчивости системы в целом, а в другую – к наличию незатухающих колебаний. Таким образом, кривая 2 соответствует бифуркационному значению параметра.
98
2 . 3 . 6 . В тор о й м ето д Ляпунова
Второй метод Ляпунова, называемый ещё прямым методом, даёт достаточные условия устойчивости. Он применим к любым нелинейным системам. По сути, Ляпунов в своём методе обобщил известную теорему Дирихле, согласно которой устойчивой является точка равновесия с минимумом потенциальной энергии. Первоначально Ляпунов разработал второй метод для определения локальной устойчивости, то есть устойчивости в малом (при достаточно малых отклонениях от точек равновесия). Впоследствии этот метод был распространён и для исследования устойчивости в большом или в целом.
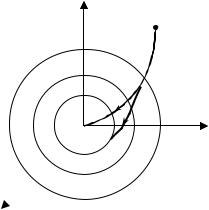
Ляпунов предложил ввести в рассмотрение функцию переменных состояния системы V(x1,x2,...xn ), до известной степени напоминающую потенциальную энергию материальной точки. Рассмотрим в пространстве состояний замкнутую поверхность произвольной формы, например, гиперсферу (рис. 2.23 для трёхмерного пространства)
V(x ,x ,..., x )= x2 |
+ x2 |
+...+ x |
2 |
= C2 , |
(2.3.24) |
||
1 2 |
n |
1 |
2 |
|
n |
|
|
где C – радиус гиперсферы.
С уменьшением C поверхность сжимается, то есть сфера с меньшим C
находится целиком внутри сферы с бо́льшим C (на рис. 2.23 C1 <C2 <C3 ). Наконец, если C→0, поверхность стягивается в начало координат, то есть
V(0,0,...,0)= 0 . Таким образом, функция V во всём пространстве состояний имеет один знак (в случае (2.3.24) – положительный), а в начале координат обращается в нуль. Функции с такими свойствами называются знакоопределёнными.
99
x2
M
С1 x1 С2
С3
x3
Рис. 2.23. Ко второму методу Ляпунова
Если при всех движениях системы, например, из произвольной точки M (см. рис. 2.23), будет выполняться условие
dV |
< 0 , |
(2.3.25) |
|
||
dt |
|
|
это будет означать, что изображающая точка все время переходит с поверхности с бо́льшим С на поверхность с ме́ньшим С, асимптотически приближаясь, в конце концов, к точке равновесия (началу координат). Самое интересное, что для нахождения полной производной по времени (2.3.25) совсем не обязательно решать дифференциальное уравнение, описывающее динамику системы; для этого достаточно представить уравнение системы в нормальной форме Коши
100