Материал: 6251
Пусть теперь одно из решений уравнений (2.3.3) – x0, y0 . Исследуем характер устойчивости в этом положении равновесия. Рассмотрим малую окрестность состояния равновесия x = x0 + ξ, y = y0 +η. Разложим правые части уравнений (2.3.1) в ряд Тейлора в окрестности особой точки. Получим
P((x, y))= P((x0, y0 ))+ aξ + bη+{чл. высш. порядка малости поξ и η}, (2.3.5) Q x, y = Q x0, y0 + cξ + dη+{чл. высш. порядка малости поξ и η}.
Здесь коэффициенты a,b,c и d – частные производные от P и Q по x и y:
a = ∂P |
x=x0 , |
b = |
∂P |
|
|
c = |
∂Q |
|
x=x0 , |
d = ∂Q |
|
. |
|
|
|||||||||||
dx |
|
dy |
x=x0 , |
|
dx |
dy |
x=x0 , |
|
||||
|
y=y0 |
|
|
|
y=y0 |
|
|
|
y=y0 |
|
y=y0 |
|
Учитывая, что в особой точке выполняются равенства (2.3.3), а также,
что dx = dξ , dy = dη , получаем (отбросив члены высшего порядка ма- dt dt dt dt
лости относительно ξ и η) уравнения линейного приближения
dξ |
= aξ + bη, |
||
|
|||
dt |
(2.3.6) |
||
dη |
|||
= cξ + dη. |
|||
|
|
||
dt
Матрица системы уравнений состояния (2.3.6) есть матрица
a |
b |
, а характеристическое уравнение |
A = |
|
|
c |
d |
|
|
|
71 |
|
λE− A |
|
= |
λ − a |
− b |
= λ2 − (a + d)λ + (ad − cb)= 0 |
(2.3.7) |
|
|
||||||
|
|
|
|
− c |
λ − d |
|
|
|
|
|
|
|
Заслугой Ляпунова является то, что он строго доказал следующие теоремы, касающиеся устойчивости в малом (то есть при малых отклонениях от невозмущенного режима) и позволяющие судить об устойчивости режимов нелинейной системы по устойчивости соответствующей линеаризованной модели.
Теорема 2.3.1. Если все корни характеристического уравнения линеаризованной системы имеют отрицательные вещественные части, то есть линеаризованная система устойчива, то невозмущённое движение реальной нелинейной системы асимптотически устойчиво, и учёт членов высшего порядка малости не может сделать систему неустойчивой.
Теорема 2.3.2. Если среди корней характеристического уравнения линеаризованной системы имеется хотя бы один корень с положительной вещественной частью, то есть линеаризованная система неустойчива, то невозмущённое движение реальной нелинейной системы также неустойчиво, и учёт членов высшего порядка малости не может сделать систему устойчивой.
Теорема 2.3.3. Если линеаризованная система находится на границе устойчивости, то реальная нелинейная система может быть как устойчивой, так и неустойчивой, то есть учёт членов высшего порядка малости может сделать систему как устойчивой, так и неустойчивой. Следовательно, в данном случае для суждения об устойчивости нелинейной системы следует привлекать другие методы.
Рассмотрим различные типы особых точек, характеризующихся разными картинами фазовых траекторий в окрестностях этих точек.
72
От уравнений состояния в общем виде (2.3.6) всегда можно перейти к системе канонических уравнений фазовой переменной (например, по методу Данилевского [3]), то есть от системы координат (ξ,η) перейти к системе координат (x1,x2 ). При этом матрица системы будет иметь вид матрицы Фробениуса, и уравнения будут иметь вид
xɺ1 = x2,
xɺ2 = (cb − ad)x1 + (a + d)x2.
Последнюю систему уравнений удобнее переписать в виде
x1 = x2, |
|
|
||
ɺ |
|
|
(2.3.8) |
|
xɺ |
= − p x − 2hx , |
|||
|
||||
2 |
1 |
2 |
|
|
где p = ad − cb, 2h = −a − d.
С учетом введенных обозначений характеристическое уравнение (2.3.7) примет вид
λ2 + 2hλ + p = 0 . |
(2.3.9) |
Возможны следующие случаи.
1 . Корни характеристического уравнения мнимые. Очевидно, это будет при h = 0, p > 0. Примером такого уравнения является уравнение
ɺxɺ+ ω2x = 0 , |
(2.3.10) |
0 |
|
73
описывающее свободное движение (переходную составляющую решения) консервативного (идеального колебательного) звена.
Как известно, решением уравнения (2.3.10) является
x = Acos(ω0t + ϕ), |
(2.3.11) |
где А и φ – константы, определяемые начальными значениями. Продифференцировав последнее выражение по времени и обозначив
x1 = x, x2 = xɺ1, получим
x1 = Acos(ω0t + ϕ), x2 = −Aω0 sin(ω0t + ϕ).
Из двух последних соотношений нетрудно получить уравнение фазовой траектории
x2 |
|
x |
2 |
|
|
1 |
+ |
|
2 |
= 1, |
|
A2 |
A2ω2 |
||||
|
|
||||
|
|
|
0 |
|
|
представляющее собой уравнение эллипса с полуосями А и Aω0 . Для различных начальных условий получаем и различные значения А. Таким образом, фазовые траектории такой системы – это семейство эллипсов, непересекающихся и вложенных друг в друга (рис. 2.7).
Решение (2.3.11) – это незатухающие колебания около положения равновесия. Изображающая точка, находясь на каком-либо эллипсе, будет все время по нему двигаться вокруг точки равновесия. Точки равновесия такого типа, когда фазовые траектории представляют собой за-
74
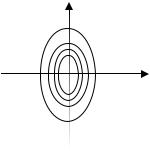
мкнутые, вложенные друг в друга кривые, окружающие точки равновесия,
x2
x1
Рис. 2.7. Особая точка типа «центр»
называются центрами. Понятно, что достаточно малым начальным отклонениям от положения равновесия будет соответствовать столь же малая область на фазовой плоскости, за которую не выйдет изображающая точка. Таким образом, точка равновесия центр будет устойчивой по Ляпунову. Подобные точки равновесия характерны для консервативных (у которых нет обмена энергией с окружающей средой) систем.
2. Корни характеристического уравнения комплексно сопряженные с отрицательной вещественной частью. Для характеристического уравнения (2.3.9) это будет выполняться при
h > 0,
h2 |
(2.3.12) |
< p. |
Решение уравнений (2.3.8) имеет вид затухающих колебаний
x1 = C1e−ht cos(ωt + ϕ1), x2 = C2e−ht cos(ωt + ϕ2 ),
75