Материал: 6251
прикрепленной к вторичному валу. При изменении направления вращения первичного вала, последний свободно поворачивается на некоторый угол, в то время когда вторичный вал неподвижен. Таким образом, каждому угловому положению ведущего вала x1 соответствует множество угловых положений ведомого вала x2, удовлетворяющих соотношению
k(x1 − a)≤ x2 ≤ k(x1 + a),
где k – передаточное число редуктора, ±a – величина люфта. Конкретное значение x2 определяется максимальным или минимальным его значением, предшествующим рассматриваемому моменту времени (рис. 2.3, б).
x2 |
x2 |
2 |
|
|
|
|
|
|
|
xɺ2 |
|||||
|
|
|
|
|
|
|
3 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
1 |
|
|
|
|
|
|
|
v = ka |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
-a |
|
|
|
|
|
4 |
|
|
−ka<v≤ ka |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
a x |
1 |
|
−ka≤v< ka ɺ |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v = −ka |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
в |
||
а
x1
Рис. 2.3. Звено типа «люфт»
Аналитическое выражение для характеристики типа «люфт», задано формулой
|
|
ɺ |
при xɺ1 > 0 |
и v = ka, |
||
|
k x1 |
|
|
< 0 |
и v = −ka, |
|
xɺ2 |
|
|
при xɺ1 |
|||
= |
|
|
|
|
(2.2.3) |
|
|
|
|
при xɺ1 > 0 |
и − ka ≤ v < ka, |
||
|
0 |
|
|
ɺ |
< 0 |
и − ka < v ≤ ka, |
|
|
|
|
при x |
||
|
|
1 |
|
|
||
|
|
|
|
|
|
61 |
где v = kx1 − x2 . Согласно выражению (2.2.3) xɺ2 однозначно и нелинейно
зависит от двух переменных – xɺ1 и v.
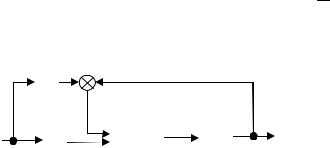
Зависимость xɺ2 от xɺ1, заданная уравнением (2.2.3), приведена на рис. 2.3, в для различных значений v. Если ввести обозначение xɺ2 = ϕ(xɺ1,v) для зависимости (2.2.3), то для звена типа «люфт» можно составить
структурную схему, приведенную на рис. 2.4. На этом рисунке s = d – dt
оператор дифференцирования. |
|
|
|
|
|
|
|||||||
|
|
|
|
kx1 |
− |
|
|
|
|
|
|
||
|
|
k |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
ɺ |
|
|
s |
−1 |
|
|
|
|
|
|
|
|
ϕ(x1,v) |
ɺ |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
1 |
|
|
|
|
ɺ |
|
x |
2 |
|
|
x |
2 |
|
|
|
|
|
x1 |
|
|
|
|
||||
Рис. 2.4. Схема моделирования звена «люфт»
В механических, пневматических, электрических и других системах часто встречаются звенья типа «упор», когда изменение выходной величины ограничено в двух направлениях, а входная величина может меняться неограниченно. Пример такого устройства приведен на рис. 2.5, а.
Здесь ведущий вал связан с ведомым валом фрикционной муфтой, которая расщепляется, как только момент сопротивления превысит некоторое предельное значение. Ведомая же часть имеет упоры при её перемещении в двух направлениях, так что, как только ведомый вал дойдет до упора, возникает большой момент сопротивления и фрикционная муфта расщепляется, а ведущий вал продолжает вращение при неподвижном
ведомом вале. Если направление вращения ведущего вала меняется, муф62
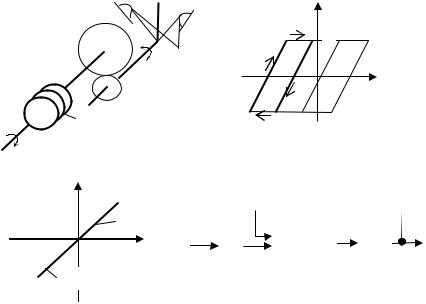
та снова входит в зацепление и ведомый вал начинает вращаться вместе с ведущим валом.
|
|
|
x2 |
|
упор |
2 |
3 b |
|
|
|
|
x2 |
|
|
|
|
|
|
x1 |
фрикционная |
1 |
4 |
−b |
|
|
|
муфта |
б |
x1 |
|
|
а |
|
|
|
|
xɺ2
x1=−b |
−b < x2 ≤ b |
x1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ɺ |
|
|
|
−1 |
|
|
||
x1=b |
|
s |
|
|
|
|
s |
|
|
|||
ɺ |
|
|
|
ψ(x1,x2 ) |
|
|
|
|
|
|||
|
x |
|
|
|
|
|
ɺ |
|
|
|
x2 |
|
|
1 |
|
|
ɺ |
|
x |
2 |
|
|
|||
|
|
|
|
x1 |
|
|
|
|
|
|
||
−b < x2 ≤ b
г
в
Рис. 2.5. Звено типа «упор»
Обозначая, как и прежде, через x1 и x2 углы поворота ведущего и ведомого вала соответственно, зависимость между ними можно изобразить графиком, представленным на рис. 2.5, б. Из этого графика видно, что каждому положению ведущего вала x1 соответствует множество положений ведомого вала x2, удовлетворяющих неравенству −b ≤ x2 ≤ b.
Аналитически соответствующие зависимости для характеристики звена типа «упор» можно представить выражением
63
|
|
ɺ |
при xɺ1 > 0 |
и − b ≤ x2 |
< b, |
|||
|
k x1 |
|
|
< 0 |
и − b < x2 |
≤ b, |
||
xɺ2 |
|
|
при xɺ1 |
|||||
= |
|
при xɺ1 > 0 |
и x2 |
= b, |
(2.2.4) |
|||
|
|
|
|
|||||
|
0 |
|
|
ɺ |
< 0 |
и x |
= −b, |
|
|
|
|
при x |
|||||
|
|
|
1 |
|
2 |
|
|
|
где k – передаточное число редуктора. Эта зависимость приведена на рис. 2.5, в.
Из выражения (2.2.4) видно, что xɺ2 является однозначной (нелинейной) функцией двух переменных – xɺ1 и x2. Если ввести соответствующее обозначение xɺ2 = ψ(xɺ1,x2 ), то структурную схему модели, реализующей звено типа «упор», можно изобразить так, как это приведено на рис. 2.5, г.
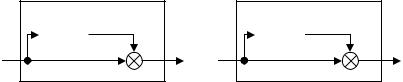
Из сравнения нелинейных звеньев типа «люфт» и «упор» можно сделать вывод о том, что циклическое изменение входа x1 приводит к циклическому изменению выхода x2. На рис. 2.3, б и 2.5, б это выражается замкнутыми контурами 1-2-3-4, но обход соответствующего контура для звена типа «люфт» осуществляется против часовой стрелки, а для звена типа «упор» – по часовой стрелке. Этот факт даёт основание считать, что при a=b и k=1 параллельное соединение этих двух звеньев даёт безынерционное звено с единичным коэффициентом передачи. То есть эти два звена являются взаимно дополняющими в указанном выше смысле. Следовательно, вычитая из исходного сигнала выходной сигнал звена «люфт», получим звено «упор» (рис. 2.6, а). Наоборот, вычитая из исходного сигнала выходной сигнал звена «упор», получим звено «люфт» (рис. 2.6, б).
64
|
Люфт |
|
|
|
Упор |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
Упор |
|
− |
|
|
Люфт |
|
− |
|
|
|
|
|
|
|
|
|
|
|||
x1 |
x2 |
x1 |
x2 |
|||||||
|
|
|||||||||
|
а |
|
|
|
б |
|
|
|||
|
Рис. 2.6. Взаимозаменяемость звеньев типа «люфт» и «упор» |
|
|
|||||||
2.3. Методы исследования нелинейных систем
Строго формализованных методов построения математических моделей нелинейных систем любого типа не существует. Главная рекомендация здесь – идеализируя характеристики реальных элементов желательно выбирать наиболее простые функциональные зависимости, отражающие все-таки главные моменты изучаемых процессов. При этом следует иметь в виду, что нелинейные характеристики могут оказывать существенное влияние не только на количественную сторону процессов, но и вызывать качественно новые эффекты.
Перед тем, как приступить к изложению методов исследования нелинейных систем, уточним одно из основных понятий в теории систем вообще и теории управления в частности, а именно, – устойчивости в отношении нелинейных систем.
2 . 3 . 1 . Нелинейные систем ы и усто йчиво сть
В случае нелинейных систем ранее введённое понятие устойчивости линейных систем – ограниченность реакции при ограниченном воздействии – становится неправомерным.
65