Материал: 6251
нелинейных системах могут быть незатухающие колебания (автоколебания). В случае достаточной малости этих автоколебаний такая система вполне работоспособна. В пространстве состояний незатухающие колебания соответствуют замкнутой траектории под названием предельный цикл.
4.В устойчивой линейной системе при наличии входного гармонического сигнала выходной сигнал в установившемся режиме также гармонический с той же частотой, что и входной сигнал. В нелинейных системах это может быть не так.
5.При отсутствии входного воздействия в нелинейных системах в зависимости от начальных условий может быть несколько устойчивых состояний или устойчивых предельных циклов.
6.В нелинейных системах возможно резкое (скачкообразное) изменение амплитуды и (или) частоты выходной величины при плавном изменении входной величины или при плавном изменении какого-либо параметра системы.
2.2. Типовые нелинейные звенья и их уравнения
В результате математического описания нелинейных САУ составляется структурная схема, содержащая линейные (точнее, линеаризованные) и существенно нелинейные звенья. При описании последних, в свою очередь, осуществляется идеализация с целью упрощения этого описания вплоть до перехода в большинстве случаев к типовым нелинейностям.
56
Все нелинейности можно подразделить на следующие виды.
1.Статические нелинейности. Все статические характеристики являются однозначными. К типовым нелинейностям этого типа можно отнести:
а) релейную характеристику, б) характеристику усилителя с ограничением,
в) характеристику усилителя с зоной нечувствительности.
2.Динамические нелинейности. К нелинейностям такого типа относятся:
а) петля гистерезиса, б) люфт, в) упор,
г) динамические нелинейности с нелинейными дифференциальными уравнениями, включающими произведения или нелинейные функции производных.
3.Нелинейности структуры.
4.Нелинейности логического типа.
5.Нелинейности самонастройки и оптимизации.
6.Нелинейные законы управления:
а) функциональные, б) логические,
в) параметрические, когда имеются нелинейные функции от параметров, входящих в математическое описание алгоритма управления.
Рассмотрим некоторые типовые нелинейности более подробно.
57
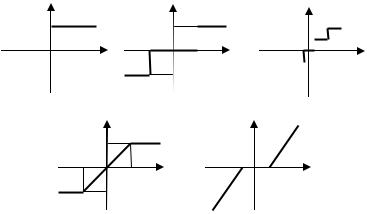
2 . 2 . 1 . Однозначные нелинейно сти
Релейную характеристику (рис. 2.1, а) можно описать соотношениями
|
c |
при x1 |
> 0, |
|
x2 |
|
при x1 |
= 0, |
(2.2.1) |
= 0 |
||||
|
− c при x |
< 0, |
|
|
|
|
1 |
|
|
где x1 – входной сигнал нелинейного звена, x2 – выходной сигнал. Разновидностью характеристики (2.2.1) обладает трёхпозиционное
реле или реле с зоной нечувствительности (рис.2.1, б) с уравнением
|
c |
при x1 > a, |
|
||||
x2 |
= 0 |
при |
|
x1 |
|
≤ a, |
(2.2.2) |
|
|
||||||
|
− c |
при x |
|
< −a. |
|
||
|
|
1 |
|
|
|
||
Дальнейшим развитием подобных характеристик являются многоступенчатые характеристики (рис. 2.1, в), получающиеся в результате квантования сигнала по уровню (амплитуде).
Усилитель с ограничением имеет идеализированную характеристику, изображенную на рис. 2.1, г. Аналитический вид этой зависимости
|
c |
при x1 > a, |
||
|
|
при |
|
≤ a, |
x2 |
= kx1 |
x1 |
||
|
− c |
при x |
< −a. |
|
|
|
1 |
|
|
Идеализированная характеристика усилителя с зоной нечувствительности приведена на рис. 2.1, д и задана соотношением
58
|
|
k |
(x |
− a) |
при x |
> a, |
|
|
|
|
|
|
|||||
|
|
|
1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
||
|
x2 |
= 0 |
|
|
|
при |
x1 |
≤ a, |
|
|
|
|
|
|
|||
|
|
k |
(x |
+ a) |
при x |
< −a. |
|
|
|
|
|
|
|||||
|
|
|
1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
||
|
x2 |
|
|
x2 |
|
|
|
|
|
|
|
|
|
x2 |
|||
с |
-а |
с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 |
|
|
а |
|
x1 |
|
|
|
|
|
|
|
|
|
x1 |
|
|
-с |
|
|
-с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
а |
|
|
б |
|
|
|
|
|
|
|
|
в |
|||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
x2 |
|
|
|
|
|
|
|
x2 |
|
|
|
|
|
|
||
|
с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-а |
|
|
|
|
|
-а |
|
|
|
|
|
|
||||
|
а |
x1 |
|
|
|
|
а |
|
|
|
x1 |
||||||
|
-с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
г |
|
|
|
|
|
|
|
д |
|
|
|
|
|
|
||
Рис. 2.1. Статические нелинейности
Разумеется, возможны и различные комбинации рассмотренных характеристик. Все подобные характеристики являются кусочнолинейными.
2 . 2 . 2 . Двузначные хар актеристики
Петля гистерезиса (рис. 2.2, а) является типичным представителем двузначных характеристик. Такой вид имеет, например, кривая намагничивания в катушке со стальным сердечником. Петля гистерезиса относится к динамическим нелинейностям, поскольку значение функции зависит не только от самого аргумента, но и от скорости его изменения
59
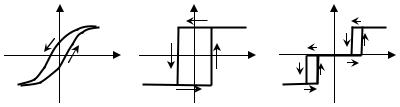
(точнее, от знака скорости). Механическое реле со стальным сердечником также имеет двузначную характеристику с гистерезисом. Например, в двухпозиционном поляризованном реле при его симметричной настройке переключение контактов в одном направлении происходит при вполне определенном напряжении, а переключение в обратном направлении происходит при таком же напряжении, но противоположного знака (рис. 2.2, б). Реальное трёхпозиционное реле также обладает двузначной характеристикой с гистерезисом (рис. 2.2, в).
x2 |
x2 |
x2 |
|
|
|
x1 |
x1 |
x1 |
а |
б |
в |
Рис. 2.2. Двузначные характеристики
2 . 2 . 3 . Мно гозначные хар актер истики
К многозначным характеристикам относится характеристика звена типа «люфт» или «сухое трение». Такая нелинейность часто встречается в механических системах и связана она с наличием зазоров в системе передач вращательного или поступательного движения, либо с сухим (кулоновым) трением в таких системах. Один из примеров механической системы с нелинейностью типа «люфт», приведен на рис. 2.3, а.
Ведомый (вторичный) вал не начнет вращаться, пока не будет выбран
люфт между вращающейся частью ведущего (первичного) вала и дужкой, 60