Материал: 2501
|
|
|
|
|
|
|
|
|
Сравнительный анализ показателей |
|
|
|
Таблица 3 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
Критерий |
|
|
|
Базовый склад |
|
|
Проектный склад |
|
|||||
|
|
|
|
|
|
|
|
|
|
Качество логистического сервиса |
|
|
|
|
|
||||
|
Точность сборки заказа, % |
|
98,0 |
|
|
|
|
99,7 |
|
||||||||||
|
|
|
|
|
|
|
|
Продолжительность логистического цикла |
|
|
|
||||||||
|
реднее время комплектации и |
|
30 |
|
|
|
|
5 |
|
||||||||||
|
выдачи заказа, мин. |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
Производительность |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
Обработка документов, |
|
Все операции автомати- |
|
||||
|
Объём операц й |
|
|
|
поиск, приемка и |
|
|
зированы, проведение |
|
||||||||||
|
|
|
|
отгрузка осуществля- |
|
складских операций |
|
||||||||||||
|
и |
|
|
||||||||||||||||
|
лась вручную |
|
|
|
ускорено в 4-5 раз |
|
|||||||||||||
С |
|
|
|
|
|
|
|
||||||||||||
|
Грузооборот склада, т: |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
Г |
Тобор |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
руб |
|
|
|
|
6000 |
|
|||||||||
|
|
|
|
Ч В |
|
|
|
|
|
|
|||||||||
|
|
ср |
|
|
|
|
|
4393 |
|
|
|
|
|
||||||
|
Тобор - товарооборот за месяц, |
.; |
|
|
|
|
|
|
|
|
|||||||||
|
Сср – средняя сто мость 1 т груза, |
|
|
|
|
|
|
|
|||||||||||
|
руб./т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Производ тельность труда: |
|
|
|
|
|
|
|
|
|
|||||||||
|
Пр.раб |
СГО |
, |
|
А |
|
|
|
|
|
|||||||||
|
|
|
|
|
1,6 |
|
|
|
|
3,6 |
|
||||||||
|
СГО – складской грузоо орот; |
|
|
|
|
|
|||||||||||||
|
Ч – численность персонала и |
|
|
|
|
|
|
|
|
|
|||||||||
|
техники; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
В – временной интервал |
|
|
|
|
|
|
|
|
|
|
||||||||
|
Коэффициент оборачиваемости |
|
|
|
|
|
|
|
|
|
|||||||||
|
грузов на складе (месячный): |
0,62 |
|
|
|
|
0,85 |
|
|||||||||||
|
Kобор. |
Г |
общ. |
|
, |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
V |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
Показатель работы транспорта |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Метод |
|
Алгоритм |
|
|
|
|
|
|
|
|
Показатель |
|
|
|
Д |
|
||||||||
|
|
|
|
|
|
|
|
|
Обозначение |
|
транспортного |
|
Свира |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
моделирования |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Длина маршрута, км |
|
|
|
Lм |
|
|
130 |
|
102 |
|
||||||||
|
Коэффициент использования |
|
β |
|
|
0,52 |
|
0,7 |
|
||||||||||
|
пробега |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
И |
|
||||||||||
|
Коэффициент использования |
|
γ |
|
|
|
|
||||||||||||
|
грузоподъемности |
|
|
|
|
|
0,75 |
0,91 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
В результате расчетов получено, что модернизация складского комплекса позволит повысить точность сборки заказа до 99,7 %, увеличить грузооборот склада до 30 %. Срок окупаемости при внедрении технологии «Pick-to-light» в складской комплекс с годовым грузооборотом 5000-6000 тонн составляет 1 – 1,5 года.
196
Библиографический список
1. Покарева Н.Г. Стратегия развития логистических операторов при формировании конкурентоспособности рынка логистических услуг в России. : автореферат диссертации доктора экономических наук / Н.Г. Покарева – М.: Изд-во МГУ, 2014. – 20 с.
2. |
авин Г.В. Влияние логистики на деятельность предприятия / экономика, |
|
общество, человек: теория, методология, реальность, Уральский государственный |
||
экономический университет/ Г.В.Савин – Екатеринбург, 2015. – С. 200-204. |
||
3. |
Гадж нск й А.М. Логистика: учебник для студентов высших учебных |
|
заведений. – 9-е зд., перераб. и доп./ А.М. Гаджинский – М.: Издательско-торговая |
||
корпорац я «Дашков Ко», 2014. |
|
|
4. |
аф на Д.М. Лог ст ка:учебно-методическое пособие /Д.М.Сафина. – Казань: |
|
Казанский (пр волжск й) федеральный университет; 2013.- 108 с. |
||
С |
запасами в логистике: методы, модели, |
|
5. |
Гр горьев М.Н. |
|
информацУправлениеонные технолог : учеб. пос. для вузов / М.Н Григорьев, А.П Долгов,
УДК 656.1
.А.Уваров Пбб.: Издательск й дом «Бизнес-пресса», 2014. 368 с.
ПО ИНФОРМАЦИОННО-ТЕЛЕКОММУНИКАЦИОННОМУ
К ВОПРОСУВЗАИМОДЕЙСТВИЮАВТОМ ТИЗ ЦИИ ЭЛЕКТРОННЫХ СИСТЕМ УПРАВЛЕНИЯ ВТОМОБИЛЬНОЙ ТЕХНИКИ
Р.Н. СафиуллинД, проф.; М. . Керимов, проф.; А.С. Григорьева, студент,
ФГБОУ ВО «СПбГ СУ», г. Санкт-Петербург
Аннотация. В данной статье предложены комплекс технических
решений по формированию научно-исследовательского комплекса |
|||||
для реализации концепции интеллектуального автомобиля на основе |
|||||
автоматизированного и автоматического взаимодействия всех |
|||||
транспортных субъектов в реальном масштабе времени на |
|||||
адаптивных |
принципах. |
С |
этойИцелью разработаны |
||
автоматизированная система стендовых испытаний узлов и агрегатов |
|||||
автомобильной техники, а также испытательный имитационный |
|||||
стенд электронных блоков систем управления транспортных средств, |
|||||
усовершенствованный |
программно-аппаратный |
комплекс |
|||
автоматической |
фотовидеофиксации |
административных |
|||
правонарушений в сфере |
обеспечения |
безопасности |
дорожного |
||
197
движения автоматизированных систем управления транспорта. Для внедрения указанных технических решений необходимо иметь современный лабораторно-исследовательский комплекс.
Abstract. In this article we propose a set of technical solutions for the
formation of a research complex for the implementation of the concept of intelligent car based on auto-matirovanie and automatic interaction of all Сtransport entities in real time on the adaptive principles. For this purpose we developed an automated system bench tests components and assemblies of automotive vehicles, and test stand simulation of electronic components of control systems of vehicles, an improved hardware-software complex of automatic fotovideofiksatsii administrative offences in the sphere of ensuring road traffic safety of automated control systems of transport. To implement these technical solutions must have modern laboratory and
research complex. |
|
|
|
|
|
|
|
|
|
||
Ключевые |
слова: |
Интеллектуальные |
бортовые |
системы, |
|||||||
автомат з рованная |
система стендовых испытаний, средства |
||||||||||
иавтомат ческой фотовидеофиксации нарушений правил дорожного |
|||||||||||
движен я. |
|
|
|
|
|
|
|
|
|
|
|
Keywords: Intelligent onboard systems, automated bench tests, automatic |
|||||||||||
fotovideofiksatsii violations of traffic rules. |
|
|
|
|
|
||||||
Наиболее перспективным направлением научных исследований в |
|||||||||||
настоящее |
время |
является |
разработка |
|
технических |
решений, |
|||||
обеспечивающих |
возможность |
Д |
|
||||||||
|
интеллектуального |
взаимодействия |
|||||||||
единичных дорожныхбАтранспортных средств между собой, или с |
|||||||||||
транспортным потоком, либо между объектами транспортно-дорожной |
|||||||||||
инфраструктуры посредством информационных и коммуникационных |
|||||||||||
технологий. Целью таких разработок является повышение эффективности |
|||||||||||
|
|
|
|
|
|
|
И |
||||
использования наземного транспорта, повышение безопасности движения, |
|||||||||||
снижение нагрузки на окружающую среду и дорожное полотно [1]. |
|
||||||||||
Изменение статуса транспортной единицы от независимого, |
|||||||||||
самостоятельного, непредсказуемого субъекта дорожного движения в |
|||||||||||
сторону |
«активного», |
предсказуемого |
|
субъекта |
транспортно- |
||||||
информационного |
|
пространства |
осуществляется |
на |
|
основе |
|||||
автоматизированного |
и |
автоматического |
|
взаимодействия |
всех |
||||||
транспортных субъектов в реальном масштабе времени на адаптивных принципах [2, 3]. В настоящее время бортовые системы транспортных средств существенно отличаются от простейших встроенных устройств контроля технического состояния механизма или узла АТС тем, что они производят анализ поступающей информации и предупреждают определенную аварийную ситуацию, в которой оказалось
198
автотранспортное средство. Основная концепция интеллектуального транспортного средства заключается в его способности постоянно осуществлять контроль за действиями водителя, поведением автомобиля и состоянием окружающей среды, а также помогать водителю эффективно и безопасно управлять автомобилем в сложных дорожных ситуациях [4].
|
Для разработки и совершенствования принципов функционирования |
|||||||||||||
Санкт |
|
|
|
|
|
|
|
|
|
|
|
|||
современных электронных систем бортового управления транспортными |
||||||||||||||
средствами и их информационно-телекоммуникационного взаимодействия |
||||||||||||||
на |
базе |
|
-Петербургского |
государственного |
архитектурно- |
|||||||||
строительного |
ун верс тета |
(СПбГАСУ) |
была создана |
лаборатория |
||||||||||
использован |
|
|
|
|
|
|
|
|
|
|||||
«Интеллектуальные бортовые системы транспортных средств». В течение |
||||||||||||||
ряда лет в данной лаборатории проводятся исследовательские работы с |
||||||||||||||
|
ем разра отанных автоматизированной системы контроля |
|||||||||||||
технического состоян я двигателя внутреннего сгорания, а также |
||||||||||||||
имитационного |
стенда ортовой |
электроники |
и |
технических |
средств |
|||||||||
контроля транспортных средств. На данные технические решения в |
||||||||||||||
настоящее времяполучены ряд патентов. |
|
|
|
|
|
|
|
|||||||
|
Знач тельную |
часть |
|
электрооборудования |
ДВС |
составляют |
||||||||
электронные с стемы управления. В этой связи один из лабораторных |
||||||||||||||
комплексов предназначен для изучения способов управления с помощью |
||||||||||||||
автоматизированной системы стендовых испытаний ДВС. При разработке |
||||||||||||||
лабораторных |
стендов |
учитывалось |
соответствие |
оборудования |
||||||||||
современным требованиям |
и |
тенденциям |
с |
точки |
зрения |
принципов |
||||||||
|
|
|
|
|
|
Д |
|
|||||||
организации дорожного движения и использования распространённого |
||||||||||||||
техническогобАи программного обеспечения, чтобы получаемые |
||||||||||||||
обучающимися знания имели универсальный базовый характер. Созданная |
||||||||||||||
материально-техническая база лаборатории позволила расширить ее |
||||||||||||||
исследовательские |
возможности |
за |
счет |
разработки |
систем |
контроля |
||||||||
|
|
|
|
|
|
|
|
И |
||||||
технического состояния транспортного средства и методики оценки |
||||||||||||||
эффективности |
|
функционирования |
средств |
|
автоматической |
|||||||||
фотовидеофиксациинарушений ПДД [6,7]. |
|
|
|
|
|
|
|
|||||||
|
Автоматизированная система благодаря модульной организации и |
|||||||||||||
широкому набору базовых интерфейсов поддерживает возможность выбора |
||||||||||||||
различных сетей, что обеспечивает её применение в самых разнообразных |
||||||||||||||
приложениях. При реализации стенда ставилась задача обеспечивать его |
||||||||||||||
работу не только с математическими и программными моделями, |
но и с |
|||||||||||||
физическими, т.е. контроллер должен управлять реальным ДВС в режиме «On-line». Фактически стенд представляет собой физическую модель, отражающую типовую структуру управления ДВС в рамках АСУ. На основе такого технического обеспечения могут решаться самые разнообразные задачив соответствиис заложеннымпрограммным обеспечением[8].
199
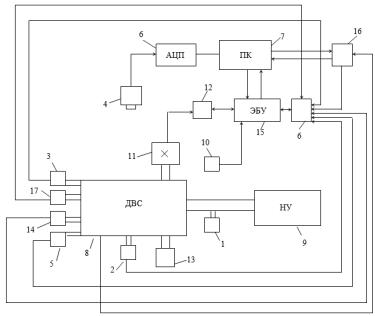
Компоненты разработанных технических решений по управлению ДВС представлены на лабораторном стенде, структура которого приведена на рис. 1. Автоматизированная система контроля технического состояния двигателя внутреннего сгорания работает следующим образом. Находящуюся на дистанционном пульте управления 16 кнопку включения
следует удерживать в течение трех секунд. При этом происходит подача ДВСпитания на персональный компьютер 7, одновременно на запуск ДВС 8 и
ЭБУ 15. Осуществляется запуск ДВС 8, ПК 7 обрабатывает данные, полученные с ЭБУ 15, с помощью программного обеспечения распознает
сигналы 8. Регулировка – калибровка, блока электронного управленПрия (ЭБУ) 15 осуществляется с помощью программного обеспечен я дополн тельной кнопкой «Программирование ЭБУ».
этом на панели нео ходимо включить монитор персонального компьютера 7, который ото ражает все исходные и регулировочные параметры, характербАст ки изменяемых параметров в виде аналитических зависимостей граф ков.
Д
Рис. 1. Автоматизированная система контроляИтехнического состояния двигателя внутреннего сгорания:
1 - датчик числа оборотов коленчатого вала; 2 - датчик детонации; 3 - датчик уровня расхода топлива; 4 - датчик давления в цилиндре; 5 - дымомер; 6 - аналого-цифровой преобразователь (АЦП);
7 - персональный компьютер (ПК); 8 - испытуемый двигатель; 9 - нагружающее устройство; 10 - датчик положения коленчатого вала (КВ);
11 - датчик концентрации кислорода;
12 - клапан управления датчика концентрации кислорода;
13 - газоанализатор вредных выбросов в продуктах сгорания; 14 - датчик массового расхода воздуха; 15 - блок электронного управления;
16 - дистанционный пульт управления; 17 - датчик положения дроссельной заслонки
200