Материал: 2426
90° по отношению друг к другу, коромысловый механизм погружения заземлителей в землю, приводимый в действие вручную. При работе устройства на его основание должны встать один, а при необходимости два оператора и вручную перемещать рычаг коромыслового механизма погружения заземлителей.
Недостатками данной системы являются: ручной привод устройства, необходимость для одного или двух операторов выступать в качестве нагружающей устройство массы и одновременно в качестве источника механических усилий. Затруднено использование подобного устройства для заземления мобильного ГПК, поскольку оно требует отдельного участка рядом с машиной для размещения, необходимы дополнительные затраты времени на проводное электрическое соединение устройства и ГПК перед началом работы и демонтаж данного соединения после окончания работы. Устройство не предназначено для выполнения функции повышения устойчивости ГПК в процессе работы, так как не связано с последним жесткой механической связью.
Задачей предлагаемой системы является заземление мобильного ГПК с одновременным повышением его устойчивости при помощи механизма, конструктивно связанного с гидравлическими опорами и приводимого в действие гидроцилиндрами, производящими вывешивание машины на опорах.
При этом достигаются следующие технические результаты [160]:
1.Ликвидация ручного труда в процессе заземления.
2.Снижение времени на заземление мобильного ГПК, совмещение заземления с вывешиванием на гидравлических опорах.
3.Сокращение площади на поверхности земли, занимаемой заземляющим устройством.
4.Повышение устойчивости мобильного ГПК против опрокидывания в рабочем режиме.
Указанные технические результаты достигаются тем, что электроды в количестве четырех штук (по числу гидравлических опор) имеют форму изогнутых стержней, оси которых расположены по дуге окружности и соединены с прямыми стержнями круглого сечения, направленными по радиусу соответствующей окружности. Механизм погружения каждого электрода в грунт включает в себя ползун с двумя степенями свободы относительно электрода, храповой механизм соединения электрода и опоры-башмака, гидравлический привод поступательного перемещения в виде гидроцилиндра со штоком; электроды имеют электрический контакт и механическое соединение с гидравлическими опорами
иопорной платформой мобильного ГПК. Используются уже имеющие-
345
ся на ГПК гидроцилиндры опор, работа устройства совмещается с вывешиванием машины на гидравлических опорах.
2 |
2 |
|
12 |
|
|
|
12 |
|
4 |
11 |
|
11 |
5 |
|
|
10 |
|
10 |
9 |
|
9 |
7 |
8 |
8 7 |
||
|
2 |
2 |
12 |
|
|
|
|
12 |
|
3 |
11 |
|
|
11 |
6 |
|
|
10 |
|
|
10 |
9 |
|
9 |
7 |
8 |
1 |
8 7 |
||
|
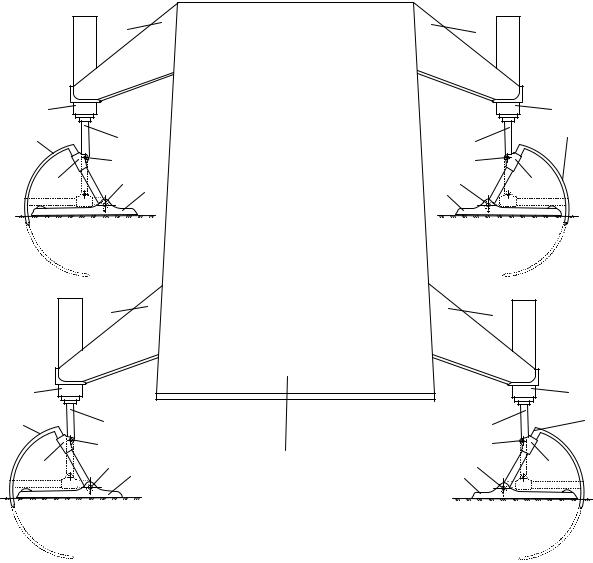
Рис. 6.16. Система заземления и повышения устойчивости мобильного ГПК с гидравлическими опорами
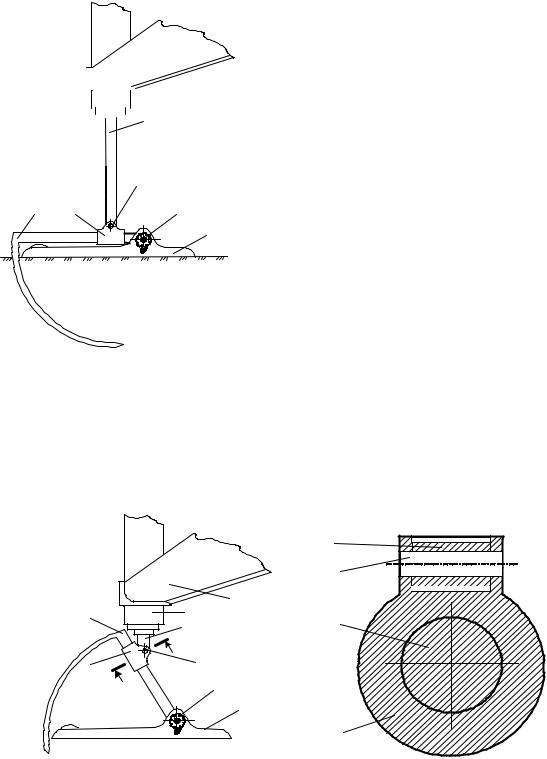
На рис. 6.16 показан общий вид системы заземления и повышения устойчивости мобильного ГПК с гидравлическими опорами. На рис. 6.17 показаны все элементы системы для отдельной опоры в рабочем положении при полностью погруженном в грунт электроде, на рис. 6.18 – все элементы системы для отдельной опоры в транспортном положении (А-А – сечение ползуна) [160].
Конструкция включает опорную платформу ГПК 1, соединенные с ней по углам кронштейны поворотных, откидных или выдвижных гидравлических опор 2, механизмы погружения электродов и погру-
346
 2
2 12
12  11
11Система работает следующим образом [160]. Перед началом работы ГПК оператор на пульте управления переводит тумблер в положение включения устройства, после чего выполняется выдвижение штоков 11 гидроцилиндров 12. Электроды 3, 4, 5, 6 при этом находятся в максимальном верхнем положении относительно опор-башмаков 8. Храповые механизмы шарниров 7 удерживают опоры-башмаки 8 в горизонтальном положении их подошв. После контакта опорбашмаков 8 с грунтом вертикальное усилие штоков 11 перераспределяется между опорами-башмаками 8 и электродами 3, 4, 5, 6, в результате чего электроды начинают заглубляться в грунт вплоть до упора в выступы опор-башмаков 8. При дальнейшем выдвижении штоков 11 всю нагрузку воспринимают опоры-башмаки 8, погружению которых в грунт препятствует их значительная площадь, происходит подъем опорной платформы 1, вывешивание ее на опорах, горизонтирование. Храповые механизмы шарниров 7 после заглубления электродов 3, 4, 5, 6 препятствуют их обратному повороту. В случае возникновения аварийной ситуации, когда возможен отрыв какойлибо из опор ГПК от грунта (если нормальная реакция на опоре равна или близка к нулю), отрыв потребует вырывания из грунта соответствующего криволинейного электрода, причем без возможности обратного поворота последнего. Для этого потребуется дополнительное усилие отрыва.
Для демонтажа системы храповые механизмы шарниров 7 отключаются, затем выполняется втягивание штоков 11 гидроцилиндров 12. Электроды 3, 4, 5, 6 после контакта с грунтом ходовых элементов машины за счет степеней подвижности механизма их погружения выходят на поверхность полным обратным поворотом вокруг осей шарниров 7 либо неполным поворотом с одновременным вырыванием из грунта за счет усилий гидроцилиндров. Демонтаж системы совмещается со снятием ГПК с гидравлических опор.
Заключение. Использование в предлагаемой системе гидроцилиндров позволяет устранить ручной труд при заземлении ГПК, а также сократить время монтажа и демонтажа системы, совместив его с вывешиванием машины на гидравлических опорах и снятием машины с опор. Причем используются уже имеющиеся на ГПК гидроцилиндры опор, не происходит излишнего усложнения конструкции. Использование новых элементов (электродов криволинейной формы в виде дуг окружностей, ползунов, храповых механизмов шарниров) позволяет расположить электроды в грунте наклонно и криволинейно, блокировать их обратный поворот и повысить таким образом устой-
348
чивость ГПК против опрокидывания. Расположение элементов системы на уже имеющихся гидравлических опорах ГПК позволяет сократить площадь, занимаемую заземляющим устройством.
Система предназначена для многократного постоянного использования и может использоваться в мобильных ГПК с выносными, выдвижными или откидными гидравлическими опорами как при наличии, так и при отсутствии дополнительных прокладок под опорамибашмаками [160].
Система заземления и повышения устойчивости мобильного ГПК с винтовыми опорами
Вторым вариантом изменения конструкции опор ГПК, обеспечивающим одновременно заземление и значительное повышение устойчивости, является использование винтовых опор, закручиваемых в грунт. Данное техническое решение целесообразно применять для ГПК, оснащенных винтовыми механизмами вывешивания машины на опорах [161].
Из известных технических решений наиболее близким по технической сущности к предлагаемому является устройство для погружения в грунт винтовых электродов [159]. Оно содержит электрод в форме винта с ходовой упорной резьбой, направленной в сторону его погружения в грунт, опорную плиту для операторов, на которой закреплена направляющая гайка с внутренней упорной резьбой. Винтовой электрод имеет болтовой зажим с рукоятками для вращения.
При работе устройства на его опорную плиту должен встать оператор, вдавливая своей массой ее зубья в землю, и вручную при помощи рукояток ввинчивать электрод сначала в направляющую гайку, а затем в грунт. Опорная плита с гайкой могут быть сняты с электрода после его ввинчивания в грунт. Демонтаж устройства производится в обратной последовательности.
Недостатками известного заземляющего устройства являются: ручной привод устройства, необходимость для оператора выступать в качестве нагружающей устройство массы и одновременно в качестве источника механических усилий. Затруднено использование подобного устройства для заземления мобильного ГПК, поскольку оно требует отдельного участка рядом с машиной для размещения, необходимы дополнительные затраты времени на проводное электрическое соединение устройства и ГПК перед началом работы и демонтаж данного соединения после окончания работы. Вертикально заглубленный винтовой электрод с ходовой упорной резьбой на поверхности при заглублении в грунт имеет невысокую несущую способность на выдер-
349