Материал: 2426
гивающие нагрузки, близкую с аналогичным гладким электродом цилиндрического сечения того же диаметра. Устройство не предназначено для выполнения функции повышения устойчивости ГПК в процессе работы, так как не связано с последней жесткой механической связью.
Задачей системы является заземление мобильного ГПК с одновременным повышением его устойчивости при помощи механизмов типа винт-гайка, конструктивно связанных с винтовыми опорами, одновременно выступающими в качестве электродов, погружаемых в грунт, и приводимых в действие гидромоторами опор при вывешивании на них машины.
2 |
2 |
4 |
5 |
|
2 |
2 |
3 |
1 |
6 |
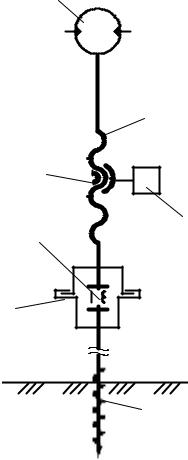
Рис. 6.19. Система заземления и повышения устойчивости мобильного ГПК с винтовыми опорами
При этом достигаются технические результаты, аналогичные использованию конструкции гидравлических опор с изогнутыми стержнями, описанной выше. Кроме того, дополнительно достигается следующий технический результат: более высокая несущая способность
350
электродов на выдергивающие нагрузки, надежная фиксация электро- |
|||||
дов в грунте [161]. |
Указанные технические результаты |
||||
8 |
|||||
М |
достигаются тем, что винтовые электро- |
||||
ды, одновременно являющиеся опорами, |
|||||
|
|||||
|
на которых вывешивается ГПК в коли- |
||||
|
честве четырех штук, при помощи со- |
||||
7 |
единительных механизмов, каждый из |
||||
|
которых включает упорный двухсто- |
||||
11 |
ронний |
подшипник |
и |
управляемую |
|
муфту, соединены с соответствующими |
|||||
2 |
ходовыми винтами. На винтовых элек- |
||||
тродах имеются лопасти, диаметр кото- |
|||||
10 |
рых значительно превышает диаметр |
||||
|
|||||
|
стержня электрода. Каждому из ходовых |
||||
9 |
винтов |
сообщается |
вращение при по- |
||
мощи отдельного гидромотора. |
|||||
|
|||||
|
На рис. 6.19 приведена схема сис- |
||||
|
темы заземления и повышения устойчи- |
||||
|
вости мобильного ГПК с винтовыми |
||||
3 |
опорами. На рис. 6.20 показана принци- |
||||
|
пиальная схема устройства для отдель- |
||||
Рис. 6.20. Элементы системы |
ной опоры. |
|
|
||
Система включает опорную плат- |
|||||
заземления и повышения ус- |
форму ГПК 1, соединенные с ней по уг- |
||||
тойчивости мобильного ГПК с |
лам кронштейны поворотных, откидных |
||||
винтовыми опорами для от- |
или выдвижных гидравлических опор 2 |
||||
дельной опоры в рабочем по- |
|||||
ложении при погруженном в |
и погружаемые винтовые электроды 3, |
||||
грунт электроде |
4, 5, 6, имеющие форму буравов (см. |
||||
|
рис. 6.19). Каждый из электродов (3 на |
||||
рис. 6.20) через соединительный механизм двух валов связан со своим |
|||||
ходовым винтом 7, приводимым во вращение отдельным гидромото- |
|||||
ром 8. Соединительный механизм двух валов для каждой опоры |
|||||
включает упорный двухсторонний подшипник 9 и управляемую муф- |
|||||
ту 10. Оси вращения электрода 3 и ходового винта 7 располагаются на |
|||||
одной прямой линии. Ходовой винт 7 образует винтовую пару с не- |
|||||
подвижной относительно опорной платформы 1 направляющей гай- |
|||||
кой 11, жестко связанной с кронштейном опоры 2. |
|
|
|||
Система работает следующим образом. Перед началом работы ГПК оператор на пульте управления переводит тумблер в положение
351
включения устройства, после чего включаются четыре управляемые муфты 10, одновременно гидромоторами 8 выполняется вращение соответствующих им ходовых винтов 7 в направлении вниз, в результате чего четыре винтовых электрода 3, 4, 5, 6 получают вращательное и одновременно поступательное по направлению к грунту перемещения. После контакта с грунтом электроды погружаются в него ввинчиванием. После достижения электродами 3, 4, 5, 6 заданной глубины погружения оператор отключает управляемые муфты 10. Соединительный механизм каждого винтового электрода и соответствующего ему ходового винта 7 передает вращение с вала на вал только при включенном состоянии муфты 10. Осевое усилие в обоих направлениях передается при помощи упорного двухстороннего подшипника 9 как при выключенном, так и при включенном состояниях муфты 10. Гидромоторы продолжают вращать ходовые винты 7, в результате чего направляющие гайки 11 поднимают соответствующие кронштейны опор 2. Происходит подъем опорной платформы ГПК 1, вывешивание ее на опорах, горизонтирование. Погруженные в грунт винтовые электроды 3, 4, 5, 6 через упорные двухсторонние подшипники 9 жестко связаны в осевом направлении с ходовыми винтами 7, кронштейнами опор 2 и опорной платформой 1, что повышает устойчивость мобильного ГПК в рабочем режиме.
Для демонтажа устройства гидромоторы 8 включаются в обратном направлении вращения при выключенных муфтах 10, происходит опускание платформы ГПК 1 до касания грунта всеми ходовыми элементами машины, после чего включаются муфты 10, и при дальнейшем вращении гидромоторов винтовые электроды 3, 4, 5, 6 извлекаются из грунта вывинчиванием. Демонтаж устройства совмещается со снятием ГПК с винтовых опор.
Использование новых элементов (гидромоторов) позволяет устранить ручной труд при заземлении ГПК, а также сократить время монтажа и демонтажа устройства за счет большей производительности гидромоторов по сравнению с ручным завинчиванием. Причем используются уже имеющиеся на ГПК гидромоторы механизма вывешивания на винтовых опорах. Использование новых элементов (соединительных механизмов каждого винтового электрода и соответствующего ему ходового винта, включающих упорный двухсторонний подшипник и управляемую муфту) позволяет сократить время монтажа и демонтажа устройства, совместив его с вывешиванием ГПК на винтовых опорах и снятием машины с опор. Расположение элементов
352
системы на уже имеющихся опорах машины позволяет сократить площадь, занимаемую заземляющим устройством.
Описанная система с винтовыми опорами, как и система с гидравлическими опорами, предназначена для многократного постоянного использования и может использоваться в мобильных ГПК с выносными, выдвижными или откидными винтовыми опорами [161].
Самоходный двухстреловой кран Разработка относится к области машиностроения и может ис-
пользоваться в качестве грузоподъемного механизма в различных областях народного хозяйства, в частности для перегрузки крупногабаритных грузов и монтажа длинномерных конструкций.
Известно устройство в виде комплекса из двух одностреловых грузоподъемных кранов, используемое для перемещения общего груза [163]. Такое устройство позволяет осуществлять подъем и перемещение в конечное положение крупногабаритных грузов и длинномерных металлических конструкций, обеспечивая при этом заданные координаты угловой ориентации груза в пространстве.
Однако известное устройство обладает следующими недостатками: необходимо обеспечить согласованную работу двух крановщиков и сигнальщика, в сложных случаях необходимо крановщиков и сигнальщика обеспечить двусторонней радиосвязью, перед работой необходимо обеспечить точную привязку каждого крана к заданным точкам на площадке, в процессе работы необходимо одновременно производить контроль углов отклонения двух грузовых канатов от плоскости подъема для каждого крана, углов отклонения грузовых канатов от гравитационной вертикали, а также углов наклона опорных платформ и ходовой части (шасси) двух кранов к горизонту [169].
При этом возможны: неравномерное распределение нагрузок на краны, расцепление груза со стропами, раскачивание груза при наклонном положении канатов, вызванные несогласованными действиями крановщиков. Это приводит к увеличению времени работы и количества работающего персонала. Затруднена автоматизация процесса вследствие совместного использования двух отдельно стоящих крановых механизмов.
Из известных технических решений наиболее близким по технической сущности к заявляемому объекту является двухстреловой дер- рик-кран [23]. Он содержит: горизонтальную опорную раму с четырьмя опорами (ходовыми тележками, аутригерами); поворотную платформу; две мачты; несколько стоек-укосин; две стрелы, два механизма подъема груза (привода), состоящих каждый из грузовой ле-
353
бедки и каната; поддерживающие и направляющие канат-элементы (канатные блоки, поддерживающие скобы и т.п.); грузозахватные приспособления; механизмы подъема двух стрел; механизм поворота крана; подвесные рештования.
Деррик-кран устанавливают стационарно на фундаментах, башенных надстройках, плавучих опорах или используют в качестве передвижного при перемещении по монтируемой конструкции (пролетному строению, ферме).
Горизонтальная рама прямоугольной формы обеспечивает опирание крана на пролетное строение. Ширину и длину горизонтальной рамы устанавливают в каждом отдельном случае с учетом условий размещения крана на монтируемой конструкции и схем передачи на опорные элементы нагрузок и анкерных усилий крана. Необходимо заанкеривание стационарного крана за собираемую конструкцию или специальные фундаменты. На раме сверху размещается поворотная платформа, на которую опираются две вертикально расположенные мачты и две стрелы. В некоторых конструкциях деррик-кранов поворотная платформа отсутствует, при этом мачты и стрелы опираются непосредственно на раму. Опорная точка каждой стрелы находится в основании соответствующей мачты. Каждую мачту поддерживают в верхней части по две или три стойки-укосины, жестко соединенные с рамой. Вместо жестких стоек-укосин могут использоваться канатные растяжки. Механическое и электрическое оборудование деррик-крана смонтировано на раме и поворотной платформе.
Кран передвижной конструкции оснащен подвесными рештованиями, закрепляемыми к мачтам крана через специальную траверсу. Они занимают по отношению к пролетному строению объемлющее положение, обеспечивая доступ к узлам ферм. Возможно наращивание длины стрел до начала работы.
При работе передвижного деррик-крана колеса ходовых тележек, на которые опирается рама, разгружаются посредством установки тележек на аутригеры. Нагрузки от стрел и мачт передаются на поворотную платформу и опорно-поворотное устройство с приводом, которое обеспечивает одновременный поворот в плане двух мачт и стрел крана относительно рамы и пролетного строения в процессе работы. В случае отсутствия поворотной платформы поворот в плане двух мачт и стрел крана не осуществляется. При помощи канатных приводов в процессе работы осуществляется также подъем-опускание стрел и подъем-опускание грузовых канатов. Сочетание указанных
354