Материал: 2426
щенных координат вне прибора ОНК-160С (на внешнем ПК) путем численного дифференцирования:
vi(tj)= (qi(tj) – qi(tj–1) ) / (tj – tj–1), |
(6.46) |
где j [1;7276] – номер кадра информации в рассматриваемом эксперименте; i [7;10] – номер управляемой обобщенной координаты qi (7 – угол поворота поворотной колонки; 8 – угол подъема стрелы; 9 – длина стрелы; 10 – длина грузового каната); tj – значение времени для кадра j.
а) |
б) |
в) |
г) |
Рис. 6.13. Интерфейс программы считывания и анализа информации РП ОНК-160С: а – вкладка основной информации о кране; б – вкладка графиче-
ской информации; в – вкладка покадровой информации; г – покадровая оперативная информация, перенесенная в MS Excel при помощи программы
RPToExcel
В описываемом эксперименте в качестве примера анализировалось время непрерывной работы автокрана в течение 6 ч 15 мин (одна рабочая смена). Минимально возможный покадровый шаг квантова-
340

ния времени (tj – tj–1), задаваемый программой работы прибора ОНК160С, составлял 1 с.
Кроме того, на внешнем ПК по результатам покадровой информации для каждого значения времени tj было рассчитано значение фактического грузового момента MФ как произведения двух параметров, вычисляемых самим прибором по заложенной в него программе: фактической массы поднимаемого груза mГР и вылета стрелы R:
MФ(tj)= mГР(tj)∙R(tj). |
(6.47) |
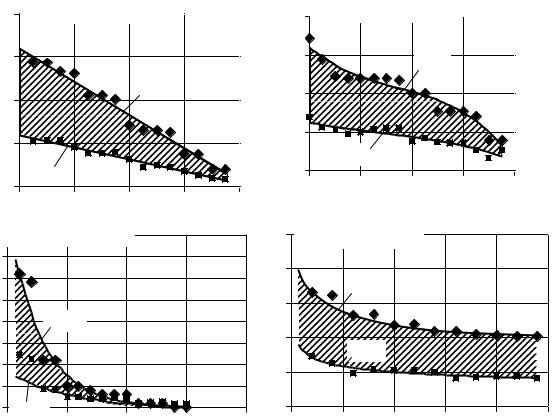
По результатам анализа данных эксперимента были получены регрессионные зависимости максимально и минимально возможных (с учетом диапазона минимально и максимально возможных оборотов коленчатого вала ДВС автокрана в рабочем режиме, nдв) скоростей изменения управляемых координат от фактического значения массы поднимаемого груза mГР и фактического грузового момента MФ. Индекс min соответствует минимальным используемым скоростям в установившемся режиме, индекс max – максимальным. Данные технологические скорости устанавливаются человеком-оператором с учетом предельных ограничений на обороты коленчатого вала ДВС исходя из собственного опыта, интуиции и текущих условий работы. Ограничение максимальных скоростей позволяют избежать аварийных ситуаций, потери устойчивости и значительного раскачивания груза.
Характерная точка подвижного грузового барабана автокрана
Реперная точка в системе координат поворотной колонки
Текущее время процесса 
Рис. 6.14. Определение скорости подъема и опускания груза по результатам цифровой видеосъемки
Скорости подъема и опускания груза (вертикального перемещения груза при помощи грузового каната), которые не измерялись датчиками прибора ОНК-160С, были экспериментально определены по
341
временным интервалам прохождения контрольных точек грузового |
||||||||||||
барабана относительно реперной, т.е. неподвижной, точки. |
|
|||||||||||
0,2 |
v |
, v |
7min |
, рад/с |
|
0,08 |
v8max, v8min, рад/с |
|
|
|
||
|
7max |
|
|
|
|
|
|
|
||||
0,15 |
|
|
|
|
|
0,06 |
|
v8max |
|
|
||
а) |
|
|
|
|
v7max |
б) |
|
|
|
|
|
|
|
|
|
|
0,04 |
|
|
|
|
|
|||
0,1 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
0,05 |
|
|
|
|
|
0,02 |
|
|
|
|
|
|
|
|
|
|
|
|
|
v8min |
|
|
|
|
|
|
|
v7min |
|
|
|
|
0 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
MФ, кН∙м |
|
|||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
400 MФ, кН∙м |
|
|
200 |
400 |
|
800 |
|
||
|
|
200 |
800 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|||||
0,4 v9max, v9min, м/с |
|
0,25 |
v10max, v10min, м/с |
|
|
|
||||||
0,35 |
|
|
|
|
|
0,2 |
|
|
|
|
|
|
0,3 |
|
|
|
|
|
|
v10max |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
0,25 |
|
|
|
|
|
0,15 |
|
|
|
|
|
|
в) 0,2 |
|
v9max |
|
|
г) |
|
|
|
|
|
|
|
0,15 |
|
|
|
|
|
0,1 |
|
v10min |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
0,1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,05 |
|
|
|
|
|
|
|
0,05 |
|
|
|
|
|
|
|
|
|
|
|
|
v9min |
|
|
|
0 |
|
|
|
|
|
|
||
0 |
|
|
mГР×103, кг |
|
|
|
|
mГР×103,кг |
|
|||
|
|
5 |
10 |
20 |
|
5 |
10 |
15 |
25 |
|||
|
|
15 |
|
20 |
||||||||
Рис. 6.15. Графики экспериментальных и регрессионных зависимостей максимальных и минимальных скоростей изменения управляемых координат автокрана: ♦ – экспериментальные максимальные значения, устанавливаемые челове- ком-оператором; ■ – экспериментальные значения при минимальных оборотах ДВС
Обработка и анализ результатов цифровой видеосъемки представлены на рис. 6.14. При этом также определялись минимальная и максимальная скорости при установившемся режиме работы. Для определения значения скорости подъема-опускания груза использовалась следующая зависимость:
v10=(nб∙π∙Dб) / (kп∙ t), |
(6.48) |
где nб – целое число оборотов барабана, зафиксированных при замедленном (в 5 раз) воспроизведении видеозаписи (см. рис. 6.14); Dб – диаметр барабана с учетом уже имеющихся на нем витков каната, Dб=0,37…0,46 м; t –интервал времени, в течение которого барабан повернулся на nб оборотов, с (определяется по таймеру воспроизведе-
342
ния программы KMPlayer); kп – кратность грузового полиспаста исследуемого автокрана, kп=5.
Таблица 6.1. Уравнения регрессии скоростей управляемых координат ГПК
и значения коэффициента детерминации
Обоб- |
Вид регрес- |
|
|
|
|
|
|
|
Интервалы |
Коэф-т |
щен- |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
детер- |
|||
ная |
сионной за- |
|
Уравнение регрессии |
|
уравнений |
|||||
|
|
мина- |
||||||||
ско- |
висимости |
|
|
|
|
|
|
|
регрессии |
|
|
|
|
|
|
|
|
ции R2 |
|||
рость |
|
|
|
|
|
|
|
|
|
|
v7 min |
Линейная |
v7 min=–0,00000007 MФ +0,059 |
|
0 ≤ MФ ≤ |
0,9718 |
|||||
|
≤760 кН∙м |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
v7 max |
Линейная |
v7 max=–0,0000002 MФ +0,16 |
|
0 ≤ MФ ≤ |
0,9627 |
|||||
|
≤760 кН∙м |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
v8 min |
Полиноми- |
v8 min=(–4∙10–20) MФ |
3+(4∙10–14) MФ |
2– |
0 ≤ MФ ≤ |
0,8501 |
||||
альная |
|
(3∙10–08) MФ +0,0248 |
|
≤760 кН∙м |
||||||
v8 max |
Полиноми- |
v8 max=(–2∙10–19) MФ |
3+(2∙10–13) MФ |
2– |
0 ≤ MФ ≤ |
0,9402 |
||||
альная |
|
(1∙10–07) MФ +0,064 |
|
≤760 кН∙м |
||||||
v9 min |
Экспонен- |
v |
|
= |
0,0937e |
-0,1881×mГР |
|
1000≤ mГР≤ |
0,8559 |
|
циальная |
9 min |
|
|
≤15000 кг |
||||||
|
|
|
|
|
|
|
|
|||
v9 max |
Экспонен- |
v |
|
= |
0,4961e |
-0,3639×mГР |
|
1000≤ mГР≤ |
0,9006 |
|
циальная |
9 max |
|
|
≤15000 кг |
||||||
|
|
|
|
|
|
|
|
|||
v10 min |
Степенная |
|
v10 min=0,0826 mГР–0,2186 |
|
1000≤ mГР≤ |
0,8601 |
||||
|
|
|
|
|
|
|
|
|
≤24000 кг |
|
v10 max |
Степенная |
|
v10 max=0,2022 mГР–0,2215 |
|
1000≤ mГР≤ |
0,9566 |
||||
|
|
|
|
|
|
|
|
|
≤24000 кг |
|
Использование видеозаписи вращения барабана для определения скорости движения груза через грузовой понижающий полиспаст позволило повысить точность экспериментальных данных.
В результате обработки и анализа данных, полученных с регистратора параметров прибора ОНК-160С и цифровой видеосъемки грузового барабана, были получены аппроксимационные регрессионные зависимости максимально и минимально возможных скоростей изме-
нения управляемых координат (v7 min, v7 max, v8 min, v8 max, v9 min, v9 max, v10 min, v10 max) от фактического значения массы поднимаемого груза
mГР и фактического грузового момента MФ в виде линейных уравнений, степенных, экспоненциальных зависимостей и полиномов 3-й степени (рис. 6.15, табл. 6.1). Представленные функциональные зависимости отражают границы зоны рациональных технологических скоростей рабочего процесса, которые устанавливает человекоператор.
Проведенные экспериментальные исследования позволили получить численные значения параметров, входящих в математическую
343
модель автокрана, подтвердить адекватность математической модели и составить уравнения регрессии рациональных технологических скоростей изменения управляемых координат от массы груза и грузового момента сил, действующих на автокран.
6.4. Инженерные разработки и рекомендации по заземлению
иповышению устойчивости отдельно стоящего мобильного грузоподъемного крана, а также созданию самоходного двухстрелового крана
ГПК во время работы является объектом повышенной опасности, очень многие внешние факторы влияют на стабильность и безопасность его работы. Необходимым условием во время выполнения работ является обеспечение безопасности.
При работе мобильных ГПК вблизи линий электропередач возникает опасность поражения людей электрическим током [129].
Предлагается использовать в данных условиях временное заземление мобильного ГПК в виде погруженных в грунт электродов, жестко связанных с базовым шасси машины. Это позволит предотвратить несчастные случаи, а также повысит устойчивость машины против опрокидывания. Разработаны два конструктивных исполнения электродов: в виде изогнутых стержней, совмещенных с гидравлическими опорами, и в виде винтов. Рассмотрим их подробнее.
Система заземления и повышения устойчивости мобильного ГПК с гидравлическими опорами
Описание системы. Известны заземляющие устройства в виде различных комбинаций горизонтальных и вертикальных заземлителей, монтируемых в земле на определенной глубине [148]. Однако известные устройства обладают следующими недостатками: для своего размещения они требуют значительных земельных площадей, при их сооружении выполняются большие объемы земляных работ, монтаж производится вручную, большие трудности возникают при их демонтаже. Перечисленные недостатки затрудняют их применение для временного заземления мобильного ГПК.
Из известных технических решений наиболее близким по технической сущности к описываемой в монографии системе является переносное заземляющее устройство [157]. Оно содержит основание, подвижные заземлители, установленные на основании в направляющих, расположенных под углом 45° к поверхности земли и под углом
344