Материал: 2426
Движение штока каждой из опор останавливается независимо от других, до или во время завершения четвертого этапа, при выполнении соответствующего условия:
(l1 опт– l≤ l1 ≤l1 опт+ l); (l2 опт– l≤ l2 ≤l2 опт+ l); |
(6.34) |
(l3 опт– l≤ l3 ≤l3 опт+ l); (l4 опт– l≤ l4 ≤l4 опт+ |
l). |
Четвертый этап завершается по любому из двух условий (6.35)
или (6.36):
(l1 опт– |
l≤ l1 ≤l1 опт+ |
l) (l2 опт– |
l≤ l2 ≤l2 опт+ |
l) |
(6.35) |
(l3 опт– |
l≤ l3 ≤l3 опт+ |
l) (l4 опт– l≤ l4 ≤l4 опт+ |
l). |
|
|
(R1 ≤ |
R) | (R2 ≤ |
R) | (R3 ≤ |
R) | (R4 ≤ R). |
|
(6.36) |
Условие (6.35) означает достижение оптимального положения штоков и вызывает переход к 5-му этапу. Условие (6.36) означает отрыв одной или нескольких опор от грунта и вызывает переход к 6-му этапу.
Пятый этап. Выполняется перераспределение нагрузки между опорами машины с целью повышения равномерности загрузки опор и предотвращения отрыва опор от грунта при проседании последнего. В начале 5-го этапа однократно для данного этапа определяется номер опоры r с минимальным значением силы реакции, определенной по
(6.1)
r= Индекс (min [R1 R2 R3 R4]) при t=0, |
(6.37) |
и начальная длина гидроцилиндра данной опоры lr 5н.
Затем длина опоры lr увеличивается, шток опоры r приводится в положение, при котором значение силы реакции R5min, минимальной
из четырех реакций R1, R2, R3, R4, достигает максимума: |
|
R5min=min [R1 R2 R3 R4]. |
(6.38) |
Введем новую переменную Rmin r – минимальную силу реакции из множества всех реакций опор за исключением опоры r:
Rmin r= min [{R1 R2 R3 R4} \ {Rr}], |
(6.39) |
где \ – знак исключения из множества.
Значение скорости перемещения штока опоры r на пятом этапе будет определяться выражением
330
|
|
|
ìvmin , |
|
если Rr |
< (Rmin _r |
- |
R); |
(R |
+ R); |
|
|||
v |
r |
= |
ï0, |
|
если |
(R |
|
- R)£ R £ |
(6.40) |
|||||
|
|
í |
|
|
|
min _r |
|
|
r |
min _r |
|
|
||
|
|
|
ï- v |
min |
, если R |
> (R |
+ |
R), |
|
|
|
|||
|
|
|
î |
|
r |
|
min _r |
|
|
|
|
|
||
здесь vmin – определенная минимальная скорость движения штока гидроцилиндра, обеспечиваемая гидроприводом машины. Положительным значениям соответствует выдвижение штока.
Требуемое значение длины гидроцилиндра опоры r на 5-м этапе будет определяться выражением
lr=lr 5н+vmin∙t. |
(6.41) |
Пятый этап завершается по любому из двух условий (6.36) или
(6.42):
(Rmin r– R)≤Rr≤(Rmin r+ R). |
(6.42) |
Условие (6.42) означает достижение оптимального соотношения сил реакций опор и вызывает переход к 4-му этапу. Условие (6.36) означает отрыв одной или нескольких опор от грунта и вызывает переход к 6-му этапу.
Внормальных условиях работы после горизонтирования платформы и приведения ее в оптимальное по высоте положение 4-й и 5-й этапы будут постоянно чередоваться между собой.
Шестой этап. Аварийное состояние машины, при котором произошел отрыв одной или нескольких опор от грунта вследствие его проседания. Выключается рабочее оборудование, происходит выдвижение оторванных от грунта опор с максимальной скоростью до достижения их контакта с грунтом.
Вначале этапа однократно определяются начальные значения
сил нормальных реакций на всех опорах машины R1 5н, R2 5н, R3 5н, R4 5н по (6.1) и однократно измеряются длины всех гидравлических опор
l1 5н, l2 5н, l3 5н, l4 5н.
Значения скоростей перемещения каждого штока v1, v2, v3, v4 на шестом этапе будут определяться выражениями:
|
ì(R |
|
-R )×k |
|
при R |
£ DR; |
ì(R |
|
-R )×k |
при R |
£ DR; |
|
|||||||||
v1 |
ï |
min_1 |
|
1 |
|
|
|
1_5н |
|
v2 |
ï |
min_2 |
2 |
|
|
|
2_5н |
|
(6.43) |
||
=í |
|
при R |
|
> DR; |
|
=í |
|
при R |
|
> DR; |
|
||||||||||
|
ï0 |
|
|
|
|
ï0 |
|
|
|
||||||||||||
|
î |
|
|
|
1_5н |
|
|
|
|
|
î |
|
|
2_5н |
|
|
|
|
|
||
|
ì(R |
|
|
-R )×k |
при R |
|
£ DR; |
|
|
ì(R |
|
- R )×k при R |
£ DR; |
||||||||
v |
ï |
min_3 |
|
3 |
|
|
3_5н |
|
v |
= |
ï min _4 |
|
4 |
|
|
4_5н |
|
||||
=í |
|
при R |
|
|
> DR; |
|
|
í |
при R |
|
> DR. |
|
|
||||||||
3 |
ï0 |
|
|
|
|
|
4 |
|
ï0 |
|
|
|
|||||||||
|
î |
|
|
|
3_5н |
|
|
|
|
|
|
î |
|
|
4_5н |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
331 |
|
|
|
|
|
|
|
|
|
|
Требуемые значения длин гидравлических опор будут определяться выражениями:
|
|
l1=l1 5н+ v1∙t; |
l2=l2 5н+ v2∙t; |
l3=l3 5н+ v3∙t; |
|
l4=l4 5н+ v4∙t, |
(6.44) |
||||||||||
где t – время, отсчитываемое с начала этапа. |
|
|
|
|
|
||||||||||||
|
|
|
|
|
Пуск |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2-й этап |
|
|
|
Задание постоянных параметров: a, |
|
|
|
|
|
Время t=0 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
b, ld, |
l0, lmax, G0, Sп, Sш, Rmin 1, Rmin 2, |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
t= t+ dt |
|
|
|
|||||||
|
|
Rmin 3, Rmin 4, vс, vmin, tпред, dt |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
Измерение текущих |
|
|
||||||||||
|
|
|
|
|
|
|
|
1-й этап |
|
|
|
|
|
||||
|
|
|
|
|
Время t=0 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
значений первичных измеряемых |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
параметров: pп1, pш1, pп2, pш2, pп3, |
||||||
|
|
|
|
|
t= t+ dt |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
pш3, pп4, pш4 |
|
|
|||||
|
|
|
|
Измерение текущих |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
значений первичных измеряемых |
|
|
|
|
|||||||||||
|
|
|
|
Определение текущих значений сил |
|
||||||||||||
|
|
параметров: pп1, pш1, pп2, pш2, pп3, |
|
|
нормальных реакций R1, R2, R3, R4 на |
|
|||||||||||
|
|
pш3, pп4, pш4 |
|
|
|
|
|
|
|
опорах по (6.1) |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Определение текущих значений сил |
|
|
Определение требуемых значений длин |
|
|||||||||||
|
|
нормальных реакций R1, R2, R3, R4 на |
|
|
|
||||||||||||
|
|
|
|
гидроцилиндров l1, l2, l3, l4 по (6.16) |
|
||||||||||||
|
|
|
|
опорах по (6.1) |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Определение требуемых значений ско- |
|
|
|
Вывод требуемых |
|
|
|||||||||
|
|
ростей перемещения штоков гидроци- |
|
|
|
|
|
||||||||||
|
|
|
|
значений длин гидроцилиндров l1, |
|||||||||||||
|
|
линдров v1, v2, v3, v4 по (6.13) |
|
|
|||||||||||||
|
|
|
|
l2, l3, l4 для исполнительных ме- |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ханизмов |
|
|
|
|
|
Определение требуемых значений длин |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
гидроцилиндров l1, l2, l3, l4 по (6.14) |
|
|
Нет |
|
|
|
Да |
||||||||
|
|
|
|
Вывод требуемых |
|
|
|
Выполнение |
|||||||||
|
|
|
|
|
|
|
|
|
условия (6.17) |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
значений длин гидроцилиндров |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
l1, l2, l3, l4 для исполнительных |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
механизмов |
|
|
|
|
Измерение текущих |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
Нет |
Выполнение |
Да |
|
|
значений длин гидроцилиндров |
||||||||||
|
|
|
|
|
|
l1 2, l2 2, l3 2, l4 2 |
|
|
|||||||||
|
|
|
|
условия (6.15) |
|
|
|
|
|
1 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Измерение текущих значений длин гидроцилиндров
l1 1, l2 1, l3 1, l4 1
1
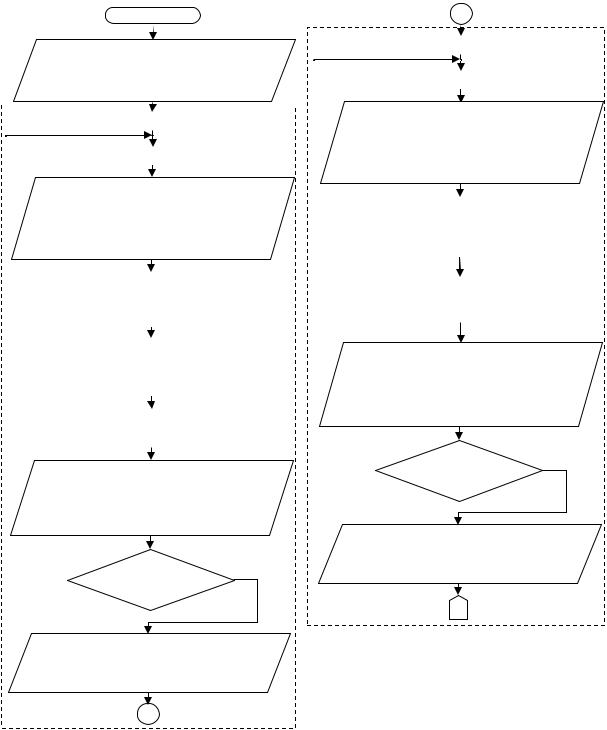
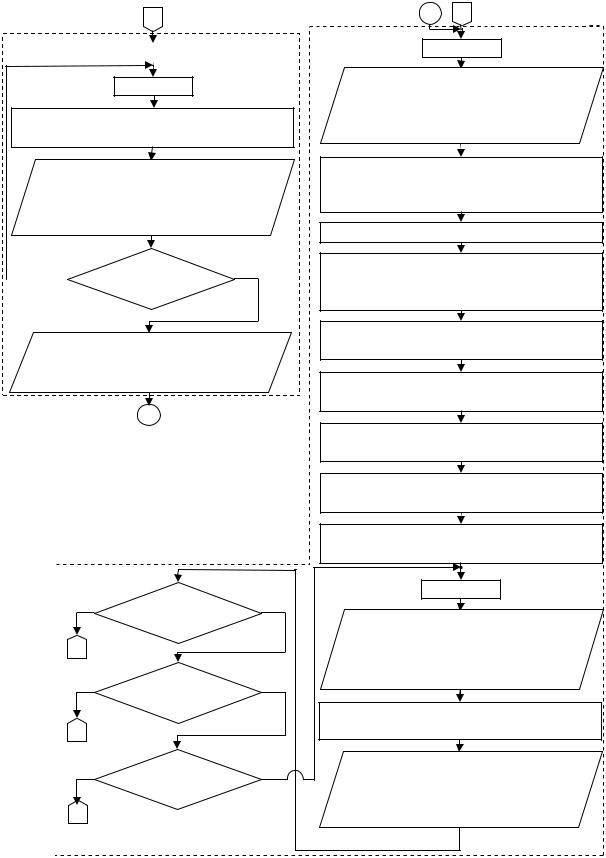
Рис. 6.9. Блок-схема алгоритма работы устройства управления положением платформы (начало)
332
|
3 |
|
|
|
|
|
|
|
|
|
|
3 |
4 |
|
6-й этап |
|||
|
|
|
|
|
5-й этап |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Время t=0 |
|
|
|
|
|
|
|
|
Время t=0 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Измерение текущих |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
Измерение текущих |
|||||||||||
значений первичных измеряемых |
|
|
|
|
|
|
||||||||||||
|
|
|
|
значений первичных измеряемых |
||||||||||||||
параметров: pп1, pш1, pп2, |
pш2, pп3, |
|
|
|
|
|||||||||||||
|
|
|
|
параметров: pп1, pш1, pп2, |
pш2, pп3, |
|||||||||||||
pш3, pп4, pш4 |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
pш3, pп4, pш4, l1 5н, l2 5н, l3 5н, l4 5н |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Определение текущих значений сил |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
нормальных реакций R1, R2, R3, R4 на |
|
|
|
|
Определение начальных значений сил |
|||||||||||||
|
опорах по (6.1) |
|
|
|
|
|
|
|
нормальных реакций R1 5н, R2 5н, R3 5н, |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
R4 5н на опорах по (6.1) |
|||||
Определение номера опоры r с мини- |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
мальным значением реакции по (6.37) |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
t= t+ dt |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Измерение текущих |
|||||
|
|
t= t+ dt |
|
|
|
|
|
|
|
|
|
|
||||||
|
Измерение текущих |
|
|
|
|
значений первичных измеряемых |
||||||||||||
|
|
|
|
|
параметров: pп1, pш1, pп2, |
pш2, pп3, |
||||||||||||
значений первичных измеряемых |
|
|
|
|
||||||||||||||
|
|
|
|
pш3, pп4, pш4 |
|
|
|
|
||||||||||
параметров: pп1, pш1, pп2, pш2, pп3, |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
pш3, pп4, pш4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
Определение текущих значений сил |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
нормальных реакций R1, R2, R3, R4 на |
|||||||
Определение текущих значений сил |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
опорах по (6.1) |
|
|||||||||||
нормальных реакций R1, R2, R3, R4 на |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
опорах по (6.1) |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
Определение требуемых скоростей дви- |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
жения штоков v1, v2, v3, v4 по (6.43) |
|||||||
Определение минимальной силы реакции |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Rmin r из множества всех реакций опор за |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
Определение требуемых значений длин |
||||||||||||||
исключением опоры r по (6.39) |
|
|
|
|
гидроцилиндров l1, l2, l3, l4 по (6.44) |
|||||||||||||
|
|
|
|
|
|
|
|
|
Вывод требуемых |
|
||||||||
Определение требуемой скорости движе- |
|
|
|
|
|
|
|
|||||||||||
ния штока опоры r по (6.40) |
|
|
|
|
значений длин гидроцилиндров l1, |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
l2, l3, l4 для исполнительных ме- |
|||||||
Определение требуемого значения дли- |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
ханизмов |
|
||||||||||
ны гидроцилиндра lr по (6.41) |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
Вывод требуемого |
|
|
|
|
|
|
|
Нет |
|
Выполнение |
Да |
||||||
значения длины гидроцилиндра |
|
|
|
|
|
|
условия (6.45) |
|
||||||||||
|
|
|
|
|
|
|
||||||||||||
опоры r для исполнительных ме- |
|
|
|
|
|
|
|
|
|
|
|
6 |
||||||
|
|
ханизмов |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Да |
Выполнение |
Нет |
|
|
|
|
|
Нет |
|
Завершение |
Да |
|||||||
|
|
|
|
|
|
|||||||||||||
|
условия (6.36) |
|
|
|
|
|
|
|
|
|
|
|
работы |
|
||||
3 |
|
|
|
5 |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Да |
Выполнение |
Нет |
|
|
|
|
|
Втягивание штоков всех опор с макси- |
||||||||||
|
|
|
|
|
|
|
мальной скоростью |
|||||||||||
6 |
условия (6.42) |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
Останов |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
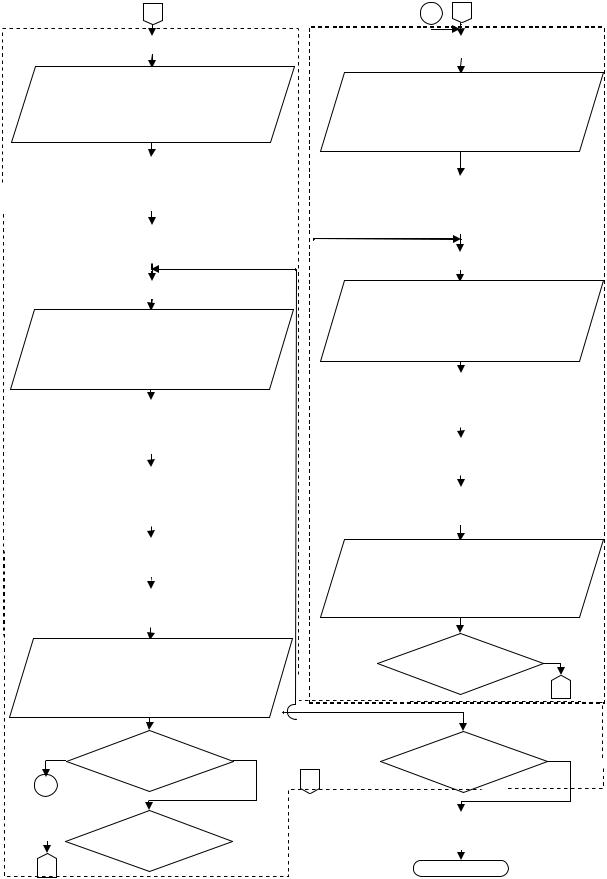
Рис. 6.9. Блок-схема алгоритма работы устройства управления положением платформы (окончание)
334