Материал: 2426
Шестой этап заканчивается, когда силы реакций на всех опорах |
||||||||||
превысят значения, близкие к Rmin: |
|
|
|
|
|
|
||||
(R1≥Rmin 1– R) (R2≥Rmin 2– |
R) (R3≥Rmin 3– |
R) (R4≥Rmin 4– |
R), (6.45) |
|||||||
где R – допустимая погрешность силы реакции. |
|
|
|
|
||||||
После завершения 6-го этапа выполняется 4-й этап. Общая блок- |
||||||||||
схема алгоритма автоматического подъема и выравнивания опорной |
||||||||||
платформы ГПК в горизонтальной плоскости приведена на рис. 6.9. |
||||||||||
0 |
y4, м |
|
|
|
|
|
|
|
|
|
-0.01 |
|
|
|
|
|
|
|
|
|
|
-0.02 |
|
|
|
|
|
|
|
|
|
|
-0.03 |
|
|
|
|
|
|
|
|
|
|
-0.04 |
|
|
|
|
|
|
|
|
|
|
-0.050 |
10 |
20 |
30 |
40 |
50 |
60 |
70 |
80 |
t, c |
100 |
1.25 l1,l2,l3,l4, м |
|
|
|
|
|
|
|
|
|
|
1.2 |
|
|
|
|
|
|
|
|
|
|
1.15 |
|
|
|
|
|
|
|
|
|
|
1.1 |
|
|
|
|
1.21 |
|
l3 |
l2 |
|
|
|
|
|
|
1.2 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
||
1.05 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.19 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l4 |
|
|
1.0 |
l1, l2 |
|
|
|
1.18 |
|
|
l1 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|||
0.95 |
|
|
|
|
1.17 |
55 |
60 t, c |
65 |
|
|
l3, l4 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
0.9 0 |
10 |
20 |
30 |
40 |
50 |
60 |
70 |
80 |
t, c |
100 |
0.003 αx, αy, рад |
|
|
|
|
|
|
|
|
|
|
0.002 |
|
|
|
|
αy |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.001 |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
-0.001 |
|
|
|
αx |
|
|
|
|
|
|
-0.002 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-0.0030 |
10 |
20 |
30 |
40 |
50 |
60 |
70 |
80 |
t, c |
100 |
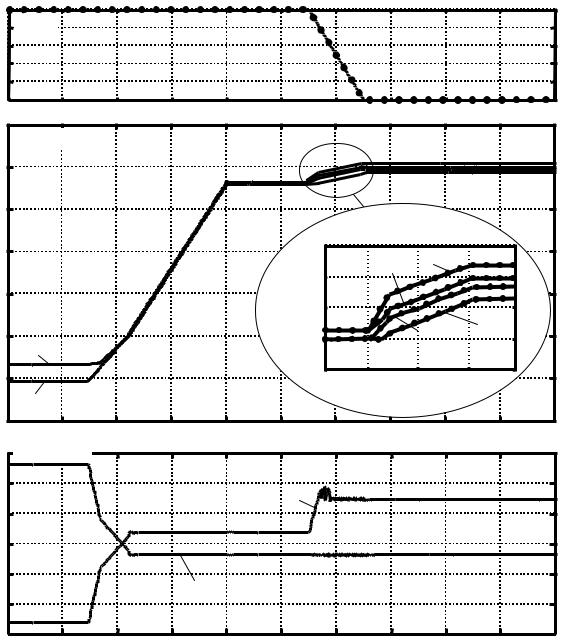
Рис. 6.10. Временные зависимости вертикальной координаты грунта y4 под опо- |
||||||||||
рой № 4, длин четырех опор l1, l2, l3, l4 и углов наклона диагоналей платформы |
||||||||||
|
|
|
αx, αy (пример моделирования) |
|
|
|
|
|||
335
Для подтверждения адекватности предложенного алгоритма были осуществлены его программная и модельная реализации в системе MATLAB. В качестве примера, подтверждающего работоспособность синтезированного алгоритма, на рис. 6.10 приведены временные зависимости вертикальной координаты грунта y4 под опорой № 4, длин четырех опор l1, l2, l3, l4 и углов наклона диагоналей платформы αx, αy. Моделировалась ситуация вывешивания платформы на опорах и последующего проседания грунта под одной из опор (№ 4) на 0,05 м в течение 10 с (с 55 до 65 с времени моделирования). Допустимая угловая погрешность для углов наклона платформы α в данном примере принималась равной 0,00174532 рад (0,1°). Из зависимостей на рис. 6.10 видно, что после вывешивания платформы (t≈20 c) абсолютные значения углов наклона диагоналей платформы αx, αy все время находятся в пределах, не превышающих α.
Главным отличительным признаком алгоритма является использование углов наклона диагоналей платформы. Этим обеспечивается независимое одновременное горизонтирование платформы в двух ее диагональных плоскостях, причем возможно горизонтирование одновременным выдвижением одной диагональной опоры и втягиванием другой, что ускоряет процесс. Контроль длин опор обеспечивает возможность поддержания опорной платформы на заданной высоте и повышает запас управляемости углами наклона платформы. Вычисление усилий на опорах по давлениям гидрожидкости позволяет предотвратить внештатные ситуации отрыва опор от грунта и потери устойчивости при проседании грунта под какой-либо из опор.
6.3. Экспериментальные исследования рабочего процесса стрелового гидравлического автокрана
С целью подтверждения адекватности имитационной математической модели ГПК, определения численных значений параметров, входящих в математическую модель [203], и рациональных значений технологических скоростей изменения управляемых координат были проведены экспериментальные исследования автокрана «Ивановец КС-45717К-2» грузоподъемностью 25 т на базе КамАЗ-65115 в ООО
«Кох-Сибнефтехиммонтаж» (г. Омск, 2011 г.). Исследования автокрана были проведены в реальных производственных условиях при перемещении грузов (рис. 6.11).
336

|
|
Рассматривались процессы |
поворота |
|
|
поворотной платформы, подъема и опус- |
|||
|
кания стрелы, изменения длины телеско- |
|||
|
пической стрелы, а также подъема и опус- |
|||
|
кания крюковой обоймы. Выполнение |
|||
|
всех |
перечисленных рабочих |
операций |
|
|
проводилось с грузами различной массы |
|||
|
(от 100 кг до максимальной грузоподъем- |
|||
|
ности 25000 кг), а также без груза. |
|||
|
|
Положение и |
ориентация |
базового |
|
шасси автокрана в трехмерном простран- |
|||
|
стве |
задаются |
шестью |
условно- |
|
постоянными обобщенными координата- |
|||
|
ми. Кроме того, присутствуют четыре |
|||
|
управляемые координаты рабочего обору- |
|||
|
дования, меняющие свои значения: угол |
|||
|
поворота платформы, угол подъема стре- |
|||
|
лы, длина телескопической стрелы и дли- |
|||
|
на грузового каната. |
|
||
|
|
В ходе исследований измерялись ми- |
||
|
нимально и максимально возможные (с |
|||
Рис. 6.11. Исследуемый |
учетом диапазона |
минимально |
и макси- |
|
автокран КС-45717К-2 |
мально возможных оборотов коленчатого |
|||
|
вала |
двигателя |
внутреннего |
сгорания |
(ДВС) автокрана в рабочем режиме, nдв) скорости изменения управляемых координат крана: поворота поворотной платформы вокруг вертикальной оси, поворота стрелы при подъеме и опускании, выдвижения и втягивания стрелы, крюковой обоймы при подъеме и опускании груза.
Оснащение стреловых ГПК системами безопасности типов ОНК-140, ОНК-160 и ОГМ240 согласно Правилам ПБ 10-382-00 [129, 170, 176, 177] позволило использовать при экспериментальных исследованиях прибор безопасности ОНК-160С, оснащенный регистратором параметров, в совокупности с установленными на кране датчика-
ми (рис. 6.12).
Встроенный в ОНК-160С регистратор параметров работы крана содержит энергонезависимые часы реального времени, объем его памяти позволяет фиксировать всю оперативную информацию в течение 75 ч непрерывной работы. В комплект поставки прибора ОНК160С гидравлических кранов, выполняющего функции обеспечения
337

безопасности, входят: блок отображения информации со встроенным регистратором параметров (рис. 6.12, г); датчик азимута (датчик угла поворота платформы крана, рис. 6.12, а); маятниковый датчик угла наклона стрелы; датчик длины стрелы (рис. 6.12, б); два датчика для измерения давления в поршневой и штоковой полостях гидроцилиндра подъема стрелы (рис. 6.12, в); контроллер оголовка стрелы со встроенным модулем защиты от опасного напряжения; контроллер поворотной части со встроенным датчиком крена [49, 50, 150, 176, 177].
а) |
б) |
в) |
г) |
Рис. 6.12. Места установки датчиков (а, б, в) и блока отображения индикации (г) ОНК-160С
Непосредственно измерялись датчиками и вычислялись системой ОНК-160С следующие параметры: угол поворота платформы, угол наклона стрелы, длина стрелы, фактическая масса груза и вылет стрелы. Первые три параметра непосредственно измерялись датчиками поворота, наклона и длины соответственно. Последние два параметра рассчитывались. Работа ограничителя грузоподъемности осуществля-
338
ется с помощью программы, заложенной в память микроконтроллера блока отображения информации. Измеряемые при помощи датчиков величины давлений в полостях гидроцилиндра подъема стрелы зависят от фактической массы груза на крюке крана, угла наклона стрелы и ее длины. Вылет стрелы также зависит от угла наклона и длины стрелы. Таким образом, использовались показания датчиков: угла поворота платформы, угла наклона стрелы, длины стрелы и давлений в полостях гидроцилиндра подъема стрелы.
Основным элементом датчика угла поворота платформы является сдвоенный проволочный переменный резистор с большой износоустойчивостью, вал которого жестко связан с соответствующими механизмами крана. Датчик длины стрелы (также проволочный переменный резистор с большой износоустойчивостью, вал которого через редуктор связан с пружинным барабаном) совместно с маятниковым датчиком наклона стрелы располагаются на коренной секции стрелы на расстоянии 1–2 м от кабины крановщика (см. рис. 6.12, б). Цифровые датчики давления врезаны в гидравлическую схему крановой установки (поршневой – в поршневую магистраль, штоковый – в штоковую, см. рис. 6.12, в).
Все датчики, работающие с прибором безопасности ОНК-160С, установлены на кране стационарно.
Диапазон измерения угла поворота платформы крана составляет от 0 до 360°. Диапазон измерения угла наклона стрелы относительно горизонта: от –10 до +85° [150].
Погрешности измерения и вычисления параметров в статическом режиме составляют не более: длины стрелы ±0,05 м; угла наклона стрелы ±0,2°; угла поворота платформы ±0,8°; фактической массы поднимаемого груза ±3%; вылета стрелы ±1,5% [150].
Для считывания информации, записанной в блок телеметрической памяти ограничителя ОНК-160С в процессе его работы, для дальнейшей обработки на ПК использовался считыватель телеметрической информации СТИ-3.
Специальные программы считывания и анализа информации РП ОНК-160С (рис. 6.13) позволили осуществить перенос информации из СТИ-3 в ПК и последующий анализ временных зависимостей измеряемых и вычисляемых параметров средствами MS Excel (рис. 6.13, г).
Изменения управляемых обобщенных координат, измеряемые непосредственно при помощи датчиков, значения которых зафиксированы в таблице покадровой оперативной информации, использовались для вычисления соответствующих скоростей изменения обоб-
339