Материал: 2426
|
|
|
|
a |
|
|
|
|
|
|
|
|
Xd |
|
|
l2 2 |
|
|
|
αx |
|
|
|
|
|
3 l3 |
|
|
|
|
|
|
|
|
|
b |
R2 |
О |
ld |
|
R3 |
|
|
|
||||
|
|
Y1 |
|
|
|
Горизонтали |
|
|
X1 |
|
αy |
|
|
|
|
|
|
|
||
|
|
l1 |
|
4 |
Yd |
l4 |
R1 |
|
|
|
|||
|
1 |
|
R4 |
|
||
|
|
|
Отрыв |
|
|
|
|
|
|
|
|
|
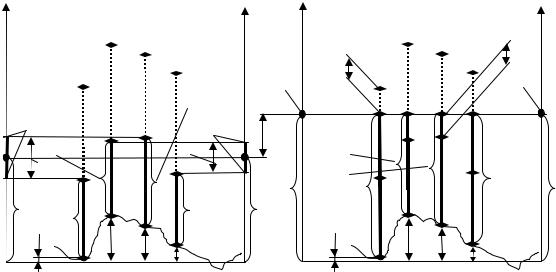
Рис. 6.6. Опорная платформа ГПК с информационными параметрами
Схема реализующего методику устройства с логическими элементами (рис. 6.5) имеет в качестве входов следующие первичные информационные параметры (измеряются с помощью датчиков, рис. 6.6): l1, l2, l3, l4 – длины гидравлических опор (гидроцилиндров) от нижней поверхности подпятника гидроцилиндра до плоскости опорной платформы ГПК; αx, αy – углы наклона опорной платформы относительно горизонтальной плоскости, измеренные в двух диагональных вертикальных плоскостях платформы; pп1, pш1, pп2, pш2, pп3, pш3, pп4, pш4 – давления в поршневой и штоковой полостях гидроцилиндров опор 1–4 соответственно (см. рис. 6.4).
Выходные булевы переменные функциональной схемы с логическими элементами x1, x3, x5, x7 принимают значения: 1, что соответствует выдвижению штоков гидроцилиндров опор 1, 2, 3, 4 соответственно; 0, что соответствует отсутствию выдвижения; x2, x4, x6, x8 принимают значение 1, что соответствует втягиванию штока гидроцилиндра опоры 1, 2, 3, 4 соответственно, значение 0 соответствует отсутствию втягивания; переменная x9 принимает значение 1, что соответствует сигналу аварийной остановки и значение 0, соответствующее штатной работе системы.
Методика однотактная. Отсутствует необходимость хранения данных предыдущих тактов в памяти.
На основании текущих значений первичных информационных параметров рассчитываются силы нормальной реакции на опорах R1,
320
x2=(a3˅(a14˄¬a5))˄(¬((a3˅(a14˄¬a5))˄(a13˅a5˅a4))); |
(6.5) |
x3=(a15˅a7˅a4)˄(¬((a3˅(¬a7˄a16))˄(a15˅a7˅a4))); |
(6.6) |
x4=(a3˅(a16˄¬a7))˄(¬((a3˅(a16˄¬a7))˄(a15˅a7˅a4))); |
(6.7) |
x5=(a14˅a9˅a4)˄(¬((a3˅(¬a9˄a13))˄(a14˅a9˅a4))); |
(6.8) |
x6=(a3˅(a13˄¬a9))˄(¬((a3˅(a13˄¬a9))˄(a14˅a9˅a4))); |
(6.9) |
x7=(a16˅a11˅a4)˄(¬((a3˅(¬a11˄a15))˄(a16˅a11˅a4))); |
(6.10) |
x8=(a3˅(a15˄¬a11))˄(¬((a3˅(a15˄¬a11))˄(a16˅a11˅a4))); |
(6.11) |
x9=a1˅a2˅a6˅a8˅a10˅a12, |
(6.12) |
где ¬ – аналог логического отрицания (инверсии); ˄ – аналог логического умножения (конъюнкции); ˅ – аналог логического сложения (дизъюнкции). Операции перечислены в порядке убывания приоритета.
Y |
lmax |
|
|
|
|
Y |
lmax |
|
|
|
|
lmax |
|
|
|
lmax |
sd |
|
|||
lmax |
|
|
lmax |
|
|
su |
lmax |
|
lmax |
|
|
|
l3 min |
αx=0 |
|
|
αy=0 |
|
|||
|
|
|
|
|
|
|
|
|
||
αx отр |
|
|
|
αy отр |
YО |
|
|
|
|
|
l2 min |
|
|
|
y2 4 |
l2 опт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
y1 3 |
|
|
|
|
y1 3 |
l3 опт |
|
|
l4 опт |
|
y1 3 |
|
|
|
l4 min |
l1 опт |
|
|
y2 4 |
||
|
|
|
|
|
|
|
|
|
||
l1 min |
|
|
|
y2 4 |
|
|
|
|
|
|
|
|
|
|
y1 |
|
|
|
|
||
y1 |
y2 |
y3 |
y4 |
|
|
y2 |
y3 |
y4 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
а) |
|
|
|
|
|
б) |
|
|
Рис. 6.7. Последовательные состояния платформы ГПК (пример): а – при отрыве пневматических колес от грунта; б – оптимальное по запасам ходов s положение
(su≈sd)
Для подтверждения работоспособности и адекватности предложенной методики была осуществлена ее программная и модельная реализация в системе математических расчетов MATLAB при помощи логических блоков MATLAB – Simulink, а также получены таблицы истинности, задающие булевы логические функции (6.4)–(6.12) в значениях «истина» либо «ложь» (1 либо 0).
Для описания алгоритма приняты следующие условные обозначения (рис. 6.7): l1, l2, l3, l4 – длины гидравлических опор (гидроцилиндров) от нижней поверхности подпятника гидроцилиндра до плоскости опорной платформы; a, b – размеры опорного контура ма-
322
шины; ld – расстояние между осями двух гидроцилиндров, расположенных на одной диагонали платформы; αx, αy – углы наклона опорной платформы относительно горизонтальной плоскости, измеренные в двух диагональных вертикальных плоскостях платформы; y1, y2, y3, y4 – вертикальные координаты грунта под четырьмя выносными опорами соответственно; l0 – минимальное значение длины каждой из гидравлических опор при полностью втянутом штоке; l1 min, l2 min, l3 min, l4 min – минимальные предельные значения длин гидравлических опор, соответствующие отрыву пневмоколес от грунта для текущих значений вертикальных координат микрорельефа грунта под выносными опорами и под пневмоколесами; lmax – максимальное предельное значение длины каждой из гидравлических опор, соответствующее выдвижению штока гидроцилиндра на максимальную длину; l1 опт, l2 опт, l3 опт, l4 опт – оптимальные значения длин гидравлических опор, соответствующие оптимальному сочетанию значений запасов ходов штоков гидроцилиндров и горизонтированию платформы для текущих условий; αx отр, αy отр – значения углов наклона диагоналей опорной платформы, соответствующих отрыву пневмоколес от грунта для текущих значений вертикальных координат микрорельефа грунта под выносными опорами и под пневмоколесами, измеренных в вертикальных диагональных плоскостях платформы; YО, y1 3, y2 4 – высота точки пересечения диагоналей платформы О над нулевой линией грунта; su, sd – запасы ходов штоков совокупности гидроцилиндров опор на подъем и на опускание платформы соответственно для текущего оптимального горизонтального положения платформы и для текущих значений вертикальных координат микрорельефа грунта под выносными опорами и под пневмоколесами; YО – величина подъема точки О платформы от положения отрыва пневмоколес до оптимального для текущих условий положения; R1, R2, R3, R4 – силы нормальных реакций со стороны грунта на штоке гидроцилиндров опор; G0 – вес машины (опорной платформы с установленным на ней оборудо-
ванием без груза); pп1, pш1, pп2, pш2, pп3, pш3, pп4, pш4 – давления в поршневой и штоковой полостях гидроцилиндров опор 1-4 соответственно;
Sп, Sш – площади поршневой и штоковой полостей гидроцилиндра каждой опоры соответственно; t – текущее время, отсчитываемое с начала этапа алгоритма; dt – шаг дискретности времени.
Первичными измеряемыми параметрами являются: l1, l2, l3, l4, αx,
αy, pп1, pш1, pп2, pш2, pп3, pш3, pп4, pш4. Силы R1, R2, R3, R4 косвенно рассчитываются по (6.1).
323
Пуск
|
|
|
|
1-й этап |
|
|
|
|
|
5-й этап |
|
|
||||
|
Штоки |
гидроцилиндров |
четырех |
|
|
|
|
|
|
|
|
|
||||
|
опор одновременно выдвигаются с |
|
|
|
|
Перераспределение нагрузки между |
|
|
||||||||
|
контролем силы на каждом |
|
|
|
|
|
|
опорами машины |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
На каж- |
|
|
|
|
Да |
Достижение |
|
|
|
|
|||
Нет |
|
дом из штоков сила |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
оптимального соотношения сил |
|
|
|
||||||||
|
|
достигла определенного мини- |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
реакций опор |
|
|
|
|
|||
|
|
|
мального значения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Да |
2-й этап |
|
|
|
|
Нет |
|
|
|
|
|||
|
|
|
|
|
|
|
Отрыв |
|
|
|
|
|||||
|
Выдвижение штоков всех |
опор |
с |
|
|
|
Да |
|
|
|
|
|||||
|
|
|
|
одной или нескольких опор |
|
|
|
|||||||||
|
одинаковой скоростью |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
от грунта |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Сумма |
|
|
|
|
|
|
|
|
Нет |
|
|
|
|
Нет |
сил на опорах достигла |
|
|
|
|
|
|
|
Завершение |
Нет |
|
|
|
|||
|
|
определенной доли от веса |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
работы |
|
|
|
|
|||
|
|
|
платформы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Да |
|
|
|
|
|
|
|
|
Да |
3-й этап |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Дополнительное выдвижении што- |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
ков всех опор на одинаковую ма- |
|
|
|
|
|
|
|
|
|
|
|
||||
|
лую величину |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
4-й этап |
|
|
|
|
|
6-й этап |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Коррекция диагональных углов на- |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
Выдвижение оторванных от грунта |
|
|||||||||
|
клона платформы с одновременным |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
опор с максимальной скоростью |
|
|
|
|||||||
|
смещением штоков всех опор в сре- |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
динное по запасам ходов положение |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
На каж- |
|
|
|
|
|
|
|
Дости- |
|
|
|
|
|
|
Да |
|
|
|
|
||
|
|
жение расчетного оптималь- |
Да |
|
|
дом из штоков сила |
Нет |
|||||||||
|
|
ного положения штоков |
|
|
|
|
|
|
|
достигла определенного мини- |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
мального значения |
|
|
|
||||
|
|
|
всех опор |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Нет |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Отрыв |
|
|
Да |
|
|
|
|
|
|
|
|
|
|
|
|
одной или нескольких опор |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
от грунта |
|
|
|
|
1 |
|
|
|
|
|
|||
|
|
|
Нет |
|
|
|
|
|
|
|
|
|
||||
|
|
Нет |
Завершение |
Да |
|
|
|
|
|
|
|
Останов |
|
|
|
|
|
|
|
работы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
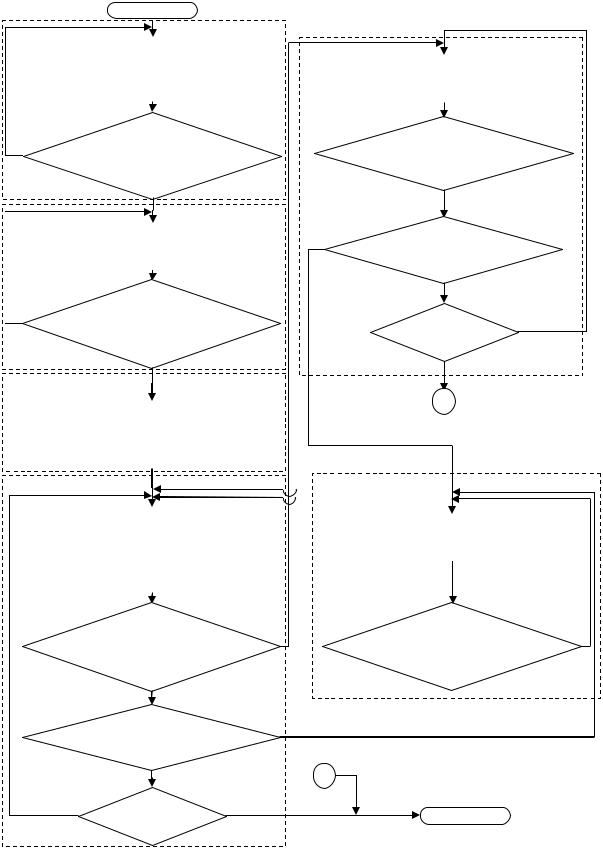
Рис. 6.8. Упрощенная блок-схема алгоритма автоматического горизонтирования опорной платформы ГПК
324