Материал: 2426
X0, УЛЕ |
|
|
|
1,0 |
χmax |
|
|
|
|
|
15 |
|
|
|
|
|
|
|
|
|
|
10 |
|
|
|
|
0,8 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
6,7,8,9 |
|
0,6 |
|
|
6,7,8,9 |
|
5 |
||
5 |
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
0,4 |
|
|
3 |
4 |
|
|
|
|
|
|
|
|
|
||||
0 |
|
2 |
|
|
0,2 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
||
|
|
|
|
|
|
|
|
|||
|
|
3,4 |
|
Z0, УЛЕ X0, УЛЕ |
|
|
|
|||
|
|
|
|
|
|
|
||||
–5 |
0 |
5 |
10 |
15 |
|
15 |
10 |
5 |
0 |
–5 |
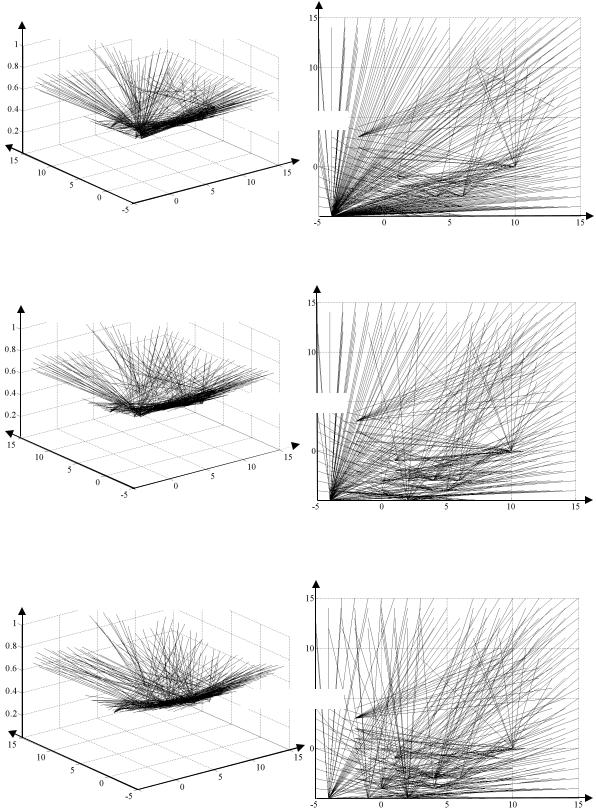
Рис. 5.14. Подмножество неулучшаемых решений задачи при использовании |
||||||||||
|
|
комплексного критерия эффективности χmax (пример) |
|
|
||||||
1,6 |
q7,1, q7,2, q8,1, q8,2, рад |
|
|
|
|
|
|
|
|
|
1,4 |
|
|
|
|
|
|
|
|
|
|
1,2 |
|
q7,1 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,8 |
q8,2 |
|
|
|
|
|
|
|
|
|
0,6 |
q7,2 |
|
|
|
|
|
|
|
|
|
0,4 |
|
|
|
|
|
|
|
|
|
|
q8,1 |
|
|
|
|
|
|
|
|
|
|
0,2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
q9,1, q9,2, q10,1, q10,2, УЛЕ |
|
|
|
|
|
10 |
q10,2 |
|
|
|
|
|
|
|
|
|
|
|
|
8 |
q9,2 |
|
|
|
|
|
6 |
|
|
|
|
|
|
4 |
q9,1 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
q10,1 |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
5∙Δt |
10∙Δt |
15∙Δt |
20∙Δt |
t, с |
25∙Δt |
|
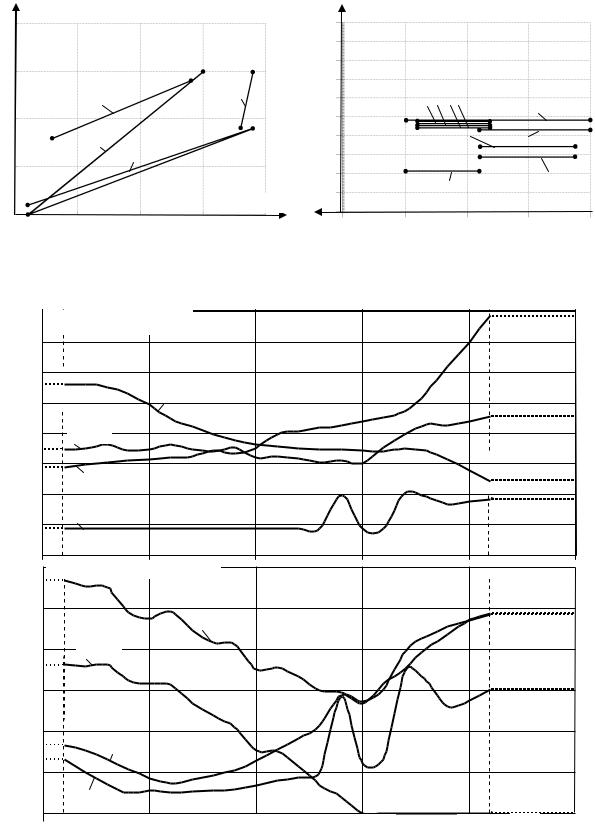
Рис. 5.15. Синхронизированные временные зависимости обобщенных управляемых координат двух кранов для сочетания значений весовых коэффициентов
[λ1=0,5; λ2=0,5] (пример)
312

Приводятся требуемые для обеспечения минимизации комплексного критерия эффективности χmax временные зависимости. t обозначен заданный шаг времени, который может изменяться в широких пределах. Исследования на динамических имитационных моделях показали, что минимальное значение t в случае перемещения двумя стреловыми кранами общего груза должно составлять свыше 10 с, чтобы обеспечить безопасную работу и отсутствие раскачивания груза под действием сил инерции.
Анализ результатов 1-й и 2-й серий экспериментов позволил сделать вывод о работоспособности комплекса методик оптимизации параметров совмещенного рабочего процесса двух ГПК, перемещающих общий груз, а также следующие частные выводы: оптимальные положения базовых шасси двух кранов при использовании критериев эффективности χ и χmax не совпадают; наличие препятствий в рассматриваемой области обуславливает скачкообразный характер изменения оптимальных положений базовых шасси двух кранов при незначительном изменении весовых коэффициентов λ1 и λ2.
Разработанный комплекс методик позволяет оптимизировать в заданных пределах с учетом возможных ограничений технологические параметры совмещенного рабочего процесса двух ГПК, перемещающих общий груз, в частности положения двух базовых шасси в пространстве, при любой форме препятствий в рабочей области.
При этом решаются задача синтеза оптимальных значений неуправляемых во время перемещения груза технологических парамет-
ров (q1,1*; q3,1*; q1,2*; q3,2*; q6,1*; q6,2*), а также задача синтеза оптимальной по заданному критерию эффективности траектории перемещения
груза в пространстве препятствий и соответствующих ей управляе-
мых технологических параметров (q7,1=f(t); q8,1=f(t); q9,1=f(t); q10,1=f(t); q7,2=f(t); q8,2=f(t); q9,2=f(t); q10,2=f(t)).
6. ИНЖЕНЕРНЫЕ РАЗРАБОТКИ. РЕЗУЛЬТАТЫ ЭКСПЕРИМЕНТАЛЬНЫХ ИССЛЕДОВАНИЙ ГРУЗОПОДЪЕМНОГО КРАНА
6.1. Обоснование информационных параметров процесса управления положением платформы грузоподъемного крана
В соответствии с поставленной целью работы необходимо решить задачу непрерывного горизонтирования опорной платформы
313
ГПК перед началом работы и в процессе выполнения работ по перемещению грузов, предотвращения отрыва опор от грунта при внезапном проседании последнего под какой-либо из опор, поддержания опорной платформы на оптимальной высоте с максимальным запасом управляемости углами наклона платформы.
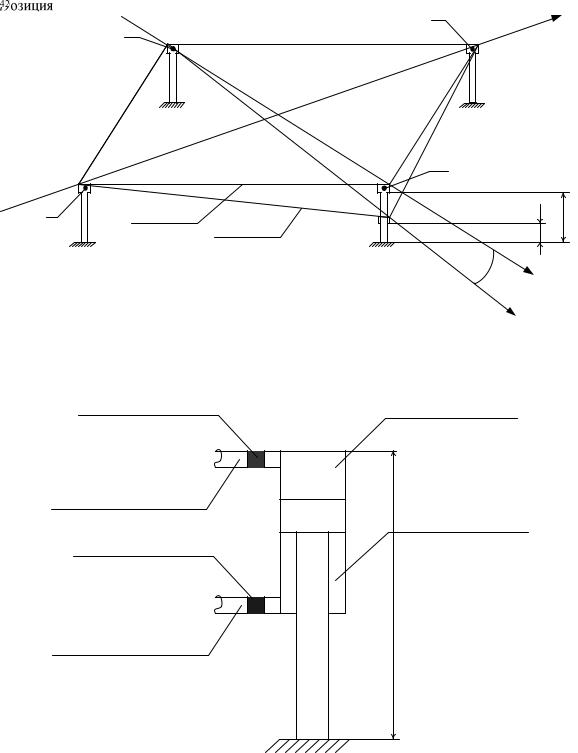
Рис. 6.1. Изменение информационного параметра при изменении длины аутригера № 4 (пример)
Датчик давления рп1 |
Поршневая полость |
Поршневая магистраль |
|
|
Штоковая полость |
Датчик давления рш1 |
|
|
l1 |
Штоковая магистраль |
|
Рис. 6.2. Гидроцилиндр опоры № 1
314