Материал: 2426
Во всех вычислительных экспериментах в рабочей области присутствовали препятствия, задаваемые по (3.154) (тестовая схема).
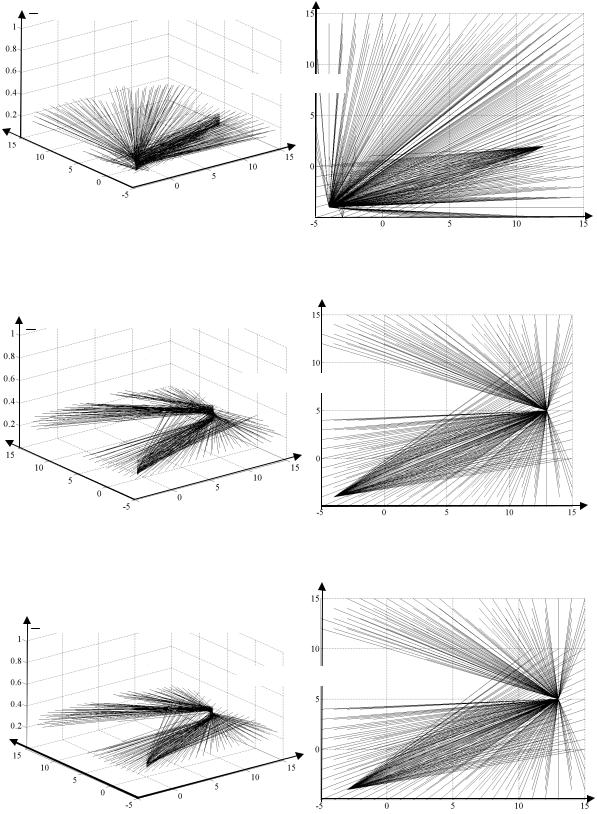
Оптимальная по геометрическому критерию (5.8) траектория перемещения груза (5.14), определенная для тестовой схемы препятствий, приведена на рис. 5.7.
Y0, УЛЕ
Конец
Начало Z0, УЛЕ
X0, УЛЕ
O0
Рис. 5.7. Оптимальная по геометрическому критерию траектория перемещения общего груза
Примеры зависимостей частных критериев (а, б, в, г, д) и комплексного критерия (е) для отдельного крана (№ 1) от ряда варьируемых параметров при фиксированных значениях всех прочих варьируемых параметров, демонстрирующие работоспособность комплекса методик, приведены на рис. 5.8.
На рис. 5.8, а приведен пример зависимостей частного критерия устойчивости 3-го уровня ξ от линейной координаты X0 пространства рабочей области при перемещении отдельным краном груза (отдельной точки его закрепления) вдоль предварительно найденной линейной траектории точки строповки (т.н. «развертка» критерия ξ по траектории) при различных углах поворота базового шасси q6,1 в пределах q6,1=[–1,997; 2,942] рад. Приведенный диапазон значений q6,1 является допускаемым при выполнении условия непересечения крана № 1 с препятствиями и объемным телом второго крана.
На рис. 5.8, б показана одна из зависимостей ξ(X0) при угле поворота базового шасси q6,1=0 рад, а также в качестве иллюстрации – определенные по данной зависимости, т.е. для всей траектории перемещения характерной точки строповки, значения критериев устойчивости 2-го уровня (ξ )1 и (ξmin)1.
300
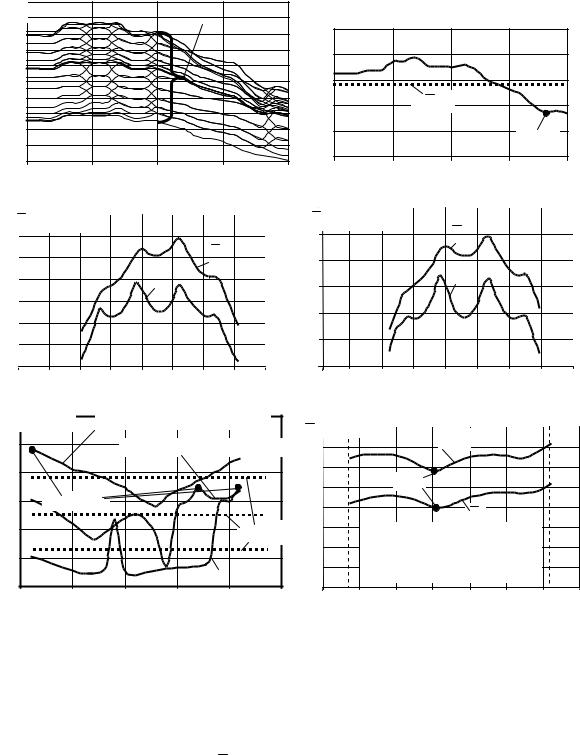
q3,1. Т.е. рис. 5.8, а иллюстрирует получение зависимостей на рис. 5.8, в.
На рис. 5.8, д приведены в качестве примера зависимости частного критерия 3-го уровня q10Н, характеризующего управляемость положением груза, от линейной координаты X0 пространства рабочей области (т.н. «развертка» критерия q10Н по траектории) при трех различных положениях точек начала координат базового шасси крана № 1. Зависимости получены с учетом выполнения условия непересечения подвижных звеньев крана № 1 с препятствиями. Проиллюстрировано также определение по данным зависимостям значений критериев 2-го уровня: (q10Н )1 и (q10Нmax)1.
На рис. 5.8, е приведены в качестве примера зависимости двух комплексных критериев 1-го уровня ( χ и χmax) от угла поворота базового шасси крана № 1 (q6,1) при фиксированных значениях всех прочих
варьируемых параметров (q1,1; q3,1; q1,2; q3,2; q6,2). Выделены две точки минимальных значений критериев на двух графиках (min), соответст-
вующие наиболее благоприятному значению угла поворота базового шасси крана № 1 (q6,1). Значения переменной q6,1 на графиках ограничены условиями непересечения с препятствиями и ГПК № 2.
Результаты 1-й серии экспериментов. В первой серии в качестве критерия эффективности использовалось значение среднего относительного критерия χ по (5.4).
Описанная ниже последовательность действий выполнялась для каждого сочетания координат базовых шасси двух кранов q1,1; q3,1; q1,2; q3,2; q6,1; q6,2, характеризующих постановку двух кранов в пределах рассматриваемой области.
По найденной траектории груза, заданной в виде последовательности (3.50), по методике, описанной в разделе 5.5, вычислялись значения частных критериев эффективности 3-го уровня (ξ и q10Н) в каждой точке дискретной траектории для каждого ГПК ik [1;2] отдельно. Затем также для каждого ГПК ik вычислялись значения частных критериев эффективности 2-го уровня для всей траектории (ξik и (q10Н )ik ,
ik [1;2]). По четырем значениям критериев эффективности 2-го уровня (ξ1 , ξ2 , (q10Н )1, (q10Н )2 ) вычислялось значение среднего относительного критерия эффективности χ .
С учетом большого количества варьируемых технологических
параметров (q1,1; q3,1; q1,2; q3,2; q6,1; q6,2) использовалось представление результатов на трехмерных графиках в виде линий, соединяющих
302
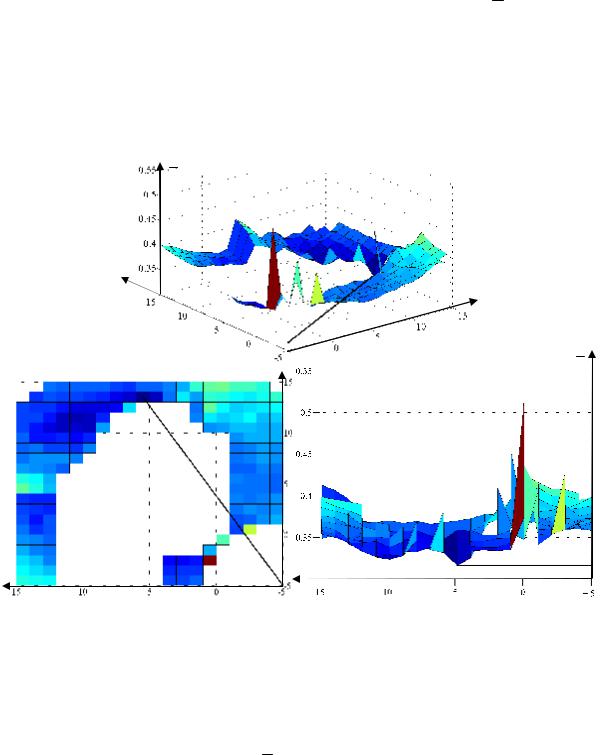
точки начала систем координат базовых шасси двух кранов. При этом положение точки начала системы координат базового шасси одного крана варьировалось на равномерной сетке во вложенных циклах, а положение точки начала системы координат базового шасси второго крана выбиралось по наименьшему значению критерия χ среди всех возможных положений в рассматриваемой области (рис. 5.9). Углы поворота двух базовых шасси при этом также оптимизировались в двух самых внутренних вложенных циклах (см. рис. 5.6).
Белые области на рис. 5.9 соответствуют недопустимым положениям базового шасси крана № 2 при любых сочетаниях углов q6,1; q6,2 с учетом препятствий и взаимопересечений.
χ
X0, УЛЕ
Z0, УЛЕ
χ
Z0, УЛЕ
X0, УЛЕ
X0, УЛЕ
Рис. 5.9. Пример построения одной из линий, соединяющих точку начала системы координат базового шасси крана № 1 в ее заданном фиксированном положении (q1,1=–5 УЛЕ; q3,1= –5 УЛЕ) и оптимизируемую точку начала системы координат базового шасси крана № 2
Высота линии на рис. 5.9 принималась равной значению комплексного критерия эффективности χ , вычисленного с учетом предварительной оптимизации значений технологических параметров q6,1; q6,2 для рассматриваемого сочетания линейных координат [q1,1; q3,1]; [q1,2; q3,2].
303