Материал: 2426
Для каждой точки Ris,1 выполняется проверка на попадание
внутрь прямоугольной области 1 базового шасси крана № 1 (рис. 5.4, а) согласно схеме на рис. 5.4, б. Пусть текущая рассматриваемая точка, выражаемая вектором Ris,1 , имеет в системе координат базового
шасси крана № 1 координаты в горизонтальной плоскости [xis,1; zis,1]. Тогда условие ее попадания в прямоугольную область с координата-
ми точек вершин 1,2,3,4 (см. рис. 5.4, б) [x1,1; z1,1], [x2,1; z2,1], [x3,1; z3,1], [x4,1; z4,1] соответственно будет иметь вид
(xis,1>x1,1) (xis,1<x4,1) (zis,1>z1,1) (zis,1>z1,1), |
(5.11) |
где – знак логического умножения (конъюнкции).
В случае выполнения условия (5.11) переменная Cross индикатора пересечения двух базовых шасси принимается равной 1, что соответствует пересечению, т.е. недопустимому состоянию. Все выполняемые циклы при этом прерываются, и осуществляется переход к п. 8.
Аналогичная проверка по условию (5.11) для точки Ris,1 выполня-
ется на попадание внутрь прямоугольных областей 2, 3, …, no базового шасси крана № 1 (см. рис. 5.4, а).
7. В цикле is [1; cs] точки множества { Ris } на поверхности базового шасси крана № 1 переносятся в систему координат базового
шасси крана № 2: |
|
Ris,2 =T1,2 × Ris . |
(5.12) |
Для каждой точки Ris,2 выполняется проверка |
на попадание |
внутрь прямоугольных областей 1, 2, 3, …, no базового шасси крана
№2 аналогично п. 6 методики.
8.Вывод результатов: Cross. Окончание работы алгоритма.
Блок-схема алгоритма проверки пересечения объемных тел двух грузоподъемных кранов приведена на рис. 5.5. Разработанный алгоритм и методика на его основе характеризуются повышенным быстродействием и малой вычислительной сложностью.
295

5.5. Методика оптимизации технологических параметров совмещенного рабочего процесса двух грузоподъемных кранов, перемещающих общий груз
Метод оптимизации технологических параметров совмещенного рабочего процесса двух ГПК, перемещающих общий груз, сводится к полному перебору вариантов при дискретно изменяемых оптимизируемых параметрах [187]. Для постановки задачи, описанной в разделе 5.1, необходимо оптимизировать постоянные значе-
ния неуправляемых координат двух кранов [q1,1; q2,1; q3,1; q6,1]; [q1,2; q2,2; q3,2; q6,2] (мест постановки в пределах рабочей области) и пере-
менные значения управляемых координат [q7,1; q8,1; q9,1; q10,1]; [q7,2; q8,2; q9,2; q10,2] в виде траекторий в пространстве конфигураций кранов по принятым критериям эффективности ( χ либо χmax, методика
раздела 5.2).
Многократное решение задачи при различных значениях исходных данных обобщенных координат базовых шасси двух кранов [q1,1;
q2,1; q3,1; q6,1]; [q1,2; q2,2; q3,2; q6,2] с последующим сравнением значений оптимизированной целевой функции ( χ либо χmax) для каждого вари-
анта позволяет оптимизировать значения перечисленных неуправляе-
мых и управляемых [q7,1; q8,1; q9,1; q10,1]; [q7,2; q8,2; q9,2; q10,2] технологи-
ческих параметров совмещенного рабочего процесса двух ГПК по принятым критериям эффективности, т.е. расположить базовые шасси двух кранов оптимальным образом относительно начального и конечного положений перемещаемого груза с учетом ограничений, создаваемых препятствиями и запретными для расположения кранов зонами, в т. ч. условием взаимного непересечения объемных тел кранов.
Проведенные предварительные исследования показали, что на графиках целевых функций в ряде расчетных случаев могут присутствовать области локальных минимумов, поэтому необходимо использовать метод полного перебора варьируемых параметров с определенным шагом дискретности.
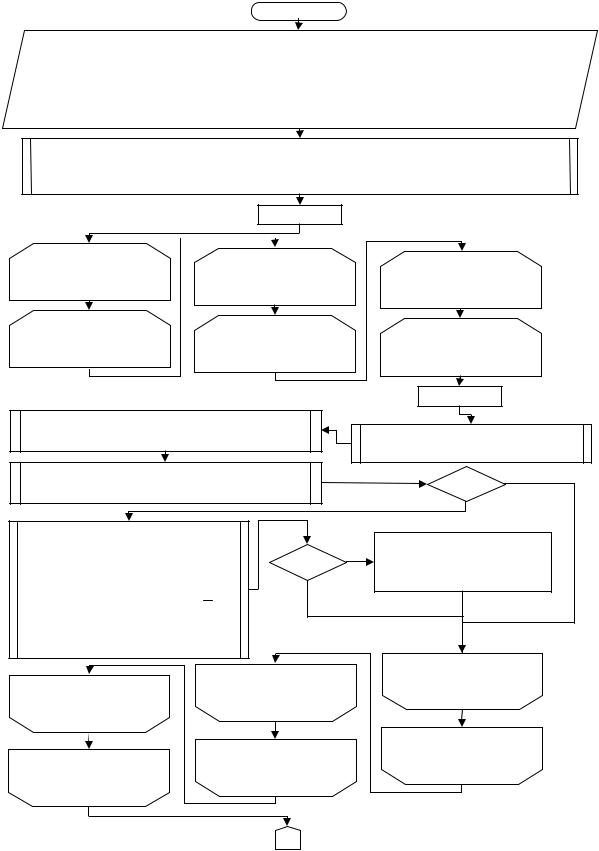
На рис. 5.6 приведена блок-схема алгоритма оптимизации технологических параметров совмещенного рабочего процесса двух ГПК, перемещающих общий груз.
Результатом работы алгоритма является значение глобального минимума целевой функции L* на рассматриваемой области положений базовых шасси двух кранов [xш0min; xш0max]; [zш0min; zш0max].
296
|
|
|
|
Пуск |
|
1 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ввод исходных данных: [xш0min; xш0max]; [zш0min; zш0max]; yш0; |
lш; [YПР]; ng; |
uш; |
||||||||||
u8;nЛ; uл;δopt;lзап_г;lзап_в;vлинпред;v7кпред;v8,1;v8,2;v9,1;v9,2;v9,3;v9,4;q9гран;mГР; mГРгран; |
||||||||||||
v10,1;v10,2;v10,3;v10,4;q8min;q8max;q9min;q9max;q10min;q10max; q7; q8; |
q9; q10; m1; m2; m3; |
|||||||||||
m4; x2,2; x3,31; y3,32; x3,33; x4,41; y3,42; y4,43; x2,54; α0; cГ1; cГ2; λ1; λ2; |
Rc1g =[xc1g; yc1g; zc1g]; |
|||||||||||
R |
=[xc2g; yc2g; zc3g]; { R |
}; { R |
}; { R |
}; { R |
|
}; |
ls; sнач; sкон |
|
|
|||
c2g |
|
|
ig |
is |
io3 |
io4 |
|
|
|
3 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Поиск траектории груза S*, оптимальной по геометрическому критерию на |
||||||||||||
основе линейно-угловых координат груза в геометрическом пространстве |
||||||||||||
препятствий, с использованием комплекса методик разделов 3.3 – 3.8 |
||||||||||||
|
|
|
|
L*=∞ |
4 |
|
|
|
|
|
|
|
q1,1 |
5 |
|
|
q1,2 |
|
6 |
|
|
|
q6,1 |
|
7 |
|
|
|
|
|
|
|
|
|
||||
q1,1=xш0min; q1,1≤xш0max; |
q1,2=xш0min; q1,2≤xш0max; |
|
q6,1=–π; q6,1≤ π; |
|
||||||||
q1,1= q1,1+ lш |
|
q1,2= q1,2+ lш |
9 |
|
|
q6,1= q6,1+ uш |
|
|
||||
q3,1 |
8 |
|
|
q3,2 |
|
|
|
|
q6,2 |
|
10 |
|
|
|
|
|
|
|
|
|
|
||||
q3,1=zш0min; q3,1≤zш0max; |
q3,2=zш0min; q3,2≤zш0max; |
|
q6,2=–π; q6,2≤ π; |
|
||||||||
q3,1= q3,1+ lш |
|
q3,2= q3,2+ lш |
|
|
|
q6,2= q6,2+ uш |
11 |
|
||||
|
|
|
|
|
12 |
|
|
|
L* =∞ |
13 |
||
Проверка пересечений крана № 1 |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
||||||
|
|
Проверка пересечений двух |
||||||||||
и препятствий по алгоритму раздела 4.8 |
|
|
||||||||||
|
|
|
|
|
14 |
кранов по методике раздела 5.4 |
||||||
Проверка пересечений крана № 2 |
|
|
|
|
15 |
Cross=1 |
Да |
|
||||
и препятствий по алгоритму раздела 4.8 |
|
|
|
|
|
Нет |
|
|
||||
16 |
|
|
|
|
|
|
|
|
|
|
18 |
|
Определение текущего значе- |
|
|
17 |
|
|
|
|
|
|
|||
|
|
Да |
L*=L; q1,1*=q1,1; q3,1*=q3,1; |
|||||||||
ния комплексного относи- |
|
|
||||||||||
тельного критерия эффектив- |
|
L<L* |
|
|
q1,2*=q1,2; q3,2*=q3,2; |
|
||||||
ности совмещенного рабочего |
|
Нет |
|
q6,1*=q6,1; q6,2*=q6,2 |
|
|||||||
|
|
|
|
|
|
|
||||||
процесса двух ГПК L= χ |
|
|
|
|
|
|
|
|
|
|
||
(L=χmax) по методике раздела |
|
|
|
20 |
|
|
|
|
21 |
|||
|
5.3 |
|
|
|
|
|
|
|
|
|||
19 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q6,2 |
|
|
|
|
|
|
|
q3,2 |
|
|
|
|
|
|
|
|
q3,1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
24 |
||
|
|
|
|
|
|
23 |
|
|
|
|
||
|
22 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q6,1 |
|
|
|
|
|
|
|
q1,2 |
|
|
|
|
|
|
|
|
q1,1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
Рис. 5.6. Блок-схема алгоритма оптимизации технологических параметров со- |
||||||||||||
вмещенного рабочего процесса двух ГПК, перемещающих общий груз (начало) |
||||||||||||
297
3 |
25 |
|
Нахождение траекторий движения q7,1=f(t); q8,1=f(t); q9,1=f(t); |
||
q10,1=f(t); q7,2=f(t); q8,2=f(t); q9,2=f(t); q10,2=f(t) подвижных звеньев |
||
двух кранов в их пространствах конфигураций по S*; q1,1*; q3,1*; |
||
q1,2*; q3,2*; q6,1*; q6,2* по методике раздела 4.3 |
26 |
|
Вывод результатов: L*; q1,1*; q3,1*; q1,2*; q3,2*; |
27 |
|
q6,1*; q6,2*; q7,1=f(t); q8,1=f(t); q9,1=f(t); |
|
Останов |
q10,1=f(t); q7,2=f(t); q8,2=f(t); q9,2=f(t); q10,2=f(t)
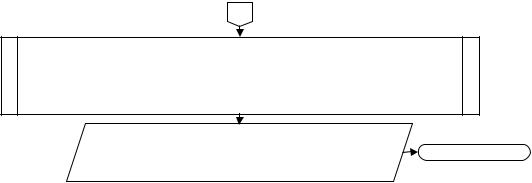
Рис. 5.6. Блок-схема алгоритма оптимизации технологических параметров совмещенного рабочего процесса двух ГПК, перемещающих общий груз (окончание)
Также определяются соответствующие глобальному минимуму L* значения варьируемых технологических параметров положения базо-
вых шасси двух кранов q1,1*; q3,1*; q1,2*; q3,2*; q6,1*; q6,2* и рабочего оборудования обоих кранов во всех точках траектории груза S*: q7,1=f(t);
q8,1=f(t); q9,1=f(t); q10,1=f(t); q7,2=f(t); q8,2=f(t); q9,2=f(t); q10,2=f(t).
Разработанный комплекс методик позволяет решать задачи синтеза оптимальных по комплексному критерию эффективности значений технологических параметров двух ГПК, перемещающих общий груз, т.е. оптимизировать значения управляемых координат и расположения базовых шасси двух ГПК в пределах рассматриваемой области с учетом заданных ограничений, произвольно расположенных препятствий и выполнения условия непересечения объемных тел двух ГПК.
5.6. Результаты исследования комплекса методик оптимизации технологических параметров совмещенного рабочего процесса двух грузоподъемных кранов, перемещающих общий груз, по предложенным критериям эффективности
Приведены некоторые результаты вычислительных экспериментов по проверке работоспособности комплекса предложенных методик оптимизации технологических параметров совмещенного рабочего процесса двух ГПК, перемещающих общий груз. В качестве оптимизируемых технологических параметров выступали координаты ба-
зовых шасси двух кранов q1,1*; q3,1*; q1,2*; q3,2*; q6,1*; q6,2* и рабочего оборудования обоих кранов во всех точках траектории груза S*:
q7,1=f(t); q8,1=f(t); q9,1=f(t); q10,1=f(t); q7,2=f(t); q8,2=f(t); q9,2=f(t); q10,2=f(t).
298

Исходные данные задачи, описанные в разделе 5.1 монографии, принимали следующие численные значения (линейные размеры в УЛЕ, угловые – в рад):
|
sнач = [xн0; yн0; zн0; γн0; ωн0]=[0; 2; 5; 0; 0]; |
(5.13) |
|
sкон = [xк0; yк0; zк0; γк0; ωк0]= [10; 2; 5; 1,9635; 0]; |
|
||
векторы характерных точек строповки: R |
=[xc1g; yc1g; zc1g; 1]Т=[0,25; |
||
|
c1g |
|
|
0; 1,5; 1]; R |
=[xc2g; yc2g; zc3g; 1]Т=[0,25; 0; –1,5; 1]; |
|
|
c2g |
|
|
|
точки на поверхности объемного тела груза:
{ Rig }={[0,25;0;1;1]; [0,25;0;0;1]; [0,25;0;–1;1]; [–0,25;0;1;1];
[–0,25;0;0;1]; [–0,25;0;–1;1]; [0;0,25;1;1]; [0;0,25;0;1]; [0;0,25;–1;1]; [0;–0,25;1;1]; [0;–0,25;0;1]; [0;–0,25;–1;1]; [0,25;0;1,5;1]; [0,25;0;–1,5;1]; [–0,25;0;1,5;1]; [–0,25;0;–1,5;1]; [0;0,25;1,5;1]; [0;0,25;–1,5;1]; [0;–0,25;1,5;1]; [0;–0,25;–1,5;1]; [0,25;0;0,5;1]; [0,25;0;–0,5;1]; (5.14)
[–0,25;0;0,5;1]; [–0,25;0;–0,5;1]; [0;0,25;0,5;1]; [0;0,25;–0,5;1]; [0;–0,25;0,5;1]; [0;–0,25;–0,5;1]},
{ Ris }; { Rio3 }; { Rio4 } – согласно (4.198) – (4.200).
При оптимизации технологических параметров совмещенного рабочего процесса двух ГПК, перемещающих общий груз, рассматривалась область положений начала системы координат базового шасси
xш0, zш0 (в УЛЕ) [xш0min; xш0max]×[zш0min; zш0max] = [–5; 15]×[–5; 15]. |
|
||
Значения параметров yш0; lш; [YПР]; ng; uш; u8; nЛ; |
uл; δopt; lзап_г; |
||
lзап_в; vлинпред; v7кпред; v8,1; v8,2; v9,1; v9,2; v9,3; v9,4; q9гран; |
mГР; |
mГРгран; v10,1; |
|
v10,2; v10,3; v10,4; q8min; q8max; q9min; q9max; q10min; q10max; |
q7; |
q8; q9; |
q10; |
m1; m2; m3; m4; x2,2; x3,31; y3,32; x3,33; x4,41; y3,42; y4,43; x2,54; α0; |
cГ1; cГ2 |
при- |
|
нимались равными заданным в разделе 4.10. Матрица препятствий [Yпр] задавалась по (3.154).
Значения весовых коэффициентов λ1 и λ2 комплексного критерия (целевой функции L*) оценки траектории и положения двух ГПК в пространстве (мест установки кранов), описанного в разделе 5.2, варьировались согласно (5.6) от 0,1 до 0,9.
Все конструктивные и технологические параметры соответствовали стреловому крану марки «Урал КС 45721 Челябинец».
Было проведено 2 серии вычислительных экспериментов, в которых в качестве критерия эффективности совмещенного рабочего процесса двух ГПК использовались χ (1-я серия) и χmax (2-я серия), определяемые по (5.4) и (5.5) соответственно.
299