Материал: 2426

Кроме того, оптимизация по энергетическому или стоимостному критерию требует рассмотрения задачи настолько большой размерности, что при существующих уровнях развития и быстродействия вычислительной техники затруднено практическое использование данных критериев для совмещенного рабочего процесса.
Это обуславливает целесообразность декомпозиции общей поставленной задачи оптимизации технологических параметров совмещенного рабочего процесса, имеющей высокую сложность и большую размерность, на несколько последовательно выполняемых подзадач малой размерности: 1) независимый поиск траектории груза S*, оптимальной по геометрическому критерию на основе линейноугловых координат груза в геометрическом пространстве препятствий, с использованием комплекса методик разделов 3.3 – 3.8; 2) по найденной траектории груза S* в неподвижной системе координат и известным постоянным в системе груза координатам характерных точек строповки определение траекторий двух характерных точек строповки в неподвижной системе координат; 3) определение траекторий управляемых координат двух кранов, соответствующих траекториям точек строповки в неподвижной системе координат как нижних граничных значений из диапазонов с учетом препятствий и конструктивных ограничений; 4) определение значений частных критериев оценки эффективности совмещенного рабочего процесса для каждой точки траектории и для всей траектории управляемых координат каждого из двух кранов; 5) определение значений комплексных относительных критериев оценки эффективности совмещенного рабочего процесса согласно (5.4), (5.5).
В качестве целевой функции L, по которой осуществляется поиск траектории груза, предлагается использовать выражение вида
L=(Lлин)1+(Lлин)2, |
(5.8) |
где (Lлин)1 и (Lлин)2 – длины траекторий двух характерных точек строповки для кранов № 1 и 2 соответственно, определяемые по выражениям вида (3.116).
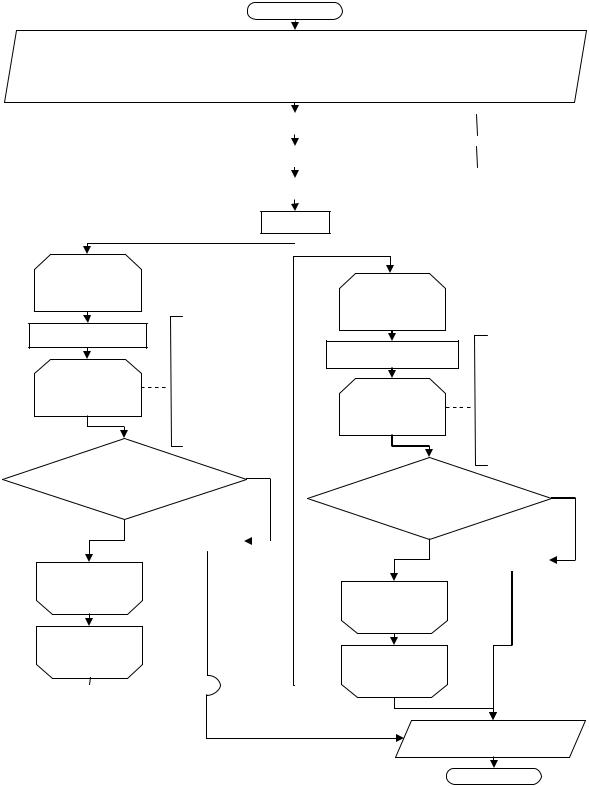
В результате декомпозиции становится возможным практическое использование комплекса разработанных методик оптимизации технологических параметров совмещенного рабочего процесса двух ГПК, перемещающих общий груз, по предложенным критериям эффективности (рис. 5.3).
291
5.4. Методика проверки пересечения двух грузоподъемных кранов
При оптимизации технологических параметров совмещенного рабочего процесса двух ГПК, к которым относятся координаты базовых шасси в пространстве (места постановки кранов), возникает необходимость проверки пересечения объемных тел двух грузоподъемных кранов, которую можно осуществить при помощи математического моделирования. Это позволяет избежать аварийных ситуаций на физических объектах в реальном режиме работы.
Предлагается следующая быстродействующая методика проверки пересечения объемных тел двух грузоподъемных кранов, учитывающая специфику задачи. В случае обеспечения горизонтального положения опорных платформ кранов при помощи систем автомати-
ческого горизонтирования [58, 84, 98, 125, 126, 156, 158 , 162] и допу-
щения о том, что вертикальные координаты микрорельефа опорной поверхности под опорными элементами двух кранов различаются незначительно (в пределах ходов штоков гидроцилиндров выносных опор), может быть использован быстрый алгоритм проверки попадания точки внутрь прямоугольника на плоскости. Также сделано допущение о том, что в случае отсутствия пересечений двух базовых шасси кранов № 1 и 2 пересечения подвижных звеньев двух кранов можно избежать.
Описание методики проверки пересечения объемных тел двух грузоподъемных кранов
1.Задается количество прямоугольных областей базового шасси
икоординаты точек вершин всех областей из множества { Ris } без
учета припуска ls. По значению припуска ls и координатам множества точек { Ris } на поверхности объемного тела базового шасси от-
дельного крана в локальной системе координат шасси O1X1Y1Z1 определяются либо задаются координаты вершин прямоугольных облас-
тей базового шасси [x1,1; z1,1], [x2,1; z2,1], [x3,1; z3,1], [x4,1; z4,1] для каждой прямоугольной области (№ 1, 2, 3) соответственно.
2.По заданным координатам базовых шасси крана № 1 и крана
№2 [q1,1; q2,1; q3,1; q6,1] и [q1,2; q2,2; q3,2; q6,2] соответственно с использо-
ванием метода однородных координат [12, 72, 127] и зависимостей
вида (4.9), (4.10) формируются матрицы перехода от локальной системы координат базового шасси к неподвижной инерциальной систе-
292
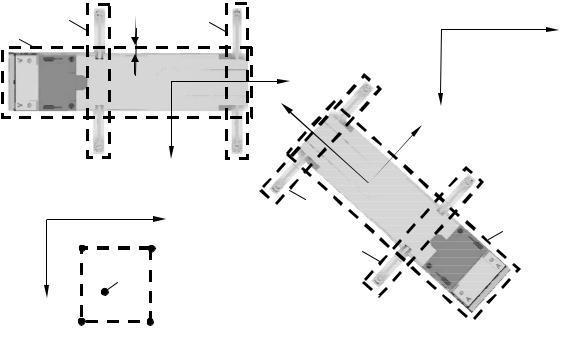
ме координат O0X0Y0Z0 (см. рис. 5.4, а): (T1)1 – матрица для крана № 1; (T1)2 – матрица для крана № 2.
3.Затем данные матрицы обращаются [74]. При этом формируются: [(T1)1]–1 – матрица, обратная матрице (T1)1 для крана № 1, соответствующая переходу от неподвижной системы координат O0X0Y0Z0
ксистеме координат базового шасси крана № 1; [(T1)2]–1 – матрица, обратная матрице (T1)2, для крана № 2, соответствующая переходу от неподвижной системы координат O0X0Y0Z0 к системе координат базового шасси крана № 2.
4.Формируются матрица T1,2 перехода от системы координат базового шасси крана № 1 к системе координат базового шасси крана
№ 2, и матрица T2,1 перехода от системы координат базового шасси крана № 2 к системе координат базового шасси крана № 1:
|
T1,2=(T1)1∙ [(T1)2]–1; |
T2,1=(T1)2∙ [(T1)1]–1. |
(5.9) |
||
|
2 |
3 |
|
O0 |
X0 |
1 |
|
ls |
|
||
|
|
|
|
|
|
а) |
|
O1 |
X1 |
|
|
|
X1 |
|
Z0 |
||
|
|
|
Z1 |
||
Кран № 1 |
|
|
|
||
|
|
|
|
||
|
|
|
|
|
Кран № 2 |
|
|
X1 |
|
O1 |
|
|
|
|
3 |
1 |
|
|
2 [x2,1; z2,1] |
3 [x3,1; z3,1] |
|
|
|
|
|
2 |
|
||
|
[xis,1; zis,1] |
|
|
|
|
б) |
|
|
|
|
|
|
Z1 |
|
|
|
|
|
1 [x1,1; z1,1] |
4 [x4,1; z4,1] |
|
|
|
Рис. 5.4. Расчетная схема для проверки пересечения базовых шасси двух ГПК (вид в плане)
5.Переменная Cross индикатора пересечения двух базовых шасси принимается равной 0, что соответствует отсутствию пересечений, т.е. допустимому состоянию.
6.В цикле is [1; cs] точки множества { Ris } на поверхности базо-
вого шасси крана № 2 переносятся в систему координат базового шасси крана № 1:
293