Материал: 2426
qk8B, qk8Н, qk8, рад
qk8B
qk8
x1,УЛЕ
|
qk8Н |
z1, УЛЕ |
|
Рис. 4.74. Зависимость диапазонных qk8B, qk8Н и оптимального qk8 значений управляемой координаты q8 в конечной точке положения груза от положений базового шасси q1, q3 (серия экспериментов № 5)
qn9B, qn9Н, qn9, УЛЕ
qn9B
x1, УЛЕ
qn9
qn9Н
z1, УЛЕ
Рис. 4.75. Зависимость диапазонных qn9B, qn9Н и оптимального qn9 значений управляемой координаты q9 в начальной точке положения груза от положений базового шасси q1, q3 (серия экспериментов № 5)
280
qk9B, qk9Н, qk9, УЛЕ
qk9
qk9B
qk9Н
x1, УЛЕ
z1, УЛЕ
Рис. 4.76. Зависимость диапазонных qk9B, qk9Н и оптимального qk9 значений управляемой координаты q9 в конечной точке положения груза от положений базового шасси q1, q3 (серия экспериментов № 5)
qn10B, qn10Н, qn10, УЛЕ
qn10B
qn10
x1, УЛЕ
|
qn10Н |
|
z1, УЛЕ |
|
|
||
|
|
|
|
|
|
|
|
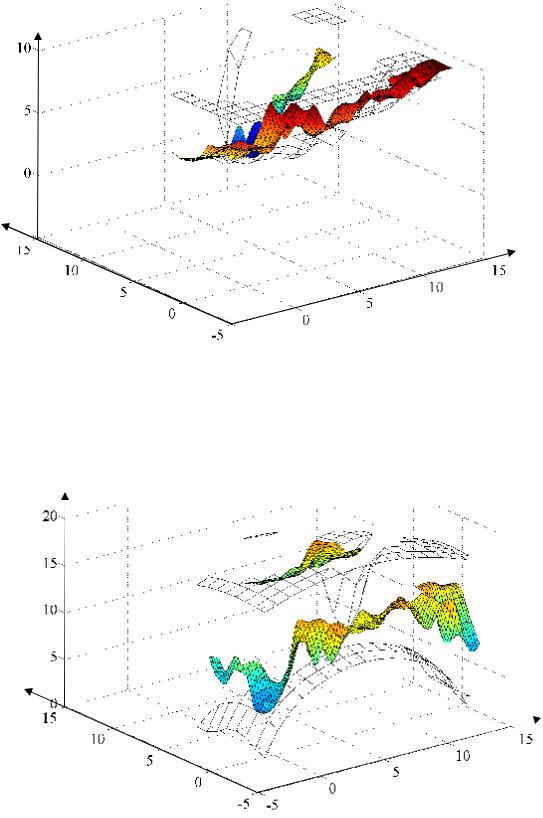
Рис. 4.77. Зависимость диапазонных qn10B, qn10Н и оптимального qn10 значений управляемой координаты q10 в начальной точке положения груза от положений базового шасси q1, q3 (серия экспериментов № 5)
281
qk10B, qk10Н, qk10, УЛЕ
qk10B
qk10
x1, УЛЕ
qk10Н |
z1, УЛЕ |
|
Рис. 4.78. Зависимость диапазонных qk10B, qk10Н и оптимального qk10 значений управляемой координаты q10 в конечной точке положения груза от положений базового шасси q1, q3 (серия экспериментов № 5)
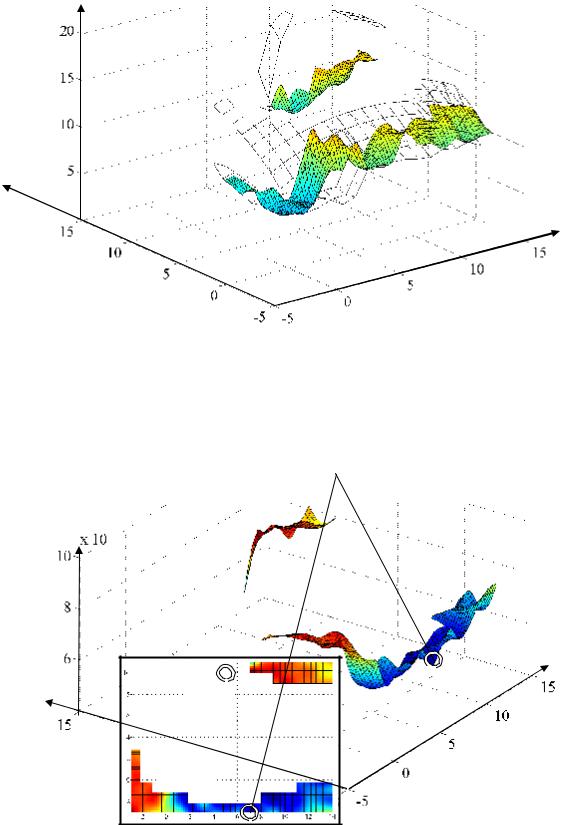
Точка условного глобального минимума на рассматриваемой области, Ae=5,8292·10–3 л
–3
Ae, л
|
x1, УЛЕ |
z1, УЛЕ |
|
–3 |
|
|
|
|
x1, УЛЕ |
|
Конец |
Начало  z1, УЛЕ
z1, УЛЕ
Рис. 4.79. Зависимость энергетического критерия эффективности Ae от положений базового шасси q1, q3 при наличии препятствий и ограничении на предельную линейную скорость груза (серия экспериментов № 5)
282
Конец
Y0, УЛЕ
Конец
X0, УЛЕ
Z0, УЛЕ
Начало
Начало
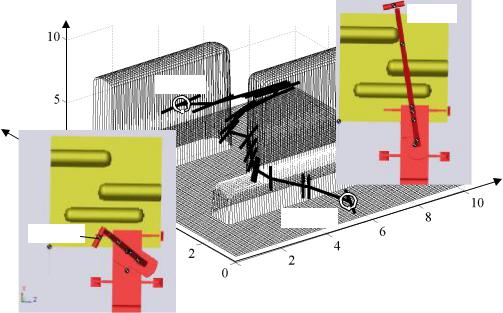
Рис. 4.80. Пример траектории, минимизирующей критерий энергетических затрат Ae и полученной при оптимальных значениях технологических параметров одиночного ГПК q1, q3, qn8, qn9, qn10, qk8, qk9, qk10
Учитывались ограничения по максимальным рациональным скоростям изменения управляемых координат ГПК вида (4.127), (4.133) и (4.138), в рабочей области присутствовали препятствия, задаваемые по (3.154) (тестовая схема).
Анализ результатов серии экспериментов № 5 позволяет сделать выводы, аналогичные выводам серии № 3: наличие препятствий в рабочей области добавляет на график зависимости энергетического критерия Ae от начального и конечного значений управляемых координат q8, q9, q10 множество локальных экстремумов, что непредсказуемо меняет положение точки глобального минимума (рис. 4.72) на указанном графике и вследствие этого точки глобального минимума q1, q3 на графике зависимости целевой функции от положений базового шасси.
Наличие препятствий значительно уменьшает область возможного расположения базового шасси в пределах рассматриваемой области (рис. 4.73–4.78). Значение целевой функции (энергетического критерия) для оптимальной траектории составляет Ae=5,8292·10–3 л, что примерно в 2 раза больше соответствующего значения Ae оптимальной траектории в серии экспериментов № 4 и обусловлено необходимостью обхода препятствий (рис. 4.79).
Пример траектории, обладающей минимальным значением критерия энергетических затрат Ae и полученной при оптимальных зна-
283
чениях технологических параметров (q1=–3,04 УЛЕ; q3=6,98 УЛЕ; qn8=1,251 рад; qk8=0,751 рад; qn9=4,709 УЛЕ; qk9=9,7 УЛЕ; qn10=14,33
УЛЕ; qk10=13,72 УЛЕ) в серии экспериментов № 5 с препятствиями, приведен на рис. 4.80.
Разработанный комплекс методик позволяет оптимизировать в заданных пределах с учетом возможных ограничений технологические параметры рабочего процесса ГПК, в частности положение базового шасси в пространстве, угол подъема стрелы, величину выдвижения телескопического звена и длину грузового каната от оголовка стрелы в заданных начальной и конечной точках положения груза, при любой форме препятствий в рабочей области. При этом решается задача синтеза оптимальных значений указанных технологических
параметров q1, q3, qn8, qn9, qn10, qk8, qk9, qk10, а также задача синтеза оптимальной по заданному критерию эффективности траектории пере-
мещения груза в пространстве конфигураций машины. Разработанный комплекс методик также может быть в перспек-
тиве использован как составная часть методики более высокого иерархического уровня для решения задач синтеза оптимальных конструктивных параметров ГПК. Для этого необходимо при помощи многократного решения задачи оптимизации технологических параметров для различных значений варьируемых конструктивных параметров и при различной конфигурации препятствий в рабочей области осуществить подбор оптимальных значений требуемых конструктивных параметров.
5. РАЗРАБОТКА МЕТОДИК ОПТИМИЗАЦИИ ПАРАМЕТРОВ СОВМЕЩЕННОГО РАБОЧЕГО ПРОЦЕССА ДВУХ ГРУЗОПОДЪЕМНЫХ КРАНОВ, ПЕРЕМЕЩАЮЩИХ ОБЩИЙ ГРУЗ
5.1. Постановка задачи оптимизации технологических параметров совмещенного рабочего процесса двух грузоподъемных кранов, перемещающих общий груз
В соответствии с поставленной целью работы необходимо решить задачу синтеза оптимальных значений технологических параметров совмещенного рабочего процесса двух ГПК, перемещающих общий груз согласно заданным критериям эффективности.
284