Материал: 2426
Перемещение грузов двумя стреловыми кранами является работой повышенной опасности. Опасность может возникнуть вследствие неправильного распределения нагрузок на краны, расцепления груза со стропами из-за несогласованных действий крановщиков или разных скоростей механизмов подъема и перемещения кранов, участвующих в работе, раскачивания груза при наклонном положении ка-
натов и т.д. [129, 169, 170].
Значения критериев оценки эффективности совмещенного рабочего процесса двух ГПК, перемещающих общий груз, определяются на основе обобщенных координат двух отдельно стоящих стреловых кранов.
При постановке задачи и при ее дальнейшем решении приняты все те же допущения, которые были приняты в разделе 3.1 для геометрической задачи синтеза траектории груза в декартовых координатах рабочей области с препятствиями. Также были приняты все допущения из разде-
ла 4.1.
|
|
|
|
|
|
Препятствия |
|
Начальная |
|
|
|
|
|
||||
|
|
|
Zg |
|
точка sнач |
|
|
|
|
|
|||||||
Конечная |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
||||||||||
точка sкон |
|
|
|
|
|
|
(xн0, yн0, zн0, |
|
|
|
Y1 |
|
|||||
(xк0, yк0, zк0, |
|
|
|
|
|
|
γн0, ωн0) |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
γк0, ωк0) |
|
|
|
|
|
|
|
|
|
|
|
|
|
sш1 |
|
||
|
|
Yg |
|
|
|
|
|
|
|
|
|
Yg |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Zg |
(xш10,yш10,zш10,ωш20) |
|||
|
|
Xg |
|
Og |
|
|
|
|
Xg |
|
|
Z0 |
X1 |
||||
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
Og |
|
|
|
||
|
|
|
|
|
|
|
|
|
Y1 |
|
|
|
|
|
|
|
|
X |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X1 |
|
|
|
|
|
|
|
|
|
O1 |
|
|
|
sш2 |
|
|
|
|
|
|
Z1 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
(xш20,yш20,zш20,ωш20 |
) |
|
|
O |
1 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
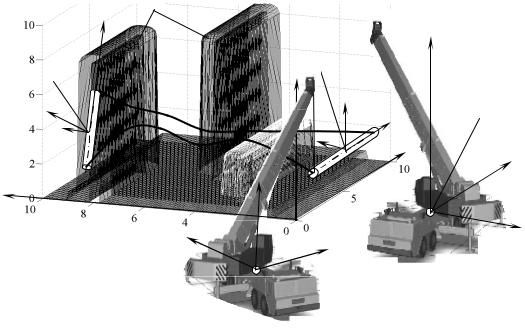
Рис. 5.1. Начальное и конечное положения перемещаемого груза, возможные начальные положения двух ГПК (пример)
Дополнительно были приняты допущения о том, что в процессе перемещения общего груза двумя стреловыми кранами точки закрепления (строповки) груза для каждого крана имеют постоянные координаты в собственной локальной системе координат груза OgХgYgZg и массовая доля груза, приходящаяся на каждый кран, постоянна.
Заданы линейные и угловые координаты груза в начальной sнач и в конечной sкон (рис. 5.1) точках траектории груза в пространстве по (3.1).
285
Заданы точки закрепления (строповки) груза для каждого крана в локальной системе координат груза OgХgYgZg:
Rc1g =[xc1g; yc1g; zc1g; 1]Т – для ГПК № 1;
R |
=[xc2g; yc2g; zc2g; 1]Т – для ГПК № 2. |
(5.1) |
c2g |
|
|
Кроме того, заданы координаты множества точек { Rig }, ig [1; cг]
на поверхности объемного тела груза, определяющие его форму, координаты множества точек { Ris }, is [1; cs] на поверхности объемного
тела шасси отдельного крана, определяющие его форму. Задано значение ls – припуска на линейные размеры прямоугольных областей, определяющих форму базового шасси крана при проверке пересечения двух ГПК.
В локальных системах координат стрелы O3Х3Y3Z3 и телескопического звена O4Х4Y4Z4 отдельного крана заданы координаты множеств
точек { Rio3 }, io3 [1; co3] и { Rio4 }, io4 [1; co4] на поверхности объемных тел стрелы и телескопического звена соответственно, определяющие их форму. Предполагается использование двух автомобиль-
ных ГПК одинаковой конструкции. |
|
|
|
В качестве исходных данных |
задачи выступают |
параметры |
|
[xш0min; xш0max]; [zш0min; zш0max]; yш0; lш; [YПР]; ng; uш; u8; |
nЛ; |
uл; δopt; |
|
lзап_г; lзап_в; vлинпред; v7кпред; v8,1; v8,2; v9,1; v9,2; v9,3; v9,4; q9гран; |
mГР; mГРгран; |
||
v10,1; v10,2; v10,3; v10,4; q8min; q8max; q9min; |
q9max; q10min; q10max; |
q7; |
q8; q9; |
q10; m1; m2; m3; m4; x2,2; x3,31; y3,32; x3,33; x4,41; y3,42; y4,43; x2,54; α0; cГ1; cГ2,
описанные в разделе 4.1.
Также исходными данными являются значения весовых коэффициентов λ1 и λ2 комплексного критерия (целевой функции L*) оценки траектории и положения двух ГПК в пространстве (мест установки кранов), описанного в разделе 5.2.
Необходимо осуществить планирование траектории груза в среде с препятствиями, описанными при помощи массива [YПР], из начального положения груза sнач в конечное sкон в пространстве конфигураций двух ГПК. Дополнительно необходимо оптимизировать значение целевой функции L*.
Результатом выполнения методики являются постоянные оптимизированные значения неуправляемых обобщенных координат двух ГПК в пространстве
sш1=[xш10; yш10; zш10; ωш10]=[q1,1; q2,1; q3,1; q6,1];
sш2=[xш20; yш20; zш20; ωш20]=[q1,2; q2,2; q3,2; q6,2] (5.2)
286
и временные зависимости синхронизированных значений управляемых координат двух ГПК
q7,1=f(t); q8,1=f(t); q9,1=f(t); q10,1=f(t); q7,2=f(t); q8,2=f(t);
q9,2=f(t); q10,2=f(t). (5.3)
5.2.Обоснование критериев эффективности совмещенного рабочего процесса двух грузоподъемных кранов, перемещающих общий груз
Поскольку совместная работа по перемещению груза двумя или несколькими кранами выполняется сравнительно редко, в исключительных случаях, например при перемещении крупногабаритных грузов или груза большой массы, превышающей грузоподъемность отдельного крана, то при выполнении данного вида работ определяющими становятся критерии безопасности и координатной точности работы группы кранов. Значения данных критериев определяются на основе обобщенных координат двух отдельно стоящих стреловых кранов.
В качестве частных критериев нижнего иерархического уровня оценки эффективности совмещенного рабочего процесса двух ГПК, перемещающих общий груз, предлагается использовать критерий устойчивости ξ на основе нормальных реакций в опорных элементах, описанный в разделе 4.4 и определяемый по (4.102), и минимально возможную с учетом как конструктивных ограничений, так и возможных препятствий величину обобщенной координаты q10Н [длина грузового каната от оголовка стрелы до точки строповки груза определяется по методике раздела 4.3 и корректируется по зависимостям
(4.165) – (4.177)].
Величина q10Н, как и величина критерия устойчивости ξ, может быть определена как в статике, так и в каждый момент временного отрезка реализации траектории перемещения груза отдельным стреловым краном. Причем оптимальными являются большие значения критерия устойчивости ξ, что соответствует большей устойчивости отдельного самоходного крана, и меньшие значения длины грузового каната q10Н, что соответствует лучшей управляемости и создает предпосылки для повышения координатной точности положения груза со стороны отдельного ГПК. Предлагается использовать по два интегральных частных критерия 2-го уровня на основе указанных дис-
287
ξ(t)≤ξкрит, |
(5.7) |
то значения комплексных относительных критериев оценки эффективности χ и χmax принимаются равными верхнему предельному, наименее оптимальному значению, т.е. 1.
Комплексные |
|
|
|
|
|
|
Уровень 1 |
χmax |
|
|
χ |
|
|
относительные |
|
|
|
|
|
|
|
|
|
|
|
|
|
критерии |
|
|
|
|
|
|
Уровень 2 |
ξmin |
|
|
|
|
|
q10Нmax |
|
|
q10Н |
|||
ξ |
|||||||||||||
Частные |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
критерии |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Уровень 3 |
|
|
ξ |
|
|
|
|
q10Н |
|
|
|||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
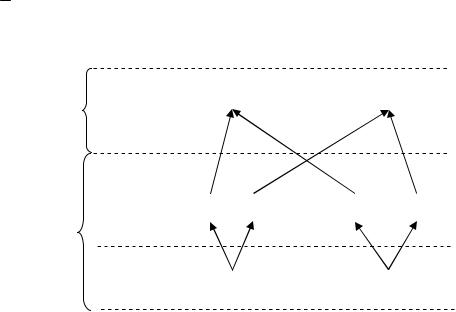
Рис. 5.2. Взаимосвязь критериев эффективности совмещенного рабочего процесса двух ГПК
Взаимосвязь критериев эффективности совмещенного рабочего процесса двух ГПК, перемещающих общий груз, представлена на рис. 5.2. Комплексные относительные критерии первого уровня безразмерны и универсальны.
5.3.Методика определения значений комплексных относительных критериев эффективности совмещенного рабочего процесса двух грузоподъемных кранов, перемещающих общий груз
Для заданных положений двух самоходных кранов, перемещающих общий груз в виде координат их мест постановки вида (5.2), предлагается следующая методика определения значений критериев эффективности совмещенного рабочего процесса вида (5.4), (5.5).
Уникальный и важный характер работ по перемещению двумя кранами общего груза позволяет пренебречь такими критериями оптимальности рабочего процесса, как энергетический и стоимостный, и вести оптимизацию по критериям безопасности и координатной точности.
289