Материал: 2426
qn8B, qn8Н, qn8, рад
qn8B
qn8
x1, УЛЕ
|
qn8Н |
|
z1, УЛЕ |
|
|
||
|
|
|
|
|
|
|
|
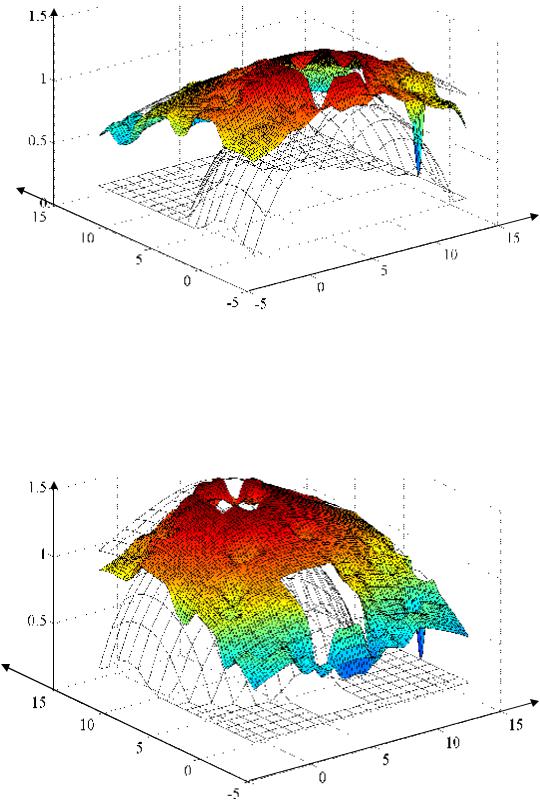
Рис. 4.65. Зависимость диапазонных qn8B, qn8Н и оптимального qn8 значений управляемой координаты q8 в начальной точке положения груза от положений базового шасси q1, q3 (серия экспериментов № 4)
qk8B, qk8Н, qk8, рад
qk8B
qk8
x1,УЛЕ
qk8Н
z1, УЛЕ
Рис. 4.66. Зависимость диапазонных qk8B, qk8Н и оптимального qk8 значений управляемой координаты q8 в конечной точке положения груза от положений базового шасси q1, q3 (серия экспериментов № 4)
275
qn9B, qn9Н, qn9, УЛЕ |
qn9B |
qn9
qn9Н
x1, УЛЕ
z1, УЛЕ
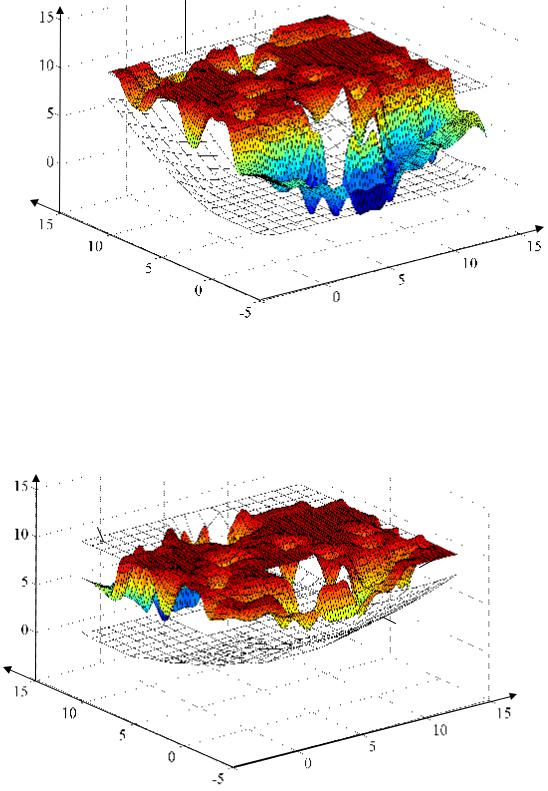
Рис. 4.67. Зависимость диапазонных qn9B, qn9Н и оптимального qn9 значений управляемой координаты q9 в начальной точке положения груза от положений базового шасси q1, q3 (серия экспериментов № 4)
qk9B, qk9Н, qk9, УЛЕ
qk9B
qk9
qk9Н
x1, УЛЕ
z1, УЛЕ
Рис. 4.68. Зависимость диапазонных qk9B, qk9Н и оптимального qk9 значений управляемой координаты q9 в конечной точке положения груза от положений базового шасси q1, q3 (серия экспериментов № 4)
276
qn10B, qn10Н, qn10, УЛЕ
qn10B
qn10
x1, УЛЕ
|
qn10Н |
|
z1, УЛЕ |
|
|
||
|
|
|
|
|
|
|
|
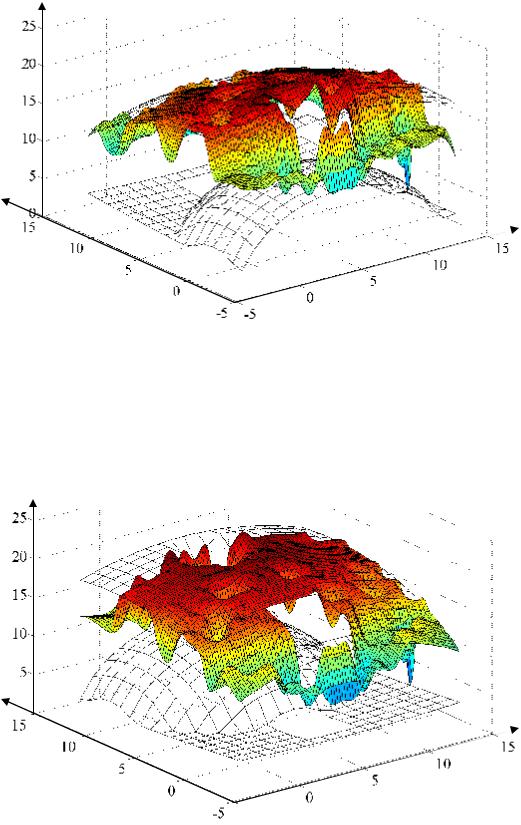
Рис. 4.69. Зависимость диапазонных qn10B, qn10Н и оптимального qn10 значений управляемой координаты q10 в начальной точке положения груза от положений базового шасси q1, q3 (серия экспериментов № 4)
qk10B, qk10Н, qk10, УЛЕ
qk10B
qk10
x1, УЛЕ
z1, УЛЕ
qk10Н
Рис. 4.70. Зависимость диапазонных qk10B, qk10Н и оптимального qk10 значений управляемой координаты q10 в конечной точке положения груза от положений базового шасси q1, q3 (серия экспериментов № 4)
277
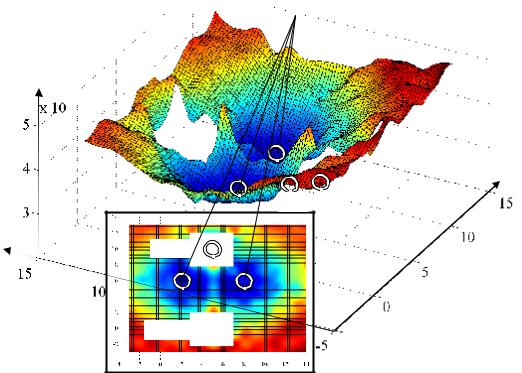
Точки условного глобального минимума на рассматриваемой области, Ae=2,8743·10–3 л
–3
Ae, л
z1, УЛЕ
№1 №2
x1, УЛЕ |
x1, УЛЕ |
|
Конец |
||
|
Начало 
z1, УЛЕ
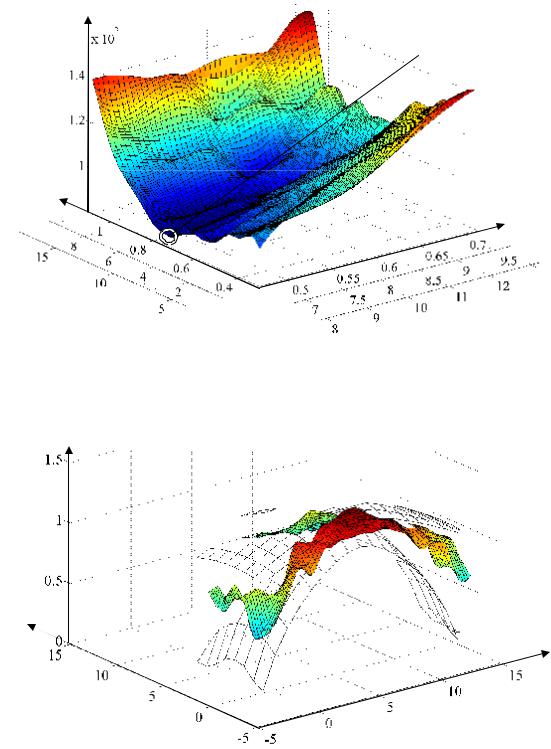
Рис. 4.71. Зависимость энергетического критерия эффективности Ae от положений базового шасси q1, q3 при отсутствии препятствий и наличии ограничений на предельную линейную скорость груза
(серия экспериментов № 4)
На рис. 4.65–4.70 приведены зависимости диапазонных [qn8В;
qn8Н]; [qn9В; qn9Н]; [qn10В; qn10Н] [qk8В; qk8Н]; [qk9В; qk9Н]; [qk10В; qk10Н] и оп-
тимальных qn8, qn9, qn10, qk8, qk9, qk10 значений управляемых координат. На рис. 4.71 приведена зависимость энергетического критерия Ae.
Выводы по 4-й серии экспериментов аналогичны выводам по 2-й серии. Симметрия наблюдается только относительно линии, соединяющей точки начального и конечного положений условного центра груза. Относительно вертикальной плоскости между начальным и конечным положениями груза, равноудаленной от них, симметрия не соблюдается. Вследствие этого две симметричные точки условного глобального минимума на рассматриваемой области находятся между начальным и конечным положениями груза, но смещены ближе к конечному положению груза (см. рис. 4.71), вследствие того, что затраты времени, область глобального минимума которых находится за конечным положением груза, оказывают определенное влияние и на энергетические/стоимостные затраты.
278
Результаты 5-й серии экспериментов. В данной серии экспери-
ментов в качестве критерия эффективности использовалось значение абсолютного количества топлива, израсходованного ДВС ГПК Ae (энергетический критерий).
|
|
|
Точка минимума № 1, |
|
–2 |
||
Ae, л |
|
|
Ae=8,4895·10–3 л |
|
qn10, qn9, qn8, рад
qk8, qk9, qk10, рад
Рис. 4.72. Зависимость энергетического критерия эффективности Ae от начального и конечного значений управляемых координат q8, q9, q10 при постоянных координатах базового шасси (УЛЕ) q1= –1; q3= –3 (серия экспериментов № 5)
qn8B, qn8Н, qn8, рад
qn8B
qn8
x1, УЛЕ
|
qn8Н |
|
z1, УЛЕ |
|
|
||
|
|
|
|
|
|
|
|
Рис. 4.73. Зависимость диапазонных qn8B, qn8Н и оптимального qn8 значений управляемой координаты q8 в начальной точке положения груза от положений базового шасси q1, q3 (серия экспериментов № 5)
279