Материал: 2426
qn9B, qn9Н, qn9, УЛЕ |
qn9B |
qn9
qn9Н
x1, УЛЕ |
z1, УЛЕ |
|
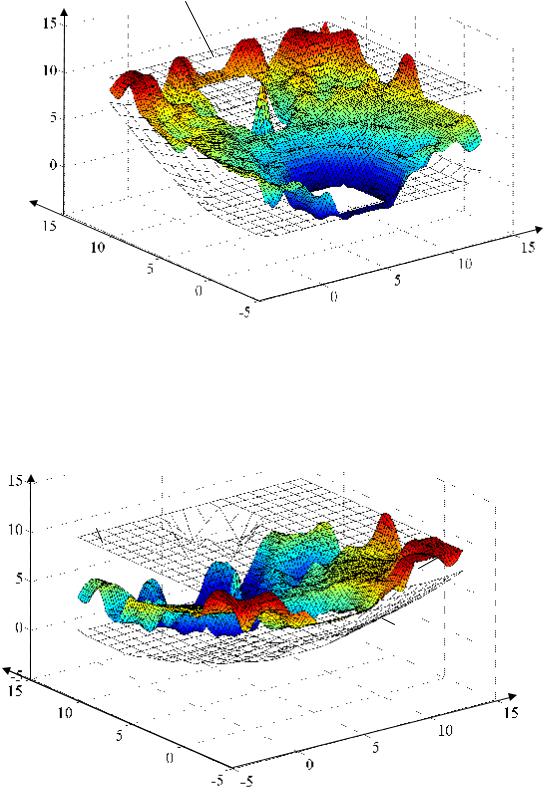
Рис. 4.48. Зависимость диапазонных qn9B, qn9Н и оптимального qn9 значений управляемой координаты q9 в начальной точке положения груза от положений базового шасси q1, q3 (серия экспериментов № 2)
qk9B, qk9Н, qk9, УЛЕ
qk9B
qk9
qk9Н
|
|
|
z1, УЛЕ |
x1, УЛЕ |
|
||
|
|
|
|
|
|
|
|
Рис. 4.49. Зависимость диапазонных qk9B, qk9Н и оптимального qk9 значений управляемой координаты q9 в конечной точке положения груза от положений базового шасси q1, q3 (серия экспериментов № 2)
265
qn10B, qn10Н, qn10, УЛЕ
qn10B
qn10
qn10Н
x1, УЛЕ |
z1, УЛЕ |
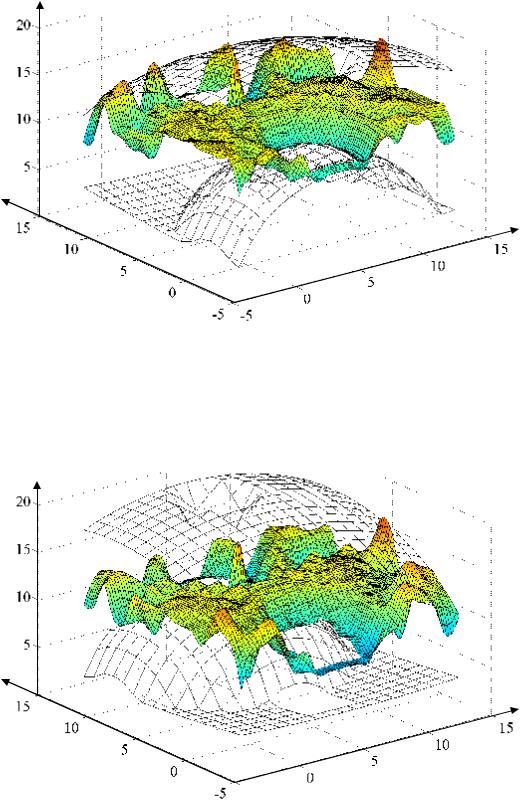
Рис. 4.50. Зависимость диапазонных qn10B, qn10Н и оптимального qn10 значений управляемой координаты q10 в начальной точке положения груза от положений базового шасси q1, q3 (серия экспериментов № 2)
qk10B, qk10Н, qk10, УЛЕ
qk10B
qk10
x1, УЛЕ |
qk10Н |
z1, УЛЕ |
|
||
|
|
Рис. 4.51. Зависимость диапазонных qk10B, qk10Н и оптимального qk10 значений управляемой координаты q10 в конечной точке положения груза от положений базового шасси q1, q3 (серия экспериментов № 2)
266
Точки условного глобального минимума на рассматриваемой области, T=15,55 с
T, c
z1, УЛЕ
 x1, УЛЕ
x1, УЛЕ
x1, УЛЕ |
Конец |
№ 1 № 2
Начало
z1, УЛЕ
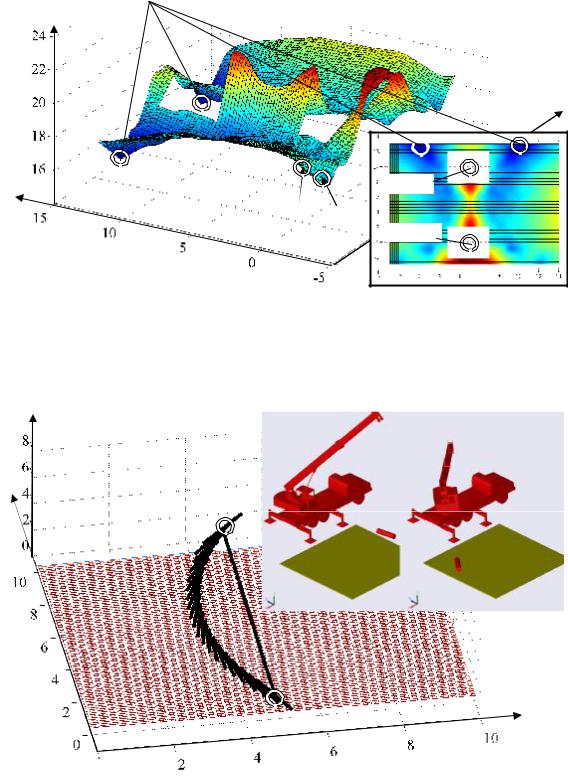
Рис. 4.52. Зависимость временного критерия эффективности T от положений базового шасси q1, q3 при ограничении на предельную линейную скорость груза vлин пред= 0,4 УЛЕ/с (серия экспериментов № 2)
Y0, УЛЕ
X0, УЛЕ
Конец
Начало Конец
Z0, УЛЕ
Начало
Рис. 4.53. Пример траектории, оптимальной по временному критерию T при отсутствии препятствий в рабочей области, при положениях базового шасси q1=4; q3=14 УЛЕ
267
На рис. 4.44 и 4.45 в качестве примера приведены графики зависимостей временного критерия T от начального и конечного значений управляемых координат q8, q9, q10 при двух различных положениях базового шасси в пространстве: q1= –1; q3= –3 и q1= –3; q3= –3 УЛЕ. Значения глобальных минимумов на данных графиках несколько выше, чем на аналогичных зависимостях из первой серии экспериментов (см. рис. 4.35 и 4.36) вследствие действующих ограничений на скорость перемещения груза.
На рис. 4.46–4.51 приведены зависимости диапазонных ([qn8В;
qn8Н]; [qn9В; qn9Н]; [qn10В; qn10Н] [qk8В; qk8Н]; [qk9В; qk9Н]; [qk10В; qk10Н]) и оп-
тимальных (qn8, qn9, qn10, qk8, qk9, qk10) значений управляемых координат. На рис. 4.52 приведена зависимость временного критерия T.
Выводы по 2-й серии экспериментов аналогичны выводам по 1-й серии, за исключением того, что для графика временного критерия T, в отличие от 1-й серии экспериментов, симметрия наблюдается только относительно линии, соединяющей точки начального и конечного положений условного центра груза. Относительно вертикальной плоскости между начальным и конечным положениями груза, равноудаленной от них, симметрия не соблюдается. Вследствие этого две симметричные точки условного глобального минимума на рассматриваемой области находятся за конечным положением груза и ближе к последнему, чем к начальному положению груза (см. рис. 4.52).
Значение целевой функции (временного критерия, или времени реализации) для оптимальной траектории составляет T=15,55 с, что примерно в 3 раза больше времени реализации оптимальной траектории в серии экспериментов № 1, и не приводит к значительному раскачиванию и колебаниям груза.
Пример траектории, оптимальной по временному критерию T при отсутствии препятствий в рабочей области, при положениях базового шасси q1=4; q3=14 УЛЕ приведен на рис. 4.53.
Результаты 3-й серии экспериментов. В данной серии экспери-
ментов в качестве критерия эффективности также использовалось значение минимального времени перемещения T, учитывались ограничения по максимальным рациональным скоростям изменения управляемых координат ГПК вида (4.127), (4.133) и (4.138), в рабочей области присутствовали препятствия, задаваемые по (3.154) (тестовая схема).
Анализ результатов серии экспериментов № 3 позволяет сделать выводы о том, что наличие препятствий в рабочей области добавляет на графики зависимостей временного критерия T от начального и ко-
268
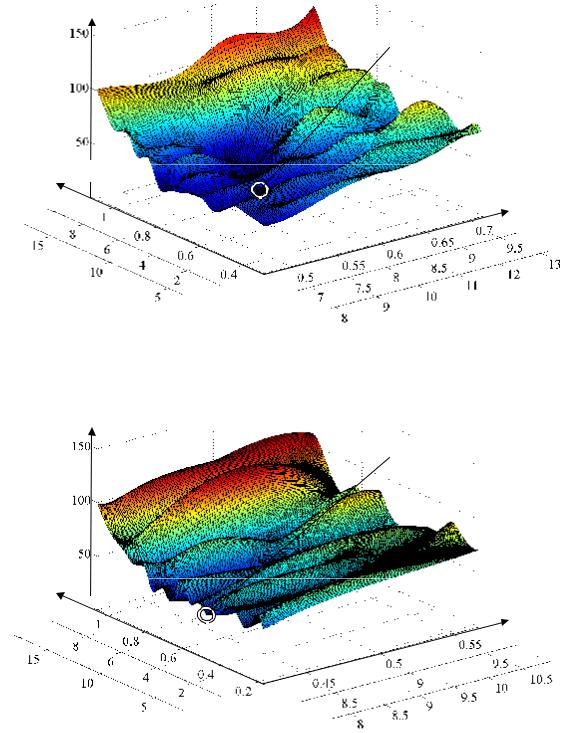
нечного значений управляемых координат q8, q9, q10 множество локальных экстремумов, что непредсказуемо меняет положение точки глобального минимума (рис. 4.54, 4.55) на указанных графиках и вследствие этого точки глобального минимума на графике зависимости целевой функции от положений базового шасси q1, q3.
T, с
Точка минимума № 1, T=35,6 с
qn10, qn9, qn8, рад
qk8, qk9, qk10, рад
Рис. 4.54. Зависимость временного критерия эффективности T от начального и конечного значений управляемых координат q8, q9, q10 при постоянных координатах базового шасси (УЛЕ) q1= –1; q3= –3 (серия экспериментов № 3)
T, с
Точка минимума № 2, T=38,8 с
qk8, qk9, qk10, рад
Рис. 4.55. Зависимость временного критерия эффективности T от начального и конечного значений управляемых координат q8, q9, q10 при постоянных координатах базового шасси (УЛЕ) q1= –3; q3= –3 (серия экспериментов № 3)
269