Материал: 2426
qn9B, qn9Н, qn9, УЛЕ |
qn9B |
qn9
qn9Н
x1, УЛЕ
z1, УЛЕ
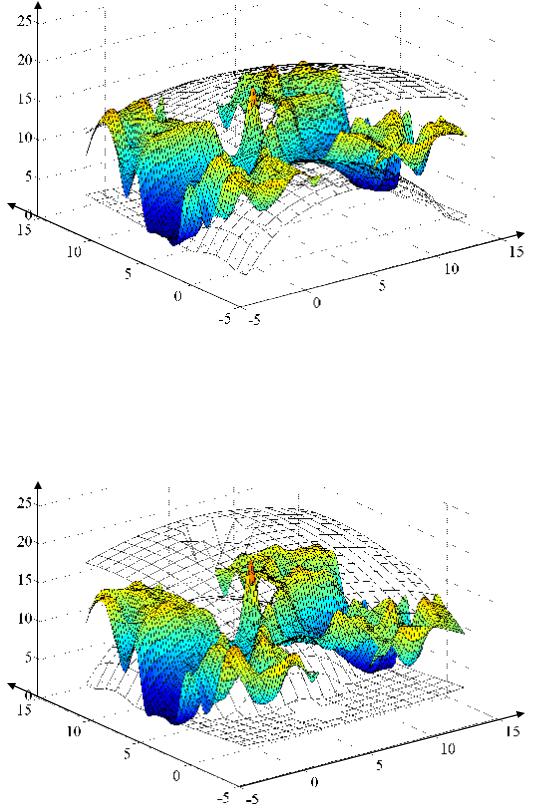
Рис. 4.39. Зависимость диапазонных qn9B, qn9Н и оптимального qn9 значений управляемой координаты q9 в начальной точке положения груза от положений базового шасси q1, q3 (серия экспериментов № 1)
qk9B, qk9Н, qk9, УЛЕ |
qk9B |
qk9
|
|
|
qk9Н |
|
|
|
|
x1, УЛЕ |
|
z1, УЛЕ |
|
|
|
|
|
|
|
|
|
Рис. 4.40. Зависимость диапазонных qk9B, qk9Н и оптимального qk9 значений управляемой координаты q9 в конечной точке положения груза от положений базового шасси q1, q3 (серия экспериментов № 1)
260
qn10B, qn10Н, qn10, УЛЕ
qn10B
qn10
|
|
|
|
z1, УЛЕ |
x1, УЛЕ |
|
|
||
qn10Н |
||||
|
|
|
|
|
|
|
|
|
|
Рис. 4.41. Зависимость диапазонных qn10B, qn10Н и оптимального qn10 значений управляемой координаты q10 в начальной точке положения груза от положений базового шасси q1, q3 (серия экспериментов № 1)
qk10B, qk10Н, qk10, УЛЕ
qk10B
|
|
|
qk10 |
|
|
|
qk10Н |
|
|
|
|
x1, УЛЕ |
|
z1, УЛЕ |
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.42. Зависимость диапазонных qk10B, qk10Н и оптимального qk10 значений управляемой координаты q10 в конечной точке положения груза от положений базового шасси q1, q3 (серия экспериментов № 1)
261
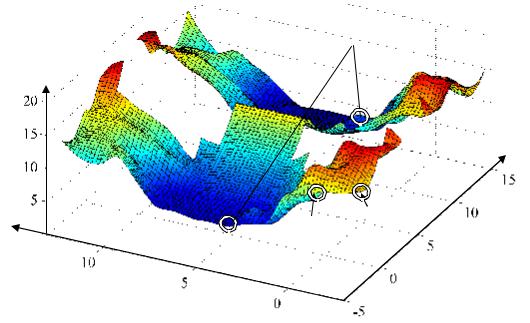
Точки условного глобального минимума на рассматриваемой области, T=4,3 с
T, c
z1, УЛЕ
№ 1 № 2
x1, УЛЕ
Рис. 4.43. Зависимость временного критерия эффективности T от положений базового шасси q1, q3 при отсутствии ограничений на предельную линейную скорость груза (серия экспериментов № 1)
Реализация траектории с минимальным временем перемещения при оптимальном сочетании значений всех варьируемых параметров приводит к значительным колебаниям и раскачиванию груза под действием сил и моментов инерции (T=4,3 с), что было подтверждено при имитационном моделировании на математической модели динамической системы. Для ГПК с гибким подвесом груза реализация подобных траекторий практически неприменима по соображениям безопасности [170]. Поэтому в последующих сериях экспериментов учитывались рациональные ограничения на скорости изменения обобщенных координат ГПК, задаваемые человеком-оператором и аппроксимированные регрессионными выражениями вида (4.127), (4.133) и (4.138).
Данное ограничение обычно приближенно соблюдается челове- ком-оператором при ручном режиме управления ГПК. Человекоператор при этом руководствуется своим опытом и навыками. Использование комплекса разработанных методик в САУ СГК позволит более точно рассчитывать допустимую скорость движения звеньев, исключить ошибки, связанные с человеческим фактором, более полно использовать ресурс и технологические возможности машины.
Результаты 2-й серии экспериментов. В данной серии экспери-
ментов, в отличие от 1-й серии, учитывались ограничения по максимальным рациональным скоростям изменения управляемых коорди-
262
нат ГПК вида (4.127), (4.133) и (4.138). Препятствия в рабочей области отсутствовали [YПР(i,k)=0 (i,k)]. В качестве критерия эффективности также использовалось значение минимального времени перемещения T.
T, с
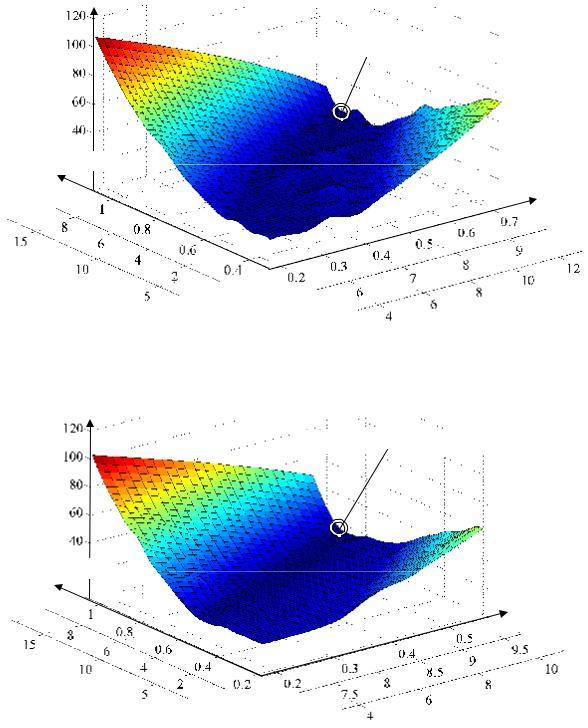
Точка минимума № 1, T=18,7 с
qn10, qn9, qn8, рад
qk8, qk9, qk10, рад
Рис. 4.44. Зависимость временного критерия эффективности T от начального и конечного значений управляемых координат q8, q9, q10 при постоянных координатах базового шасси (УЛЕ): q1= –1; q3= –3 (серия экспериментов № 2)
T, с
Точка минимума № 2, T=17,9 с
qn10, qn9, qn8, рад
qk8, qk9, qk10, рад
Рис. 4.45. Зависимость временного критерия эффективности T от начального и конечного значений управляемых координат q8, q9, q10 при постоянных координатах базового шасси (УЛЕ): q1= –3; q3= –3 (серия экспериментов № 2)
263
qn8B, qn8Н, qn8, рад
qn8B
qn8
z1, УЛЕ
qn8Н
x1, УЛЕ
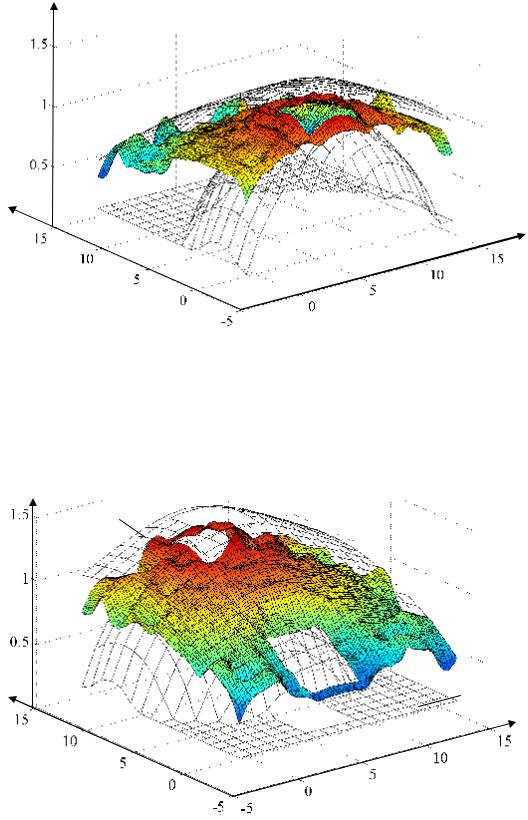
Рис. 4.46. Зависимость диапазонных qn8B, qn8Н и оптимального qn8 значений управляемой координаты q8 в начальной точке положения груза от положений базового шасси q1, q3 (серия экспериментов № 2)
qk8B, qk8Н, qk8, рад
qk8B
 qk8
qk8
qk8Н
x1, УЛЕ |
|
z1, УЛЕ |
|
|
|
|
|
|
Рис. 4.47. Зависимость диапазонных qk8B, qk8Н и оптимального qk8 значений управляемой координаты q8 в конечной точке положения груза от положений базового шасси q1, q3 (серия экспериментов № 2)
264