Материал: 2426
|
|
|
3 |
|
84 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||
|
|
Поиск кратчайшего пути между двумя вершинами |
|
|
|
||||
|
|
графа (sнач и sкон) при помощи алгоритма Дейкстры |
|
|
86 |
||||
|
|
p |
85 |
|
|
|
|
|
|
|
|
|
|
|
|
sn |
(p) |
||
|
|
|
|
|
|
|
|||
|
|
p=2; p≤sn; |
|
|
|
knл = nЛ |
|
å no |
|
|
|
p=p+1 |
|
87 |
|
|
|
p=1 |
|
|
|
|
|
|
|
p |
88 |
||
no(p–1)=(|q7(p)–q7(p–1)|)/ q7+(|q8(p)–q8(p–1)|)/ q8+ |
|
|
|||||||
|
|
|
|||||||
+(|q9(p)–q9(p–1)|)/ q9+(|q10(p)–q10(p–1)|)/ q10 |
|
|
p=1; |
|
p≤sn; |
|
|||
|
|
|
|
|
|
p=p+1 |
|
||
|
|
|
89 |
|
90 |
||||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|||
|
|
p |
|
|
|
no (p ) = ëno(p )× knë û |
|||
|
|
|
|
|
|
|
|
|
91 |
92 |
p |
|
Линейная интерполяция траектории в no(p) промежуточных точках на каждой дуге p [1; sn]
по известному алгоритму [65, 191]
93
Дискретная локальная оптимизация траектории по методике раздела 4.5
Определение уточненного значения целевой функции L 94 (T, Ae или C) оптимизированной траектории S по (4.4),
(4.5) или (4.6) соответственно
Нет |
95 |
Да |
96 |
|
|
L<L* |
|
L*=L; S*=S |
|
|
|
|
|
|
97 |
99 |
|
|
|
iqk8 |
|
100 |
|
|
|
|
Вывод результатов: L* |
||
|
|
|
98 |
(T*, Ae* или C*), S* |
Останов |
iqn8
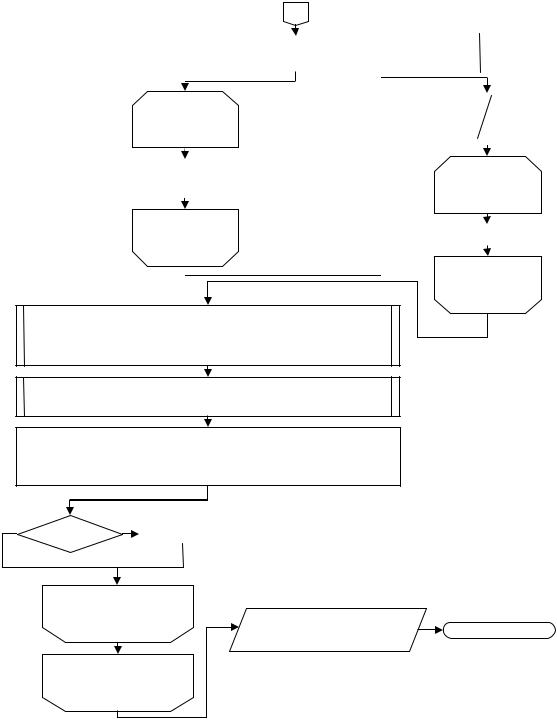
Рис. 4.32. Блок-схема модифицированного алгоритма ВДК поиска траектории перемещения груза в пространстве конфигураций ГПК (окончание)
8. Производится сравнение значения целевой функции (T, Ae или C), полученного на текущей итерации, и значения целевой функции, минимального для всего алгоритма (T*, Ae* или C*). В случае превышения значения целевой функции, минимального для всего алгоритма, над значением на текущей итерации, происходят коррекция, а также сохранение траектории:
251
T*=T; S*=S при T<T*; Ae*=Ae; S*=S при Ae<Ae*; |
|
C*=C; S*=S при C<C*. |
(4.197) |
Затем начинается следующая итерация алгоритма (п. 7), до тех пор пока не окончатся циклы по iqn8 и iqk8.
9. Вывод результатов: (T*, Ae* или C*), S*. Окончание работы алгоритма.
Блок-схема модифицированного алгоритма ВДК поиска траектории перемещения груза в пространстве конфигураций ГПК приведена на рис. 4.32.
Вычислительные реализации модифицированного алгоритма ВДК поиска траектории перемещения груза в пространстве конфигураций ГПК и описанной методики на его основе в средах Microsoft Visual C++ и MATLAB показали работоспособность и эффективность алгоритма для решения поставленной задачи.
4.9. Методика оптимизации технологических параметров рабочего процесса грузоподъемного крана по принятым критериям эффективности перемещения груза
Метод оптимизации технологических параметров рабочего процесса ГПК сводится к перебору вариантов при дискретно изменяемых оптимизируемых параметрах [187]. Применительно к ГПК, обладающему кинематической избыточностью, для постановки задачи, описанной в разделе 4.1, необходимо оптимизировать значения управляемых координат крана (q7, q8, q9, q10) в начальной и конечной точках траектории по принятому критерию эффективности (методика разде-
ла 4.8).
Многократное решение задачи при различных значениях исходных данных обобщенных координат базового шасси (q1, q2, q3) с последующим сравнением значений оптимизированной целевой функции для каждого варианта позволяет оптимизировать значения данных технологических параметров рабочего процесса ГПК по принятым критериям эффективности перемещения груза, т.е. расположить базовое шасси оптимальным образом относительно начального и конечного положений перемещаемого груза с учетом ограничений, создаваемых препятствиями и запретными для расположения крана зонами.
252
Проведенные исследования показали, что на графиках целевых функций могут присутствовать области локальных минимумов, поэтому необходимо использовать метод полного перебора варьируемых параметров с определенным шагом дискретности.
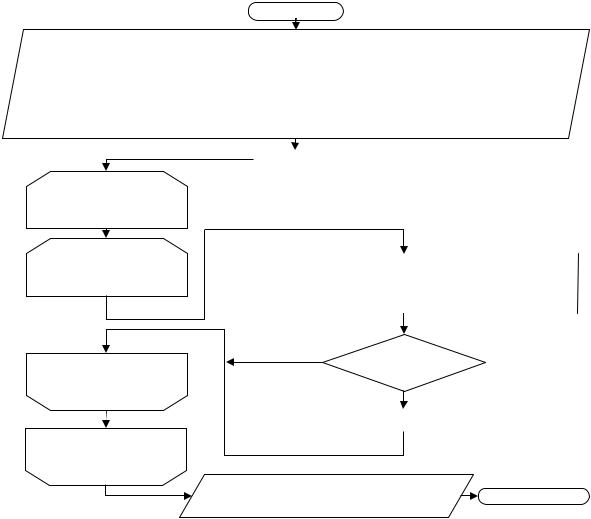
На рис. 4.33 приведена блок-схема алгоритма оптимизации технологических параметров рабочего процесса ГПК. В пределах заданной области положений начала системы координат базового шасси
[xш0min; xш0max]; [zш0min; zш0max] с использованием вложенных циклов для каждого сочетания координат xш0 и zш0 определяется оптимальное
значение целевой функции (L*)xш0,zш0 по методике раздела 4.8 с учетом кинематической избыточности механической системы ГПК.
|
Пуск |
1 |
|
|
|
2 |
|
|
Ввод исходных данных: [xш0min; xш0max]; [zш0min; zш0max]; yш0; lш; |
||||||
|
sнач=(xн0,yн0,zн0);sкон=(xк0,yк0,zк0);{ R |
|
};{ R |
io3 |
};{ R |
io4 |
}; |
{ R |
is |
|
|
|
|||
};[YПР];ng;δq7; uш; u8;nЛ; uл;δopt;lзап_г;lзап_в; v7кпред;v8,1;v8,2;v9,1;v9,2;v9,3; |
|||||||
ig |
|
|
|
|
|
|
|
v9,4;q9гран;mГР;mГРгран;v10,1;v10,2;v10,3;v10,4;q8min;q8max;q9min;q9max;q10min;q10max; q7; q8; |
|||||||||||
q9; q10;m1;m2;m3;m4;x2,2;x3,31;y3,32;x3,33;x4,41;y3,42;y4,43;x2,54;α0;cГ1;cГ2;k7,1,k7,2,k7,3,k8,1, |
|||||||||||
k8,2,k8,3,k8,4,k8,5,k8,6,k8,7,k9,1,k9,2,k9,3,k9,4,k9,5,k9,6,k10,1,k10,2,k10,3,k10,4 |
|
||||||||||
|
|
|
|
|
|
|
3 |
|
|
|
|
xш0 |
4 |
|
|
|
(L*)глоб=∞ |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
xш0= xш0min; xш0≤ xш0max; |
|
|
|
|
|
|
|
|
|
|
|
xш0= xш0+ |
lш |
|
|
|
|
|
|
|
|
|
|
zш0 |
5 |
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
zш0= zш0min; zш0≤ zш0max; |
|
|
|
|
Поиск траектории перемещения груза |
|
|||||
zш0= zш0+ |
lш |
|
|
|
в пространстве конфигураций стрелового |
|
|||||
|
|
|
|
|
|
крана по методике раздела 4.8 |
|
||||
|
7 |
|
|
|
|
Нет |
|
|
8 |
|
|
|
|
|
|
|
(L*)xш0,zш0≤(L*)глоб |
|
|||||
zш0 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
Да |
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
9 |
|
|
|
|
(L*)глоб=(L*)xш0,zш0; xш0*=xш0; zш0*=zш0 |
|
|
|||
xш0 |
|
|
|
|
|
|
|
|
11 |
|
12 |
|
|
|
|
|
|
|
* |
* |
* |
|
|
|
|
Вывод результатов: (L )глоб;xш0 |
;zш0 |
; |
|
|
|||||
|
|
|
q6;qn7;qk7;qn8;qk8;qn9;qk9;qn10;qk10 |
Останов |
|||||||
Рис. 4.33. Блок-схема алгоритма оптимизации технологических параметров рабочего процесса ГПК
Результатом работы алгоритма является значение глобального минимума целевой функции (L*)глоб на рассматриваемой области по-
253
ложений базового шасси [xш0min; xш0max]; [zш0min; zш0max], а также соответствующие глобальному минимуму (L*)глоб значения варьируемых
технологических параметров положения базового шасси (xш0*= q1*; zш0*= q3*; q6) и рабочего оборудования в начальной и конечной точках
траектории qn7; qk7; qn8; qk8; qn9; qk9; qn10; qk10.
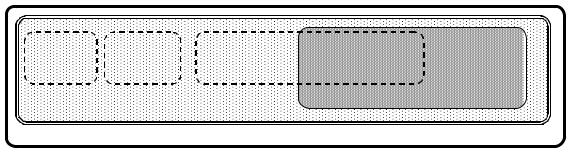
Иерархическая связь методики оптимизации технологических параметров рабочего процесса ГПК с методиками более низкого иерархического уровня в графических образах теории множеств приведена на рис. 4.34.
ОК ПУ ПП
ДЛО
ВДК
ОТП
Рис. 4.34. Иерархическая связь методики оптимизации технологических параметров рабочего процесса ГПК с прочими методиками в графической форме включения множеств
На рис. 4.34 присутствуют следующие обозначения: ОТП – методика оптимизации технологических параметров рабочего процесса; ВДК – методика планирования траектории в пространстве конфигураций ГПК на основе алгоритма вероятностной дорожной карты; ДЛО – методика дискретной локальной оптимизации найденной «грубой» траектории; ПУ – методика проверки положения ГПК в пространстве конфигураций по ограничению на устойчивость; ОК – методика решения обратной задачи кинематики (определения управляемых координат ГПК по известным координатам груза); ПП – алгоритм проверки пересечений с препятствиями промежуточных положений груза между двумя точками в пространстве конфигураций.
Разработанный комплекс методик позволяет решать задачи синтеза оптимальных значений технологических параметров ГПК на примере ГПК по критериям временных, энергетических и стоимостных затрат, в частности оптимизировать значения управляемых координат и расположение базового шасси в пределах рассматриваемой области с учетом заданных ограничений и произвольно расположенных препятствий.
254