Материал: 2426
4.10. Результаты исследования комплекса методик оптимизации технологических параметров рабочего процесса грузоподъемного крана по критериям эффективности, определяемым
впространстве конфигураций
Внастоящем разделе приведены некоторые результаты вычислительных экспериментов по проверке работоспособности комплекса предложенных методик оптимизации начального и конечного положений ГПК в пространстве его конфигураций с учетом угловой ориентации груза. В качестве оптимизируемых технологических пара-
метров выступали значения обобщенных координат q1, q3, q7, q8, q9, q10, причем обобщенные координаты q1 и q3 одинаковы для начального и конечного положений ГПК, а координаты q7, q8, q9, q10 – различ-
ны (qn7; qk7; qn8; qk8; qn9; qk9; qn10; qk10).
Исходные данные, описанные в разделе 4.1 работы, принимали следующие численные значения: yш0=q2=1,05 УЛЕ; sнач = [xн0; yн0; zн0]= =[0; 2; 5]; sкон = [xк0; yк0; zк0] =[10; 2; 5]; { Rig } – согласно (3.155);
{ Ris }={[2,6;0,5;2,8;1]; [2,6;0,5;1;1]; [2,6;0,5;-2,8;1]; [0;0,5;2,8;1];
[0;0,5;-2,8;1]; [-1,6;0,5;2,8;1]; [-1,6;0,5;-2,8;1]; [-3;0,5;1,25;1]; [-3;0,5;-1,25;1]; [-6,047;0,5;1,25;1]; [-6,047;0,5;0;1]; [-6,047;0,5;-1,25;1]; [2,6;0,5;-1;1]; [1,3;0,5;2,8;1]; [1,3;0,5;-2,8;1]; [-1,6;0,5;1,25;1]; [-1,6;0,5;-1,25;1]; [-4,5;0,5;1,25;1]; [-4,5;0,5;-1,25;1]; [-6,047;0,5;0,5;1]; [-6,047;0,5;-0,5;1]; [2,6;0,5;0;1]; [2,6;0,5;2;1]; [2,6;0,5;-2;1]; [2;0,5;2,8;1]; [2;0,5;-2,8;1]; [0,6;0,5;2,8;1]; [0,6;0,5;-2,8;1]; [-0,8;0,5;2,8;1]; [-0,8;0,5;-2,8;1]; [-5,2;0,5;1,25;1]; [-5,2;0,5;-1,25;1]; [-2,2;0,5;1,25;1];
[-2,2;0,5;-1,25;1]}; |
(4.198) |
{ Rio3 }= {[10;-0,2;0;1]; [9;-0,2;0;1]; [8;-0,2;0;1]; [7;-0,2;0;1]; [6;-0,2;0;1];
[5;-0,2;0;1]; [4;-0,2;0;1]; [3;-0,2;0;1]; [2;-0,2;0;1]; [1;-0,2;0;1]}; |
(4.199) |
{ Rio4 }= {[10;-0,2;0;1]; [9;-0,2;0;1]; [8;-0,2;0;1]; [7;-0,2;0;1]; [6;-0,2;0;1];
[5;-0,2;0;1]; [4;-0,2;0;1]; [3;-0,2;0;1]; [2;-0,2;0;1]; [1;-0,2;0;1]}; |
(4.200) |
δq7=π/2 рад; u8=0,05 рад; nЛ=20; lл=0,1 УЛЕ; uл=0,005 рад;
δopt=0,001; v7к пред=0,2304 рад/с; v8,1=0,0433 УЛЕ/с; v8,2=0,07 УЛЕ/с; v9,1=0,3 УЛЕ/с; v9,2= 0,4 УЛЕ/с; v10,1=0,1333 УЛЕ/с; v10,2=0,1333 УЛЕ/с; m1=13793 кг; m2=2306 кг; m3=2625 кг; m4=2125 кг; m5=mГР=1000 кг; x1,2= 1,3 УЛЕ; x2,2= –1,2 УЛЕ; y1,2= 1,725 УЛЕ; x3,31=5 УЛЕ; y3,32= 0,3 УЛЕ; x3,33= 9,7 УЛЕ; x4,41= 5 УЛЕ; y3,42=0,3 УЛЕ; y4,43=0,4 УЛЕ; x2,54=1,3
255
УЛЕ; cГ1=3,6 УЛЕ; cГ2=1,35 УЛЕ; q7=0,05 рад; q8=0,05 рад; q9= 0,5
УЛЕ; q10=0,5 УЛЕ; k7,1=0,16; k7,2=–0,0000002; k8,1=–2∙10–19; k8,2=2∙10–13; k8,3=10–07; k8,4=0,064; k9,1=0,4961; k9,2=–0,3639; k10,1=0,2022;
k10,2=–0,2215; ng=200.
Неуказанные исходные параметры, а также матрица препятствий [Yпр] в случае рассмотрения пространства с препятствиями принимали численные значения, идентичные заданным в разделе 3.11 и по
(3.154).
Все конструктивные и технологические параметры соответствовали ГПК марки «Урал КС 45721 Челябинец».
При оптимизации технологических параметров рабочего процесса ГПК на примере ГПК рассматривалась область положений начала
системы координат базового шасси xш0, zш0 (в УЛЕ) [xш0min; xш0max]×[zш0min; zш0max] = [–3; 14]×[–3; 14].
Было проведено 5 серий вычислительных экспериментов, в каждой из которых выполнялась оптимизация технологических параметров рабочего процесса по собственному критерию эффективности с соблюдением дополнительных специфических условий.
Результаты 1-й серии экспериментов. В первой серии в качестве критерия эффективности перемещения груза в пространстве конфигураций ГПК использовалось значение минимального времени перемещения T по (4.4); ограничения в виде рациональных максимальных технологических скоростей рабочего процесса вида (4.127), (4.133) и (4.138) не учитывались, препятствия в рабочей области отсутствовали
[YПР(i, k)=0 (i, k)].
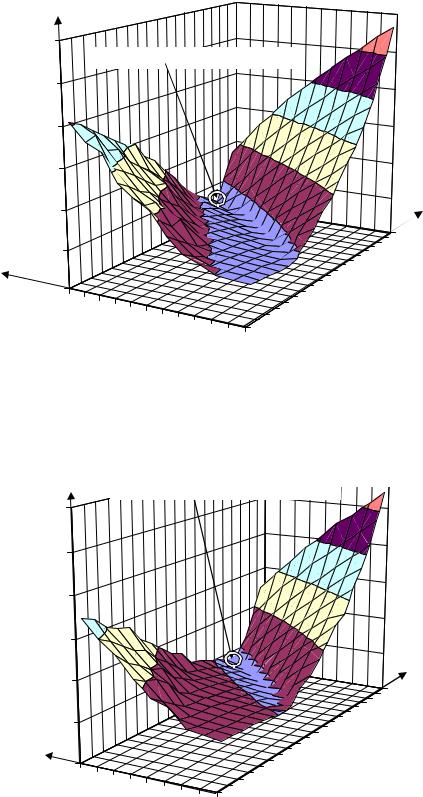
На рис. 4.35 и 4.36 в качестве примера приведены графики зависимостей временного критерия T от начального и конечного значений управляемых координат q8, q9, q10 при двух различных положениях базового шасси в пространстве: (q1= –1; q3= –3) и (q1= –3; q3= –3) УЛЕ.
Данные графики были получены путем многократного синтеза оптимальной по временному критерию T траектории для различных сочетаний значений управляемых координат в начальной (qn8, qn9, qn10) и конечной (qk8, qk9, qk10) точках положения груза, что обусловлено кинематической избыточностью механической системы ГПК.
Все последующие графики серии (рис. 4.37 – 4.43) строились из отдельных точек, соответствующих глобальным минимумам графиков вида 4.35 и 4.36, что иллюстрирует рис. 4.43, на котором показаны положения указанных точек № 1 и 2 (см. рис. 4.35 и 4.36 соответственно) со значениями критерия T=13,3 с и T=14,5 с соответственно.
256
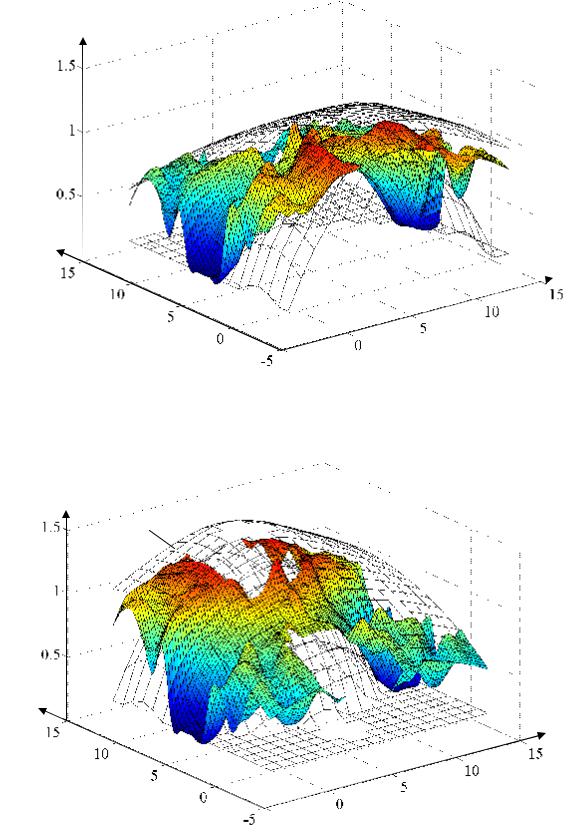
Анализ результатов первой серии экспериментов показал, что при отсутствии препятствий в рабочей области сохраняется симмет-
рия формы графиков диапазонных ([qn8В; qn8Н]; [qn9В; qn9Н]; [qn10В; qn10Н] [qk8В; qk8Н]; [qk9В; qk9Н]; [qk10В; qk10Н]) и оптимальных (qn8, qn9, qn10, qk8, qk9, qk10) значений управляемых координат q8, q9, q10, имеющих диапа-
зоны предельных значений вследствие кинематической избыточности механической системы ГПК в начальной и конечной заданных точках траектории относительно линии, соединяющей начальную и конеч-
ную точки (см. рис. 4.37 – 4.42).
Для графика временного критерия T симметрия наблюдается как относительно линии, соединяющей точки начального и конечного положений условного центра груза, так и относительно вертикальной плоскости между начальным и конечным положениями, равноудаленной от них (см. рис. 4.43).
На графиках оптимальных значений управляемых координат
(qn8, qn9, qn10, qk8, qk9, qk10, см. рис. 4.37 – 4.42) присутствует множество локальных минимумов и максимумов. При этом оптимальные
значения управляемых координат при некоторых положениях базового шасси совпадают с диапазонными значениями (верхним или нижним), в других случаях – находятся между диапазонными значениями.
Разрывы на графиках рис. 4.37 – 4.42 внутри рассматриваемой области положений базового шасси вызваны невозможностью обеспечить требуемые декартовы координаты груза в пространстве при помощи управляемых координат, на которые наложены конструктивные ограничения.
В первой серии экспериментов глобальный минимум в пределах рассматриваемой области положения базового шасси достигается, когда начало системы координат шасси располагается равноудаленно относительно начальной и конечной точек положения груза и в то же время максимально удалено от обеих указанных точек (q1=5; q3= –3 УЛЕ).
Для реализации траектории с минимальным временем перемещения необходимо, используя графики на рис. 4.37 – 4.42, выбрать для точки (q1=5; q3= –3 УЛЕ) глобального минимума целевой функции оптимальные значения управляемых координат с диапазонами, причем в начальной и конечной точках положения груза (qn8, qn9, qn10, qk8,
qk9, qk10).
257
120.00 |
|
Точка минимума №1, T=13,3 с |
|
|
|
|
|
||||||
T, с |
|
|
|
|
|
|
|||||||
100.00 |
|
|
|
|
|
|
|
|
|
|
|
|
|
80.00 |
|
|
|
|
|
|
|
|
|
|
|
|
|
60.00 |
|
|
|
|
|
|
|
|
|
|
|
|
|
40.00 |
|
|
|
|
|
|
|
|
|
|
qk8, qk9, qk10, рад |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20.00 |
|
|
|
|
|
|
|
|
|
|
0.98 |
7.00 |
14.54 |
qn10, qn9, qn8, рад |
|
|
|
|
|
|
|
|
|
0.73 |
2.83 |
|
|
|
|
|
|
|
|
|
|
0.49 |
8.93 |
|
|||
|
|
|
|
|
|
|
|
|
0.88 |
|
|
||
|
0.67 |
0.57 0.47 0.37 |
|
|
|
5.37 |
|
|
|||||
|
|
|
0.24 |
0.00 |
|
|
|
||||||
8.55 |
|
0.27 |
0.17 |
2.62 |
|
|
|
||||||
11.06 |
|
|
|
7.01 |
6.05 |
|
|
|
|
|
|
|
|
8.00 |
5.35 |
5.52 |
|
|
|
|
|
|
|||||
|
|
|
|
2.95 |
|
|
|
|
|
|
|
|
|
Рис. 4.35. Зависимость временного критерия эффективности T от начального и конечного значений управляемых координат q8, q9, q10 при постоянных координатах базового шасси (УЛЕ): q1=–1; q3=–3 (серия экспериментов № 1)
Точка минимума № 2, T=14,5 с
120.00 |
|
|
|
|
|
|
|
|
|
T, с |
|
|
|
|
|
|
|
|
|
100.00 |
|
|
|
|
|
|
|
|
|
80.00 |
|
|
|
|
|
|
|
|
|
60.00 |
|
|
|
|
|
|
|
|
|
40.00 |
|
|
|
|
|
|
|
qk8, qk9, qk10, рад |
|
|
|
|
|
|
|
|
|
|
|
20.00 |
|
|
|
|
|
|
|
0.90 6.14 13.09 |
|
qn10, qn9, qn8, рад |
|
|
|
|
|
0.42 |
0.66 2.73 |
8.15 |
|
|
|
|
|
|
|
1.09 |
|
||
0.57 0.47 |
|
|
|
4.78 |
|
||||
0.37 |
|
0.17 |
|
|
|
||||
0.27 0.17 |
0.38 2.06 |
|
|
||||||
8.92 |
|
|
|
|
|||||
8.93 |
|
7.82 |
|
|
|
|
|
|
|
5.95 |
3.247.21 |
|
|
|
|
|
|||
|
|
|
|
|
|
||||
Рис. 4.36. Зависимость временного критерия эффективности T от начального и конечного значений управляемых координат q8, q9, q10 при постоянных координатах базового шасси (УЛЕ): q1=–3; q3=–3 (серия экспериментов № 1)
258
qn8B, qn8Н, qn8, рад
qn8B
qn8
qn8Н
x1, УЛЕ
z1, УЛЕ
Рис. 4.37. Зависимость диапазонных qn8B, qn8Н и оптимального qn8 значений управляемой координаты q8 в начальной точке положения груза от положений базового шасси q1, q3 (серия экспериментов № 1)
qk8B, qk8Н, рад
qk8B
 qk8
qk8
 qk8Н
qk8Н
x1, УЛЕ
z1, УЛЕ
Рис. 4.38. Зависимость диапазонных qk8B, qk8Н и оптимального qk8 значений управляемой координаты q8 в конечной точке положения груза от положений базового шасси q1, q3 (серия экспериментов № 1)
259