Материал: 2426
qn8B, qn8Н, qn8, рад
qn8B
qn8
x1, УЛЕ |
z1, УЛЕ |
||
|
|
|
|
qn8Н
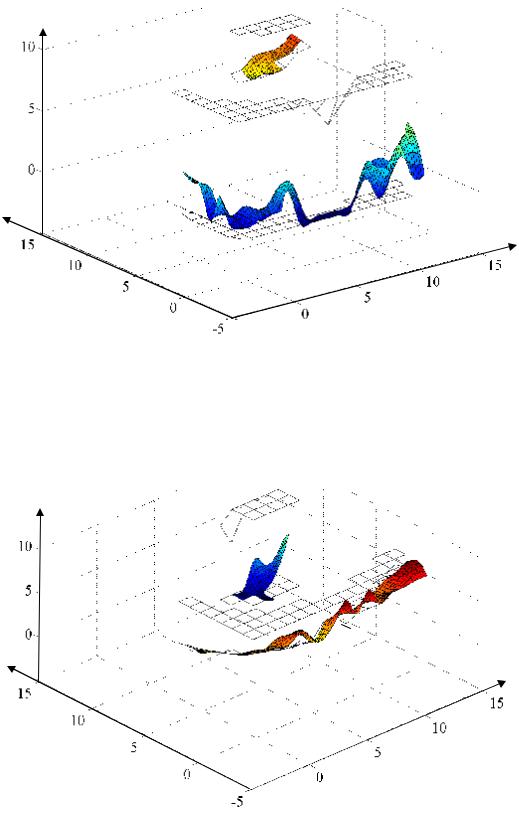
Рис. 4.56. Зависимость диапазонных qn8B, qn8Н и оптимального qn8 значений управляемой координаты q8 в начальной точке положения груза от положений базового шасси q1, q3 (серия экспериментов № 3)
qk8B, qk8Н, qk8, рад
|
qk8B |
|
x1, УЛЕ |
qk8 |
|
qk8Н |
||
|
z1, УЛЕ
Рис. 4.57. Зависимость диапазонных qk8B, qk8Н и оптимального qk8 значений управляемой координаты q8 в конечной точке положения груза от положений базового шасси q1, q3 (серия экспериментов № 3)
270
qn9B, qn9Н, qn9, УЛЕ
qn9B
qn9
qn9Н
x1, УЛЕ
z1, УЛЕ
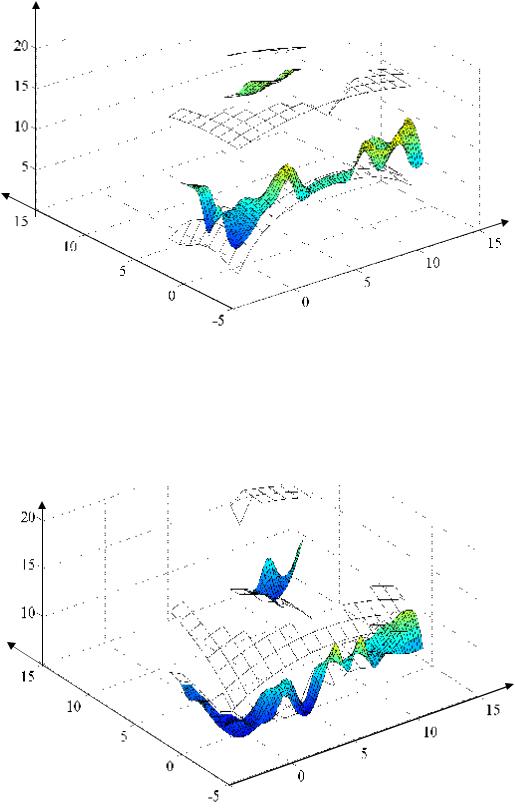
Рис. 4.58. Зависимость диапазонных qn9B, qn9Н и оптимального qn9 значений управляемой координаты q9 в начальной точке положения груза от положений базового шасси q1, q3 (серия экспериментов № 3)
qk9B, qk9Н, qk9, УЛЕ
qk9B
qk9
qk9Н
x1, УЛЕ
z1, УЛЕ
Рис. 4.59. Зависимость диапазонных qk9B, qk9Н и оптимального qk9 значений управляемой координаты q9 в конечной точке положения груза от положений базового шасси q1, q3 (серия экспериментов № 3)
271
qn10B, qn10Н, qn10, УЛЕ
qn10B
qn10
x1, УЛЕ
z1, УЛЕ
qn10Н
Рис. 4.60. Зависимость диапазонных qn10B, qn10Н и оптимального qn10 значений управляемой координаты q10 в начальной точке положения груза от положений базового шасси q1, q3 (серия экспериментов № 3)
qk10B, qk10Н, qk10, УЛЕ
qk10B
x1, УЛЕ |
qk10 |
|
z1, УЛЕ
qk10Н
Рис. 4.61. Зависимость диапазонных qk10B, qk10Н и оптимального qk10 значений управляемой координаты q10 в конечной точке положения груза от положений базового шасси q1, q3 (серия экспериментов № 3)
272
T, c
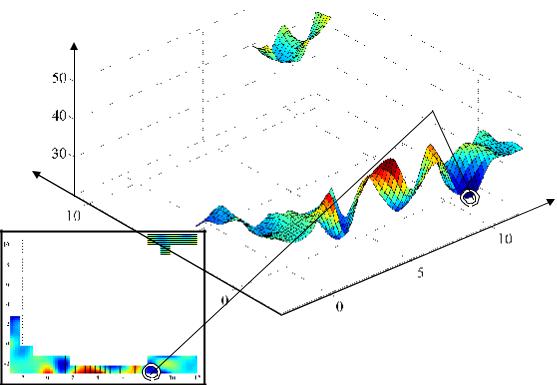
Точка условного глобального минимума на рассматриваемой области, T= 30 с
x1, УЛЕ
z1, УЛЕ
x1, УЛЕ
z1, УЛЕ
Рис. 4.62. Зависимость временного критерия эффективности T от положений базового шасси q1, q3 при наличии препятствий и ограничении на предельную линейную скорость груза (серия экспериментов № 3)
Наличие препятствий значительно уменьшает область возможного расположения базового шасси в пределах рассматриваемой области (рис. 4.56–4.62). Значение целевой функции (временного критерия, или времени реализации) для оптимальной траектории составляет T=30 с, что примерно в 2 раза больше времени реализации оптимальной траектории в серии экспериментов № 2 и обусловлено необходимостью обхода препятствий.
Результаты 4-й серии экспериментов. В данной серии экспери-
ментов в качестве критерия эффективности использовалось значение абсолютных затрат топлива Ae (энергетический/стоимостный критерий), учитывались ограничения по максимальным рациональным скоростям изменения управляемых координат ГПК вида (4.127), (4.133) и (4.138), в рабочей области отсутствовали препятствия [YПР(i,k)=0
(i,k)].
На рис. 4.63 и 4.64 в качестве примера приведены графики зависимостей энергетического критерия Ae от начального и конечного значений управляемых координат q8, q9, q10 при двух различных по-
273
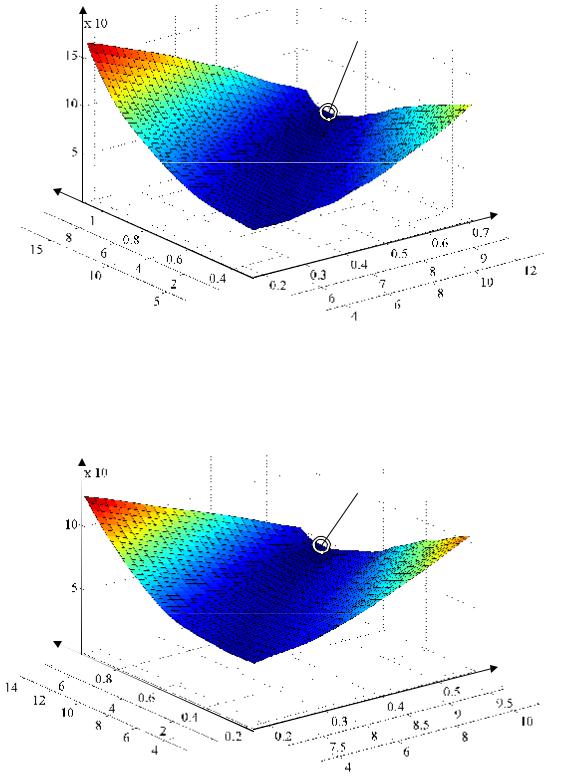
ложениях базового шасси в пространстве: q1= –1; q3= –3 и q1= –3; q3= –3 УЛЕ.
Ae, л |
–3 |
Точка минимума № 1, Ae=4,5514·10–3 л |
q10н, q9н, q8н, рад
q8к, q9к, q10к, рад
Рис. 4.63. Зависимость энергетического критерия эффективности Ae от начального и конечного значений управляемых координат q8, q9, q10 при q1= –1; q3= –3 УЛЕ (серия экспериментов № 4)
–3
Ae, л
Точка минимума № 2, Ae=4,8502·10–3 л
q10н, q9н, q8н, рад
q8к, q9к, q10к, рад
Рис. 4.64. Зависимость энергетического критерия эффективности Ae от начального и конечного значений управляемых координат q8, q9, q10 при q1= –3; q3= –3 УЛЕ (серия экспериментов № 4)
274