Материал: 2426
При изменении координаты q9.
Выражение для вычисления элементарного времени перемещения dT9 при элементарном изменении обобщенной координаты q9 будет иметь вид
dT9=dq9/v9, |
(4.130) |
где v9 – максимально возможная конструктивная рабочая скорость движения штока гидроцилиндра выдвижения телескопического звена стрелы,
v |
ìv |
|
при |
(q |
|
- q |
)£ 0; |
(4.131) |
= í |
9,1 |
|
|
9нач |
9кон |
|
||
9 |
îv9,2 |
при |
(q9нач - q9кон ) > 0, |
|
||||
здесь v9,1, v9,2 – максимально возможные конструктивные рабочие скорости движения штока гидроцилиндра телескопического звена двухсекционной стрелы при выдвижении и втягивании соответственно.
Для трехсекционной стрелы соответствующие зависимости будут иметь следующий вид:
ìv9 |
= v9,1 |
при |
[(q9нач - q9кон ) < 0]Ù[q9 < q9гран ]; |
|
||||||||||
ïv |
= v |
при |
[(q |
нач |
- q |
кон |
) > 0]Ù[q |
< q |
9 |
гран |
]; |
|
||
ï |
9 |
9,2 |
|
[(q |
9 |
9 |
9 |
|
|
(4.132) |
||||
ív |
= v |
при |
9нач |
- q |
кон |
) < 0]Ù[q |
> q |
9 |
гран |
]; |
||||
ï |
9 |
9,3 |
|
|
9 |
9 |
|
|
|
|||||
ï |
|
= v9,4 |
при |
[(q9 |
нач - q9 |
кон ) > 0]Ù[q9 |
> q9 |
гран ], |
|
|||||
îv9 |
|
|||||||||||||
где v9,1, v9,2 – максимальные рабочие скорости движения штока гидроцилиндра нижней секции телескопического звена стрелы при выдвижении и втягивании соответственно; v9,3, v9,4 – максимальные рабочие скорости движения штока гидроцилиндра верхней секции телескопического звена стрелы при выдвижении и втягивании соответственно; q9гран – длина телескопической стрелы, соответствующая полному выдвижению нижней секции телескопического звена при нулевом выдвижении верхней секции телескопического звена; – знак логического умножения (конъюнкции).
В то же время, согласно результатам проведенных натурных экспериментов, условие ограничения на максимальную мгновенную скорость перемещения груза при элементарном изменении координаты q9 может быть аппроксимировано экспоненциальной зависимостью от массы груза вида
|
dq9 |
|
dT9 = |
(k9,1 ×ek9,2×mГР ), |
(4.133) |
220 |
|
|
где k9,1, k9,2 – эмпирические коэффициенты.
Результирующее выражение для вычисления элементарного времени перемещения dT9 при элементарном изменении обобщенной координаты q9, учитывающее как конструктивные, так и рациональные ограничения, будет иметь следующий вид:
|
ì |
|
|
dq9 |
|
|
|
|
ü |
|
|
dT |
ï |
|
|
; dq |
|
/v |
|
ï |
|
||
= maxí |
|
|
|
|
|
|
ý . |
(4.134) |
|||
(k |
|
×ek9,2 ×mГР ) |
9 |
9 |
|||||||
9 |
ï |
|
|
|
ï |
|
|||||
|
î |
|
9,1 |
|
|
|
|
|
|
þ |
|
Интегрирование позволяет определить минимально возможное время перемещения для некоторого конечного изменения координаты q9:
T9 = q9 |
конò f [(q8 , q9 , mГР )]dq9 , |
(4.135) |
q9 |
нач |
|
где f[dT9(q8, q9, mГР)] – интегрируемая функция вида (4.134); q9нач и q9кон – соответственно начальное и конечное интервальные значения координаты q9. При изменении q9 от q9нач до q9кон определяется искомое время перемещения T9.
В интервале элементарного приращения обобщенной координаты dq9 величина v9 может рассматриваться как константа, что позволяет использовать численный способ интегрирования с постоянным шагом
(рис. 4.26).
При изменении координаты q10.
Выражение для вычисления элементарного времени перемещения dT10 при элементарном изменении обобщенной координаты q10 будет иметь вид
dT10=dq10/v10, |
(4.136) |
где v10 – максимально возможная конструктивная рабочая скорость подъема/опускания груза,
ìv10 |
= v10,1 |
при [(q10нач - q10кон )< 0]Ù[mГР < mГРгран]; |
|
|||||||
ïv |
= v |
при [(q |
- q |
)> 0]Ù[m |
ГР |
< m |
ГРгран |
]; |
|
|
ï |
10 |
10,2 |
10нач |
10кон |
)< 0]Ù[m |
|
|
(4.137) |
||
ív |
= v |
при [(q |
- q |
ГР |
> m |
ГРгран |
]; |
|||
ï |
10 |
10,3 |
10нач |
10кон |
|
|
|
|
||
ï |
|
= v10,4 |
при [(q10нач - q10кон )> 0]Ù[mГР > mГРгран], |
|
||||||
îv10 |
|
|||||||||
здесь mГР – масса поднимаемого груза; mГРгран – некоторое граничное значение массы поднимаемого груза, при превышении которого сту-
221
пенчато снижается максимальная конструктивная допустимая скорость подъема/опускания груза; v10,1, v10,2 – максимальные конструктивные рабочие скорости подъема и опускания груза при массе груза
(mГР < mГРгран) соответственно (ускоренный подъем); v10,3, v10,4 – максимальные конструктивные рабочие скорости подъема и опускания
груза при массе груза (mГР > mГРгран) соответственно.
В то же время, согласно результатам проведенных натурных экспериментов, условие ограничения на максимальную мгновенную скорость перемещения груза при элементарном изменении координаты q10 может быть аппроксимировано степенной зависимостью от массы груза вида
dT10 = (k |
dq10 |
), |
(4.138) |
|
×m |
k10,2 |
|||
10,1 |
|
ГР |
|
|
где k10,1, k10,2 – эмпирические коэффициенты.
Результирующее выражение для вычисления элементарного времени перемещения dT10 при элементарном изменении обобщенной координаты q10, учитывающее как конструктивные, так и рациональные ограничения, будет иметь следующий вид:
|
ì |
|
dq10 |
|
|
ü |
|
|
dT10 |
ï |
(k |
) |
; dq10 /v10 |
ï |
(4.139) |
||
= maxí |
×m |
k10,2 |
ý. |
|||||
|
ï |
|
ï |
|
||||
|
î |
10,1 |
|
ГР |
|
|
þ |
|
Интегрирование позволяет определить минимально возможное время перемещения для некоторого конечного изменения координаты
q10:
T10 = |
q10кон |
(mГР )dq10 |
|
|
ò f |
, |
(4.140) |
q10нач
где f[dT10(mГР)] – интегрируемая функция вида (4.139); q10нач и q10кон – соответственно начальное и конечное интервальные значения коор-
динаты q10. При изменении q10 от q10нач до q10кон определяется искомое время перемещения T10.
В интервале элементарного приращения обобщенной координаты dq10 величина v10 может рассматриваться как константа, что позволяет использовать численный способ интегрирования с постоянным шагом
(рис. 4.26).
Для численной реализации разработанной методики при композиции перемещений сразу по нескольким управляемым координатам
222
целесообразна дискретная параметрическая форма представления всех управляемых координат:
q7=q7нач+t·dq7; q8=q8нач+t·dq8; q9=q9нач+t·dq9; q10=q10нач+t·dq10, (4.141)
где t=1,2,…,n – параметр; n – число частей разбиения интервала по каждой управляемой координате; dq7, dq8, dq9, dq10 – действительные текущие значения шагов дискретизации по управляемым координатам.
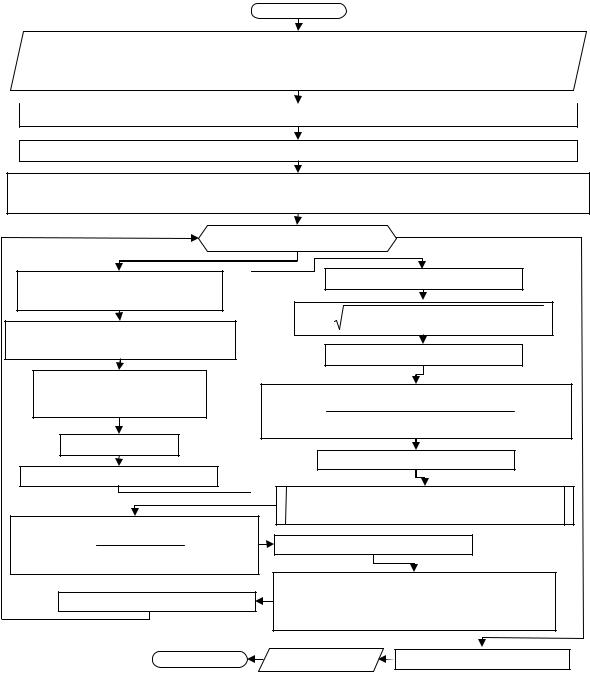
Пуск |
1 |
2 |
|
|
Ввод исходных данных: x3,33; y4,43; x2,54; α0; cГ1; cГ2; v7к пред; v8,1; v8,2; v9,1; v9,2; v9,3; v9,4; q9гран; mГР; mГРгран; v10,1; v10,2; v10,3; v10,4; k7,1, k7,2, k8,1, k8,2, k8,3, k8,4, k9,1, k9,2,
k10,1, k10,2, q7нач; q7кон; q8нач; q8кон; q9нач; q9кон; q10нач; q10кон; q7; q8; q9; |
q10 |
|
3 |
n=(|q7кон–q7нач|)/ q7+(|q8кон–q8нач|)/ q8+(|q9кон–q9нач|)/ q9+(|q10кон–q10нач|)/ |
q10 |
4
dq7=(q7кон–q7нач)/n; dq8=(q8кон–q8нач)/n; dq9=(q9кон–q9нач)/n; dq10=(q10кон–q10нач)/n |
5 |
|
T7=0;T8=0;T9=0;T10=0; определение v8 по (4.126)
Определение (lГ)0 по (4.124) и значению q8нач
|
|
|
|
|
|
|
|
|
t=1:n |
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
|
|
||
q8=q8нач+t·dq8; q9=q9нач+t·dq9; 7 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
α1=q8+α0 |
|
|
13 |
|
|||||||||||||
|
|
q10=q10нач+t·dq10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
8 |
|
lГ = |
cГ12 + cГ 2 |
2 - 2 × cГ1 × cГ 2 × cosα1 |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||
Определение x2,5 по (4.118) и MФ |
|
|
|
|
|
|
|
|
|
|
|
14 |
|
||||||||
|
|
по (4.119) |
|
|
|
|
|
dlГ=(lГ)t–(lГ)t–1; (lГ)t–1=(lГ)t |
|
||||||||||||
|
|
|
|
|
|
|
|
9 |
|
|
15 |
||||||||||
|
v7 |
ì(k7,1 |
+ k7,2 |
× MФ )ü |
|
ì |
|
|
|
|
|
|
|
|
|
||||||
|
= miní |
|
v7к пред |
ý |
|
|
|
|
|
|
dq8 |
|
|
|
|
|
ü |
||||
|
|
î |
|
þ |
|
dT8 |
ï |
|
|
|
|
|
|
|
; |
|
ï |
||||
|
|
|
|
|
|
=maxí |
|
|
|
|
|
|
|
|
dl /v8ý |
||||||
|
|
|
|
|
|
|
|
|
|
ï(k ×M 3 +k ×M 2 +k ×M +k ) |
Г |
ï |
|||||||||
|
|
dT7=dq7/v7 |
|
10 |
|
|
î |
8,1 |
Ф |
8,2 |
|
Ф |
8,3 |
Ф |
8,4 |
|
þ |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
16 |
|
|||||
|
|
|
|
11 |
|
|
|
T8=T8+dT8 |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
T7=T7+dT7 |
|
|
|
|
|
|
|
|
17 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
18 |
|
|
|
|
|
|
|
|
|
Определение v9 по (4.131) или (4.132) |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
и v10 по (4.137) (рис. 4.27) |
|
|
|||||||||
|
|
ì |
|
|
dq9 |
|
|
|
ü |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
19 |
|
|
|
|||
dT9 |
|
ï |
(k |
|
|
; |
dq9 /v9 |
ï |
|
T9=T9+dT9 |
|
|
|
|
|
|
|||||
= maxí |
|
|
|
ý |
|
|
|
|
|
|
|
|
|||||||||
|
|
ï |
9,1 |
× ek9,2×mГР ) |
|
ï |
|
|
|
|
|
|
|
|
|
|
20 |
|
|||
|
|
î |
|
|
|
|
|
þ |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
21 |
|
ì |
|
dq10 |
|
|
|
|
ü |
|
|||
|
|
|
|
T10=T10+dT10 |
|
|
|
ï |
(k |
) |
; |
|
dq10 |
ï |
|
||||||
|
|
|
|
|
dT10 = maxí |
× m |
k10,2 |
|
/v10 ý |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
ï |
|
|
|
ï |
|
|||||
|
|
|
|
|
|
|
|
24 |
|
|
î |
10,1 |
|
|
ГР |
|
|
|
|
þ |
|
|
|
|
|
|
|
|
|
|
Вывод T |
23 |
|
|
22 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
Останов |
|
|
|
|
T=T7+T8+T9+T10 |
|
||||||||
Рис. 4.26. Блок-схема обобщенного алгоритма определения временной функции стоимости изменения управляемых обобщенных координат
223
|
|
|
|
|
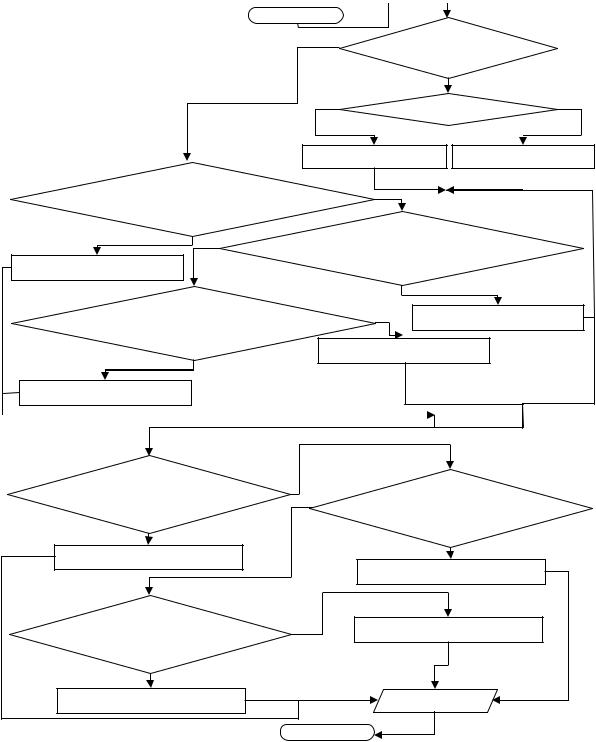
Пуск |
1 |
|
2 |
|
|
|
|
|
|
Нет |
|
Стрела |
|
|
|
|
|
|
|
|
|
двухсекционная? |
|
|
|
|
|
|
|
Нет |
|
Да |
3 |
Да |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
(q9нач–q9кон)≤0 |
|
|
|
|
|
|
|
|
|
4 |
5 |
|
|
|
|
6 |
|
|
v9=v9,2 |
v9=v9,1 |
|
|
|
|
[(q9нач − q9кон ) < 0] |
|
Нет |
|
|
|||
|
|
[q9 < q9гран ] |
|
[(q9нач − q9кон ) > 0] |
7 |
|
|||
8 |
|
Да |
Нет |
|
|
|
|||
v9= v9,1 |
|
|
|
|
|
[q9 < q9гран ] |
|
|
|
|
|
|
|
|
9 |
|
Да |
|
10 |
|
|
[(q9нач − q9кон ) < |
0] |
|
Нет |
|
|||
|
|
|
v9=v9,2 |
|
|||||
|
|
|
|
|
|||||
|
|
[q9 > q9гран |
] |
|
|
v9=v9,4 |
27 |
|
|
11 |
Да |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
v9=v9,3 |
|
|
|
|
|
|
|
||
|
|
|
12 |
Нет |
|
|
|
|
|
[(q10 нач |
− q10 кон ) < |
0] |
|
|
|
|
13 |
||
|
Нет |
|
[(q10нач − q10кон )> 0] |
||||||
[m ГР < m ГРгран |
] |
|
|
|
|||||
|
|
|
[mГР < mГРгран ] |
|
|||||
|
|
Да |
|
14 |
|
|
|
||
|
|
|
|
|
Да |
|
|
||
|
|
v10=v10,1 |
|
|
|
|
|
15 |
|
|
|
|
|
|
|
v10=v10,2 |
|||
|
|
|
|
|
|
|
|
||
[(q10 нач |
− q10 кон ) < 0] |
16 |
Нет |
|
v10=v10,4 |
17 |
|
||
|
|
|
|
||||||
|
[m ГР > m ГРгран |
] |
|
|
|
|
|
|
|
|
|
Да |
18 |
|
|
|
19 |
|
|
|
|
v10=v10,3 |
|
|
|
|
Вывод v9, v10 |
|
|
|
|
|
|
|
Останов |
20 |
|
|
|
Рис. 4.27. Блок-схема алгоритма определения максимальных конструктивных |
|||||||||
|
|
|
скоростей v9 и v10 |
|
|
||||
Значение n предлагается определять по методу «Манхэттен» [74]:
n=(|q7кон–q7нач|)/ q7+(|q8кон–q8нач|)/ q8+ |
|
+(|q9кон–q9нач|)/ q9+(|q10кон–q10нач|)/ q10, |
(4.142) |
224 |
|