Материал: 2426
4.6.Методика определения временной функции стоимости изменения управляемых обобщенных координат грузоподъемного крана
Вкачестве функции стоимости перемещений груза ГПК из некоторого начального положения в некоторое конечное используется
интегральное полное время перемещения T.
Принято в качестве допущения, что разгон и торможение звеньев в начале и в конце перемещения незначительно влияют на полное время перемещения T, и их влиянием можно пренебречь при рассмотрении достаточно больших перемещений звеньев ГПК. Максимальные скоро-
сти приводов управляемых координат q7, q8, q9, q10 при определении минимального времени перемещений выступают как функции от всех управляемых координат. Принятое допущение позволяет рассматривать T как функцию перемещений звеньев ГПК, т.е. изменения обобщенных координат, и использовать методы поиска оптимальной (по T) траектории на графах, методику дискретной локальной оптимизации.
Переменные ограничения на максимальные скорости управляе-
мых координат q7, q8, q9, q10 приняты по условиям соблюдения конструктивных ограничений на скорости изменения указанных координат
ирациональных, задаваемых человеком-оператором ГПК, исходя из условий безопасной работы ограничений, полученных по результатам натурных экспериментов.
Максимальная скорость изменения трех (q8, q9, q10) из четырех управляемых координат ГПК q7, q8, q9, q10 в общем случае может зависеть как от значения координат q8 и q9, так от направления изменения рассматриваемой координаты (знака приращения). Кроме того,
максимальные скорости изменения всех управляемых координат q7, q8, q9, q10 будут зависеть от массы перемещаемого груза mГР.
Для большинства современных стреловых кранов используются два значения скорости подъема/опускания груза грузовым канатом: номинальная и увеличенная с грузом не более определенной массы
mГРгран, составляющей некоторую долю от максимальной грузоподъ-
емности [129, 170].
Вкачестве еще одного допущения принято соблюдение принципа суперпозиции при совмещении изменения нескольких управляемых ко-
ординат: интегральное время изменения Ti отдельной координаты qi, i [7;10] от некоторого начального значения qi нач до конечного значе-
ния qi кон не зависит от наличия или отсутствия перемещений по другим управляемым координатам в рассматриваемый период времени.
215
Тогда интегральное полное время перемещения T звеньев ГПК из начального положения sнач с координатами
sнач=[q7нач; q8нач; q9нач; q10нач] |
(4.115) |
в конечное положение sкон с координатами |
|
sкон=[q7кон; q8кон; q9кон; q10кон] |
(4.116) |
определится как максимальный элемент множества: |
|
T = max {T7; T8; T9; T10}, |
(4.117) |
где T7, T8, T9, T10 – интегральное время изменения координат q7, q8, q9, q10 соответственно при перемещении из точки с координатами (4.115) в точку с координатами (4.116) с максимально допустимыми скоростями.
q9 X3, X4
y4,43
Y4 m4 
y3,42
x3,33
Y3
m3
Y2 |
m5=mГР |
m2 |
|
 q8
q8
X2
x2,54 |
x2,5 |
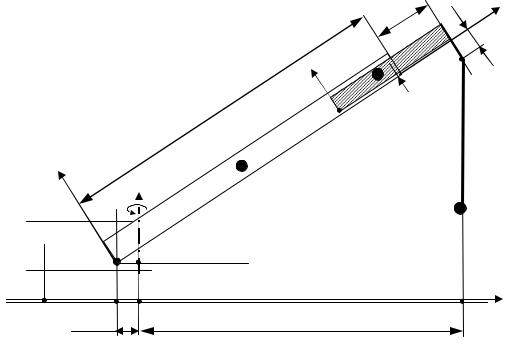
Рис. 4.24. Расчетная схема для определения элементарного времени перемещения dT7 при изменении обобщенной координаты q7
Выражения для вычисления значений T7, T8, T9, T10 будут иметь следующий вид.
При изменении координаты q7.
Принято допущение: при изменении управляемой координаты q7 значения обобщенных координат q8 и q9 также могут изменяться по
216
неявной зависимости. Равным образом данное допущение относится и ко всем остальным управляемым координатам.
Согласно схеме, изображенной на рис. 4.24, определяется вылет стрелы – расстояние x2,5 от точки проекции центра масс груза (m5=mГР) на горизонтальную плоскость до точки проекции оси поворота поворотной колонки:
x2,5=(q9+ x3,33)·cos(q8)+ y4,43·sin(q8) – x2,54, |
(4.118) |
где x3,31, x2,54, y4,43 – постоянные конструктивные размеры. |
|
Тогда значение грузового момента MФ будет равно |
|
MФ= mГР∙x2,5. |
(4.119) |
Выражение для вычисления элементарного времени перемещения dT7 при элементарном изменении обобщенной координаты q7 имеет вид
dT7=dq7/v7, |
(4.120) |
где v7 – максимально возможная, исходя из заданных как конструктивных, так и рациональных ограничений, текущая рабочая скорость изменения обобщенной координаты поворота поворотной колонки q7,
v7 |
ì(k7,1 |
+ k7,2 × MФ )ü |
, |
(4.121) |
|
= miní |
v7к пред |
ý |
|||
|
î |
þ |
|
|
|
здесь k7,1, k7,2 – эмпирические коэффициенты, определяющие рациональные ограничения скоростей согласно данным натурных экспериментов; v7к пред – максимальная конструктивно возможная угловая скорость изменения обобщенной координаты q7 (постоянная характеристика ГПК определенной конструкции).
Интегрирование позволяет определить минимально возможное время перемещения для некоторого конечного изменения координаты q7:
T7 = q7 |
òконf [dT7 (q8 , q9 , mГР )]dq7 , |
(4.122) |
q7 |
нач |
|
где f[dT7(q8, q9, mГР)] – интегрируемая функция вида (4.120); q7нач и q7кон – соответственно начальное и конечное интервальные значения координаты q7. При изменении q7 от q7нач до q7кон определяется искомое время перемещения T7.
217

здесь v8,1, v8,2 – максимальные рабочие скорости движения штока гидроцилиндра подъема стрелы при выдвижении и втягивании соответственно (постоянные характеристики гидропривода ГПК определенной конструкции).
В то же время, согласно результатам проведенных натурных экспериментов, условие ограничения на максимальную мгновенную скорость перемещения груза при элементарном изменении координаты q8 может быть аппроксимировано полиномиальной зависимостью вида
dT8 = (k8,1 × MФ |
dq8 |
|
|
3 + k8,2 × MФ |
2 + k8,3 × MФ + k8,4 ), |
(4.127) |
|
где k8,1, k8,2, k8,3, k8,4 – эмпирические коэффициенты.
Представленная зависимость отражает границы зоны рациональных максимальных технологических скоростей рабочего процесса, которые устанавливает человек-оператор.
Результирующее выражение для вычисления элементарного времени перемещения dT8 при элементарном изменении обобщенной координаты q8, учитывающее как конструктивные, так и рациональные ограничения, будет иметь следующий вид:
|
ì |
|
|
|
|
|
|
dq8 |
|
|
|
|
|
|
|
|
|
|
ü |
|
|
dT8 |
ï |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; dlГ |
/v8 |
ï |
|
||
= maxí |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ý |
. (4.128) |
|||
(k |
|
× M |
|
3 + k |
|
× M |
2 |
+ k |
|
× M |
|
+ k |
|
) |
|||||||
|
ï |
8,1 |
Ф |
8,2 |
8,3 |
Ф |
8,4 |
|
|
ï |
|
||||||||||
|
î |
|
|
|
|
Ф |
|
|
|
|
|
|
|
þ |
|
||||||
Интегрирование позволяет определить минимально возможное время перемещения для некоторого конечного изменения координаты q8:
T8 = q8 |
конò f [(q8 , q9 , mГР )]dq8 , |
(4.129) |
q8 |
нач |
|
где f[dT8(q8, q9, mГР)] – интегрируемая функция вида (4.128); q8нач и q8кон – соответственно начальное и конечное интервальные значения координаты q8. При изменении q8 от q8нач до q8кон определяется искомое время перемещения T8.
В интервале элементарного приращения обобщенной координаты dq8 величина v8 может рассматриваться как константа, что позволяет использовать численный способ интегрирования с постоянным шагом
(рис. 4.26).
219