Материал: 2426
Матрица T1* будет иметь вид
|
é –cos(q6 +q6 )×cos(q5 +q5 ) |
|
sin(q5 +q5 ) |
|
-sin(q6 +q6 )×cos(q5 +q5 ) |
|
0 |
ù |
|
||||||||||
|
|
|
|
|
|||||||||||||||
|
ê |
sin(q +q |
)×sin(q +q )- |
|
cos(q5 +q5 )´ |
cos(q +q )×sin(q +q )+ |
|
|
ú |
|
|||||||||
|
ê |
6 |
6 |
4 |
4 |
|
6 |
6 |
4 |
4 |
|
|
ú |
|
|||||
* |
|
+q6 )×cos(q4 + q4 )´ |
|
+sin(q6 |
+ q6 )×cos(q4 +q4 )´ |
|
|
|
|||||||||||
ê-cos(q6 |
|
´ |
( |
+ |
|
) |
|
(q2 +q2 )ú |
. (4.105) |
||||||||||
T1 =ê´sin(q + q ) |
|
|
|
cosq4 |
|
q4 |
|
´sin(q +q ) |
|
|
|
|
ú |
||||||
|
ê |
5 |
|
5 |
|
|
|
|
|
|
|
5 |
5 |
|
|
|
|
ú |
|
|
sin(q + q )×cos(q |
+q )+ |
|
-cos(q5 +q5 )´ |
cos(q +q )×cos(q |
+ q )- |
|
|
|
||||||||||
|
ê |
6 |
6 |
4 |
4 |
|
6 |
6 |
4 |
4 |
|
|
ú |
|
|||||
|
ê |
+cos(q6 +q6 )×sin(q4 +q4 )´ |
|
´sin(q4 +q4 ) |
|
-sin(q6 +q6 )×sin(q4 +q4 )´ |
|
0 |
ú |
|
|||||||||
|
ê |
|
+q5 ) |
|
|
|
´sin(q5 |
+ q5 ) |
|
|
|
|
ú |
|
|||||
|
ê´sin(q5 |
|
|
|
|
|
|
|
|
|
|
|
ú |
|
|||||
|
ê |
|
|
0 |
|
|
|
0 |
|
|
|
|
|
0 |
|
|
1 |
ú |
|
|
ë |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
û |
|
Нормальные реакции R1, R2, R3, R4 на опорных элементах определялись по зависимостям:
R1=co∙δy1o,0; R2=co∙δy2o,0; R3=co∙δy3o,0; R4=co∙δy4o,0, |
(4.106) |
где co – приведенный коэффициент жесткости опоры.
Текущее значение критерия устойчивости ξ, вычисленное на основе нормальных реакций, сравнивается с предельным критическим
значением критерия ξкрит. При снижении ξ ниже значения ξкрит переменная потери устойчивости Opr принимается равной 1, что соответ-
ствует недопустимому состоянию системы. В противном случае Opr принимается равной 0, что соответствует устойчивому состоянию системы.
Блок-схема алгоритма проверки положения ГПК в пространстве конфигураций по ограничению на устойчивость приведена на рис. 4.22.
Варьирование значения ξкрит позволяет учесть условия работы ГПК, динамические составляющие, снижающие устойчивость.
Алгоритм проверки положения ГПК в пространстве конфигураций по ограничению на устойчивость универсален, характеризуется высоким быстродействием и малой вычислительной сложностью.
4.5.Методика дискретной локальной оптимизации заданной траектории в среде с препятствиями по критериям
эффективности в пространстве конфигураций
Локальная оптимизация отдельной заданной в пространстве конфигураций ГПК траектории S может быть выполнена при соблюдении условия непересечения груза с эквидистантной (полидистантной) по-
210
верхностью [YЭ] вокруг препятствий [94, 102]. Если имеется некоторая траектория, в общем случае не являющаяся оптимальной, локальная оптимизация позволяет сравнительно быстро достичь положения ближайшего локального оптимума по целевой функции L (T, Ae или C) путем последовательного изменения положения точек траектории sp, p [1; sm]. Поскольку траектория и полидистантная поверхность [YЭ] заданы дискретно на равномерной сетке, предлагается следующий алгоритм дискретной локальной оптимизации отдельной траектории, заданной в пространстве конфигураций ГПК.
Последовательно для каждой из точек траектории sp с координатами
sp=(q7p, q8p, q9p, q10p), |
(4.107) |
где p [1; sm], осуществляется дискретная оптимизация точек из интервала p [2; (sm–1)], т.е. точка sp перемещается в новое положение, минимизирующее целевую функцию L (T, Ae или C). Поскольку значение целевой функции L по (4.4), (4.5) или (4.6) определяется дискретно в виде суммы, при изменении положения одной точки будут меняться значения только двух слагаемых этой суммы, поэтому вместо значения L (T, Ae, C) при оптимизации может быть использовано значение Lp (Tp, Aep, Cp), вычисление которого занимает в (sm/2) меньше времени по сравнению с L (T, Ae, C):
Tp=T(p, p–1)+T(p, p+1); Aep=Ae(p, p–1)+Ae(p, p+1) ;
Cp=C(p, p–1)+C(p, p+1). (4.108)
Для дискретной оптимизации положения отдельной точки траектории в пространстве с препятствиями гарантировать результат способен метод полного перебора на ограниченной области-гиперкубе с центром в исходном положении точки sp.
Описание методики локальной оптимизации для отдельной точки траектории в пространстве конфигураций приведено в пп. 1–7.
1. Используя вложенные циклы по i, j, k, l, определяющие значения координат q7, q8, q9, q10 соответственно, для оптимизируемой точки sp с фиксированным p рассматриваются всевозможные сочетания координат груза q7, q8, q9, q10 на дискретной равномерной сетке для ограниченной области-гиперкуба с центром в исходном положении точки sp. Для этого варьируются индексы i, j, k, l в следующих диапа-
зонах (область гиперкуба): |
|
i [(ip–dip); (ip+dip)]; j [(jp–djp); (jp+djp)]; |
|
k [(kp–dkp); (kp+dkp)]; l [(lp–dlp); (lp+dlp)], |
(4.109) |
211 |
|
где ip, jp, kp, lp – индексы, соответствующие координатам q7p, q8p, q9p,
q10p точки sp до оптимизации; dip, djp, dkp, dlp – заданные положительные целочисленные значения приращений индексов i, j, k, l соответст-
венно.
Соответствующие индексам i, j, k, l текущие значения координат q7, q8, q9, q10 определятся по соотношениям:
q7=q7p+i∙Δuл; q8=q8p+j∙Δuл; q9=q9p+k∙Δlл; q10= q10p+l∙Δlл. |
(4.110) |
2. Текущие значения координат q8, q9, q10, варьируемые по (4.110), проверяются на выполнение условия невыхода за границы диапазонов предельных конструктивных значений q8 [q8min; q8max];
q9 [q9min; q9max]; q10 [q10min; q10max] соответственно. В случае выхода за границы диапазонов любой управляемой координаты текущее соче-
тание координат q7, q8, q9, q10 не рассматривается (переменная break=1).
3.Для каждого сочетания текущих значений координат q7, q8, q9, q10 в области гиперкуба выполняется проверка на пересечение подвижных звеньев ГПК и груза с полидистантной поверхностью препятствий по методике, изложенной в разделе 4.8.
В случае пересечения с препятствиями текущее сочетание координат q7, q8, q9, q10 не рассматривается (переменная break=1).
4.В случае выполнения условия равенства переменной break нулю (break=0), что соответствует рассмотрению текущего сочетания
координат q7, q8, q9, q10, для него определяется сумма значений целевой функции (Lp)u ((Tp)u, (Aep)u либо (Cp)u) между оптимизируемой точкой и двумя соседними точками траектории по (4.108), где u [1;
(dip∙2+djp∙2+dkp∙2+dlp∙2)] – индекс, соответствующий уникальному сочетанию значений индексов i, j, k, l и координат q7, q8, q9, q10. Для каждого значения u из приведенного диапазона в массиве [tgu] запоминаются соответствующие текущие значения координат (q7)u, (q8)u, (q9)u, (q10)u. Предварительно до начала вложенных циклов по i, j, k, l, все элементы векторов значений целевой функции (Lp)u ((Tp)u, (Aep)u либо (Cp)u) заполняются бесконечно большими значениями.
5.По выходе из циклов по i, j, k, l определяется значение индекса um, соответствующее минимальному значению (Lp1)u:
um=Индекс(min({(Tp)u})); um=Индекс(min({(Aep)u})); um=Индекс(min({(Cp)u})). (4.111)
212
|
|
|
Пуск |
|
1 |
|
|
|
2 |
Ввод исходных данных: S; q8min; q8max; q9min; q9max; q10min; q10max; [YЭ]; |
|
||||||||
|
|
dip; djp; dkp; dlp; |
lл; |
uл; δopt |
|
|
|
|
|
|
|
|
opt=0; Lopt =∞ |
3 |
|
|
4 |
||
|
|
|
|
|
|
||||
|
|
|
6 |
Да |
Вывод результатов: Sopt |
|
|||
((Lopt–1)– Lopt)/( Lopt–1)≤δopt |
|
|
Останов |
||||||
|
|
|
|||||||
|
|
|
|
|
|
9 |
|||
|
Нет |
|
|
|
|
|
|
5 |
|
|
|
|
|
|
u=u+1 |
|
|
||
|
|
8 |
|
|
|
|
|
||
p |
7 |
i |
|
|
break=0 |
10 |
|
|
|
|
|
|
|
|
|||||
p=2; p≤sm–1; |
|
|
|
|
11 |
||||
i=ip–dip; i≤ ip+dip; |
|
|
|
|
|||||
p=p+1 |
|
|
q7=q7p+i∙Δuл; q8=q8p+j∙Δuл; |
|
|||||
|
i=i+1 |
|
|
|
|||||
|
12 |
|
|
q9=q9p+k∙Δlл; q10= q10p+l∙Δlл |
|
||||
|
j |
13 |
|
|
|||||
u |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
|
j=jp–djp; j≤ jp+djp; |
|
|
|
|
|
|
||
u=0; |
|
|
|
|
|
16 |
|
||
|
j=j+1 |
|
|
|
|
|
|
||
u≤(dip∙2+djp∙2+ |
15 |
|
(q8<q8min) (q8>q8max) |
|
Нет |
||||
k |
|
|
|||||||
+dkp∙2+dlp∙2); |
|
|
(q9<q9min) (q9>q9max) |
|
|
||||
u=u+1 |
14 |
k=kp–dkp;k≤kp+dkp; |
|
(q10<q10min) (q10>q10max) |
|
|
|||
(Lp)u = ∞ |
k=k+1 |
|
|
|
|
|
|
|
|
|
l |
19 |
|
|
Да |
|
|
|
|
|
18 |
|
|
|
17 |
|
|
||
|
l=lp–dlp; l≤lp+dlp; |
|
|
break=1 |
|
|
|||
u |
|
l=l+1 |
|
|
|
|
|
|
24 |
|
|
20 |
|
Проверка пересечений точки |
|||||
|
|
|
|
|
|||||
|
|
|
|
|
q7, q8, q9, q10 по алгоритму |
|
|||
|
|
l |
|
|
проверки пересечений раздела |
|
|||
|
|
|
22 |
|
|
4.8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
u=0 |
21 |
k |
|
Нет |
Пересечения |
25 |
Да |
|
|
|
|
|
|
||||||
|
|
|
|
26 |
|||||
|
|
|
23 |
|
|
имеют место? |
|
||
|
|
|
|
|
|
|
break=1 |
||
|
|
j |
|
|
Нет |
27 Да |
|
|
|
|
30 |
|
29 |
|
|
break=0 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
p |
|
i |
|
|
|
|
|
|
28 |
|
|
|
Lp=L(p, p–1)+L(p, p+1) |
|
|
||||
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|||
|
31 |
|
|
|
|
|
|
|
32 |
opt=opt+1 |
Определение значения целевой функции для всей |
|
|||||||
|
|
траектории Lopt по (4.4), (4.5), (4.6) |
|
|
|
||||
|
|
|
|
|
|
||||
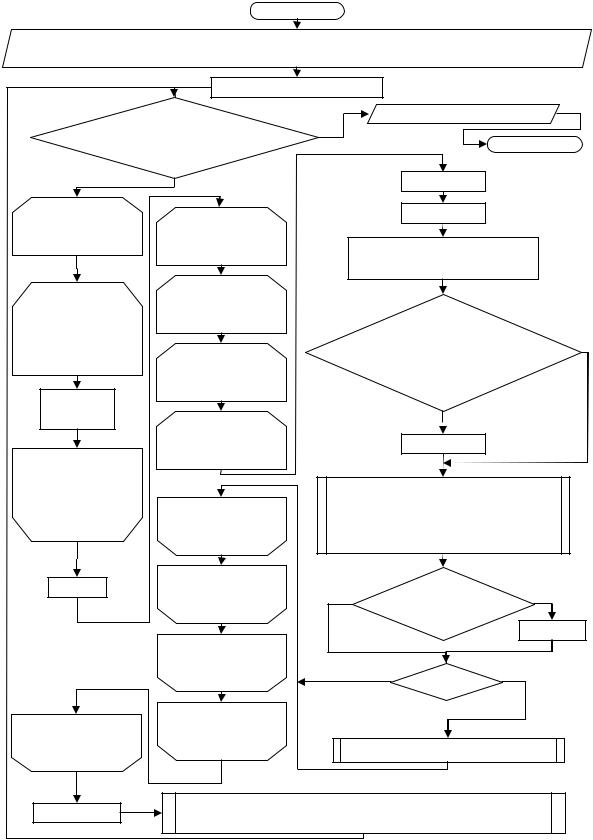
Рис. 4.23. Блок-схема алгоритма дискретной локальной оптимизации траектории в пространстве конфигураций ГПК
213
Функцией Индекс обозначено выполнение известного алгоритма определения номера минимального элемента одномерного массива [74].
6. Оптимальные значения координат q7p, q8p, q9p, q10p точки sp восстанавливаются по значению um из массива [tgu]:
q7p=q7um; q8p= q8um; q9p= q9um; q10p= q10um. |
(4.112) |
7. Оптимизация по текущей точке sp завершается, и начинается оптимизация по следующей точке sp+1:
p=p+1. (4.113)
После выполнения п. 7. начинается выполнение с п. 1 с новым значением индекса p, который для каждой траектории изменяется в диапазоне p [2; (sm–1)]. После того, как p достигает значения (sm–1), по (4.4), (4.5), либо (4.6) определяется значение целевой функции Topt, Aeopt, либо Copt соответственно для траектории Sopt на итерации opt.
Затем начинается следующий цикл оптимизации: p=2, 3,…, (sm–1) и.т.д. Оптимизация отдельной траектории прекращается при выполнении условия окончания расчета, которое заключается в снижении относительного убывания значения целевой функции на текущей итерации ниже заданного порогового значения δopt:
((Topt–1)–Topt)/(Topt–1)≤δopt; ((Aeopt–1)–Aeopt)/(Aeopt–1)≤δopt;
((Copt–1)–Copt)/(Copt–1)≤δopt. (4.114)
После этого выводится оптимизированная траектория Sopt. Блок-схема алгоритма дискретной локальной оптимизации от-
дельной траектории в пространстве конфигураций ГПК приведена на рис. 4.23.
Алгоритм локальной дискретной оптимизации траектории в пространстве конфигураций может быть применен в составе различных алгоритмов планирования траектории в пространстве конфигураций ГПК при сохранении постановки задачи.
214