Материал: 2426
Вывод коэффициентов полинома четвертой степени для системы уравнений (4.15)–(4.18).
В уравнении тора (4.18), согласно выражению (4.16), в принятой системе координат x2+z2=ρ2. В то же время, согласно (4.30), ρ2 может быть выражено через y. Подставив (4.30) в (4.18), получим уравнение с одним неизвестным:
(h12 + (y × к + y0 )2 + y2 + R2 - r2 )2 - |
|
|||||||
- 4 × R2 × (h12 + (y × к + y0 )2 )= 0. |
|
(4.74) |
||||||
Дальнейшие преобразования приводятся без пояснений: |
||||||||
(h 2 + y2 |
× к2 + 2 × y × к × y |
0 |
+ y 2 + y2 + R2 |
- r2 )2 - |
||||
1 |
(h 2 + y2 × к2 |
|
0 |
|
+ y 2 )= 0; |
|
||
- 4 × R2 × |
+ 2 × y × к × y |
0 |
|
|||||
|
1 |
|
|
|
0 |
|
|
|
(y2 ×(к2 +1)+y×(2×к×y )+(h2 |
+y 2 +R2 |
-r2))2 - |
|
|
||||
|
0 |
1 |
|
0 |
|
|
|
|
-4×R2 ×h |
2 -4×R2 ×y2 ×k2 |
-4×R2 ×y×2×k×y -4×R2 ×y 2 |
=0; |
|||||
1 |
|
|
|
|
0 |
0 |
|
|
y4 ×(к2 +1)2 + y3 ×(2×(к2 +1)× 2×к × y0 )+
+ y2 ×(2×(h 2 + y 2 + R2 - r 2 ))+ y2 ×(2×к × y )2 +
+y ×(2× 2×к × y0 ×(h12 + y02 + R2 - r 2 ))+
+(h12 + y02 + R2 - r 2 )2 - 4× R2 × h12 - 4× R2 × y2 ×к2 -
- 4× R2 × y × 2× к × y0 - 4 × R2 × y02 = 0.1 0 0
Если обозначить
(к2 +1)2 = s1;
(2 × (к2 +1)× 2 × к × y0 )= s2 ;
2× (h12 + y02 + R2 - r2 )+ 22 × к2 × y02 - 4× R2 × к2 = s3;
4×к × y0 ×(h12 + y02 + R2 - r2 )- 4× R2 ×2×к × y0 = s4 ;
(h12 + y02 + R2 - r2 )2 - 4× R2 ×h12 - 4× R2 × y02 = s5 ,
то может быть получена классическая форма полинома четвертой степени:
y4·s1+y3·s2+y2·s3+y·s4+s5=0, |
(4.75) |
200 |
|


 2
2 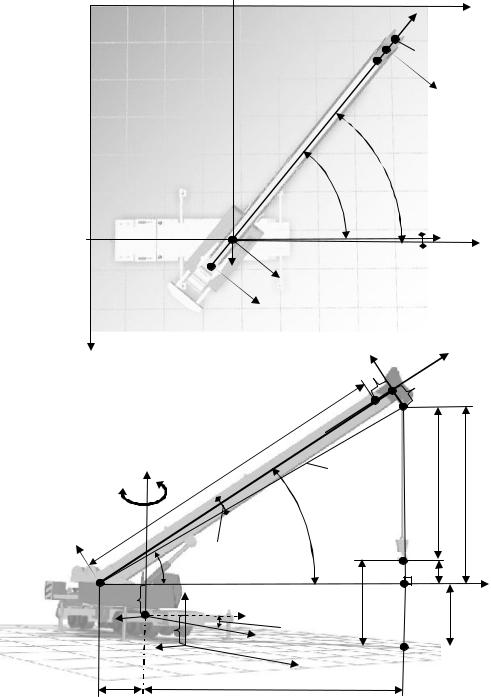
Точка 1 (ρ=ρ1): |
q8=q8max; q9=q9min; |
(4.79) |
Точка 2 (ρ=ρ2): |
q8=q8max; q9=q9max; |
(4.80) |
Точка 3 (ρ=ρ3): |
q8=q8min; q9=q9min; |
(4.81) |
Точка 4 (ρ=ρ4): |
q8=q8min; q9=q9max. |
(4.82) |
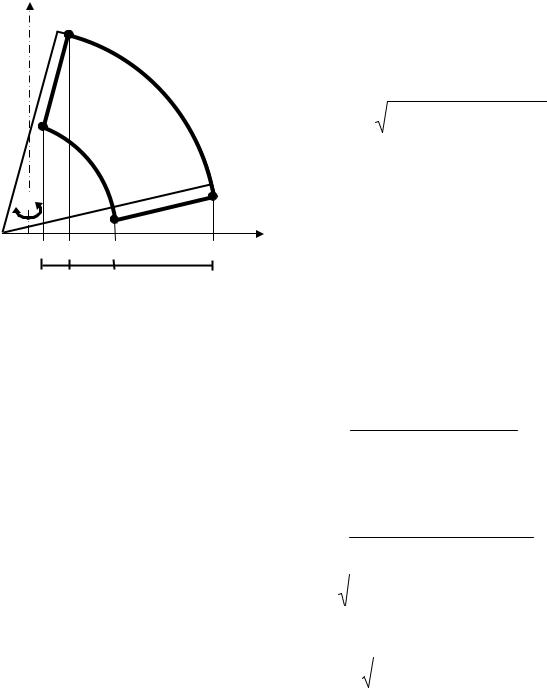
Для каждого сочетания зна- Y1 2 чений q8 и q9 используется после-
довательность вычислений:
|
|
|
|
q8,1=arctg(y4,43/(x3,33+q9)); |
||||
|
1 |
|
|
R2,5 = (x3,33 + q9 )2 + y4,432 ; |
||||
|
|
|
|
|
|
q8,2=q8–q8,1; |
(4.83) |
|
|
|
|
4 |
ρ=R2,5∙cos q8,2 – x1,2. |
(4.84) |
|||
|
|
|
По (4.83)–(4.84) определяют- |
|||||
|
|
3 |
ρ |
|||||
|
|
ся последовательно 4 постоянных |
||||||
ρ1 |
ρ2 |
ρ3 |
ρ4 |
значения: ρ1, ρ2, ρ3, ρ4. |
|
|
||
Рис. 4.19. К определению диапазонов |
2.2. По заданному текущему |
|||||||
значению |
ρ |
определяются |
гра- |
|||||
|
|
вылета ρ |
|
ничные |
значения |
диапазонов |
||
|
|
|
|
|||||
|
|
|
|
управляемых координат [q8В |
q8Н]; |
|||
При ρ1≤ρ<ρ2 |
|
[q9В q9Н]. |
|
|
|
|
||
|
|
|
|
|
|
|||
q8В=q8max;
q8Н=arctg(y4,43/(x3,33+q9min))+arccos((x1,2+ρ)/ 
 y4,432 +(x3,33 + q9min )2 ); (4.85)
y4,432 +(x3,33 + q9min )2 ); (4.85)
q9В=(x1,2+ρ–y4,43∙sin q8max)/cos q8max – x3,33;
q9Н=q9min.
При ρ2≤ρ<ρ3
q8В=arctg(y4,43/(x3,33+q9max))+arccos((x1,2+ρ)/ 
 y4,432 + (x3,33 + q9max )2 );
y4,432 + (x3,33 + q9max )2 );
q8Н=arctg(y4,43/(x3,33+q9min))+arccos((x1,2+ρ)/ |
|
|
); |
|
|
y4,432 +(x3,33 +q9min )2 |
(4.86) |
||||
q9В=q9max; q9Н=q9min. |
|
|
|||
При ρ3≤ρ≤ρ4 |
|
|
|||
q8В=arctg(y4,43/(x3,33+q9max))+arccos((x1,2+ρ)/ |
y4,432 + (x3,33 + q9max )2 |
); |
|||
q8Н=q8min; q9В=q9max; |
(4.87) |
||||
q9Н=(x1,2+ρ–y4,43∙sin q8min)/cos q8min – x3,33. |
|
|
|||
В случае, если значение вылета ρ находится вне интервала конструктивно допустимых значений
203
ρ [ρ1; ρ4 ], |
(4.88) |
делается вывод о невозможности обеспечить требуемые координаты груза при текущем положении базового шасси ГПК, алгоритм завершает свою работу.
2.3. По текущему значению ρ и граничным значениям координат [q8В q8Н]; [q9В q9Н] определяются граничные значения диапазона управляемой координаты [q10В q10Н].
ρ [ρ1;ρ4 ], используя (4.83), получим
y5,7=tg(q8–arctg(y4,43/(x3,33+q9)))∙(ρ+x1,2). |
(4.89) |
Согласно схеме на рис. 4.18, б, |
|
q10=y5,7 – y6,7 = y5,7 – (yгр– y0,7)= y5,7 – (yгр– (q2+y1,2))= |
|
= tg(q8–arctg(y4,43/(x3,33+q9)))∙(ρ+x1,2) – (yгр– (q2+y1,2)), |
(4.90) |
где y4,43 x3,33 x1,2 y1,2 – постоянные конструктивные значения. |
|
Соответственно значения [q10В q10Н] определятся как |
|
q10Н = tg(q8Н –arctg(y4,43/(x3,33+q9Н)))∙(ρ+x1,2) – (yгр– (q2+y1,2)); |
|
q10В = tg(q8В –arctg(y4,43/(x3,33+q9В)))∙(ρ+x1,2) – (yгр– (q2+y1,2)). |
(4.91) |
2.4. В случае, если полученное по (4.91) значение q10В меньше минимальной конструктивно возможной длины грузовой лебедки от оголовка стрелы
q10В<q10min, |
(4.92) |
делается вывод о невозможности обеспечить требуемые координаты груза, алгоритм завершает свою работу.
Если выполняется условие
q10В≥q10min q10Н<q10min, |
(4.93) |
где – знак логического умножения (конъюнкции), т.е. точка подвеса груза расположена внутри пространства возможных положений оголовка стрелы (позиция 4 на рис. 4.7), q10Н корректируется:
q10Н=q10min. (4.94)
После этого также последовательно корректируются значения q9Н и q8Н по (4.97) и (4.96) с подстановкой значения q10Н.
204