Материал: 2426
При подстановке yв и yн в формулу (4.47) вместо y получаются соответствующие значения ρв и ρн.
В координатах (ρ–Y1) уравнение прямой, проходящей через две точки (ρв, yв) и (ρн, yн), выглядит следующим образом:
ρ- ρн = y - yн .
ρв - ρн yв - yн
Отсюда
(ρв - ρн ) |
|
æ |
ρн - |
yн ×(ρв - ρ |
н ) |
ö |
|
ç |
÷ |
||||
|
(yв - yн ) |
|
||||
ρ = y × (yв - yн ) |
+ |
èç |
|
ø÷. |
При обозначении
(ρ - ρ ) |
|
ρ0 p |
кp = (yвв - yнн) |
; |
уравнение (4.49) запишется в виде
ρ = y × кp
= ρ - yн ×(ρв - ρн )
н (yв - yн )
+ ρ0 p .
(4.48)
(4.49)
(4.50)
(4.51)
Далее необходимо решить систему из двух уравнений (4.51) и (4.34), т.е. найти точку пересечения прямой и дуги окружности. При подстановке (4.51) в (4.34) получается
|
(y × кp + (ρ0 p - c1 ))2 + y2 = R3 |
2 . |
|
(4.52) |
После разложения |
|
|
|
|
y2 × кp2 + 2 × y × кp ×(ρ0 p - c1 )+ (ρ0 p - c1 )2 + y2 = R32 . |
|
|||
После комплектования по степеням y |
|
|
|
|
y2 × (1+ кp |
2 )+ y ×(2 × кp ×(p0 p - c1 ))+ ((p0 p - c1 )2 - R3 |
2 )= 0 . |
(4.53) |
|
При обозначении |
|
|
|
|
s1=1+кp2; s2=2·кp·(ρ0p–c1); s3=(ρ0p–c1)2–R32 |
(4.54) |
|||
уравнение (4.53) запишется в виде |
|
|
|
|
|
y2·s1+y·s2+s3=0. |
|
|
(4.55) |
190
Решения данного квадратного уравнения имеют вид
|
|
|
|
|
|
|
|
|
y = |
- s |
2 |
± s |
2 - 4 × s × s |
|
|||
|
2 |
1 3 |
. |
(4.56) |
||||
|
|
|
|
|
||||
1,2 |
|
|
2 |
× s1 |
|
|||
|
|
|
|
|||||
После того, как два решения (4.56) найдены, необходимо отбросить все комплексные и отрицательные корни. Останется одно решение либо вообще ни одного. Последнее означает, что прямая не пересекает окружность.
Для пересечения линии грузового каната с дугой 3 может быть получено и решено уравнение, аналогичное (4.55).
Сравнительные расчеты показали, что полученное по формуле (4.56) приближенное решение расходится с истинным значением на несколько десятых долей миллиметра (максимально), что можно считать незначительной погрешностью при перемещении грузов.
После того, как найдено решение y по формулам (4.56), (4.41) или (4.42), по координате y оголовка стрелы и уравнению прямой в пространстве (4.15) могут быть найдены две других координаты оголовка x и z:
x = |
(y - y1 )×(x2 - x1 ) |
+ x ; |
(4.57) |
|||
(y2 − y1 ) |
||||||
|
|
1 |
|
|||
|
|
|
|
|||
z = |
|
(y - y1 )×(z2 - z1 ) |
+ z . |
(4.58) |
||
|
|
|||||
|
|
(y2 − y1 ) |
1 |
|
||
|
|
|
|
|||
Затем могут быть определены все управляемые координаты ГПК, соответствующие данному положению точки оголовка стрелы:
q7=arctg(z/x). (4.59)
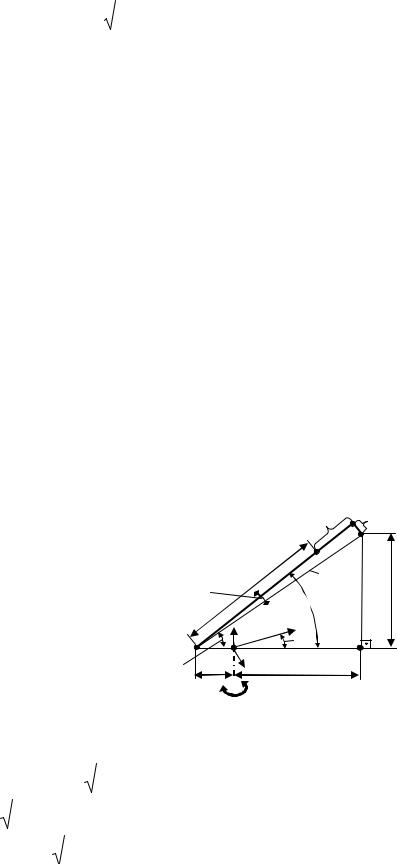
Подсчитав предварительно ρ по формуле (4.16) и используя схему на рис. 4.13, получаются выражения:
|
|
q9 |
c3 |
q8,1 |
c2 |
R |
y |
|
q8 |
||
|
|
|
|
|
Y1 |
X1 |
|
|
q7 |
|
|
|
Z1 |
|
|
q8,2 c1 |
ρ |
|
|
|
|
Рис. 4.13. Схема для определения координат q7, q8 и q9
R = |
|
|
|
|
|
|
|
||
(c2 + q9 )2 |
+ c3 |
2 |
|
; |
(4.60) |
||||
|
|
|
= y2 + (c1 |
+ ρ)2 ; |
|
||||
(c2 + q9 )2 + c3 |
2 |
(4.61) |
|||||||
q9 = |
y2 + (c1 + ρ )2 |
- c3 |
2 |
- c2 . |
(4.62) |
||||
191 |
|
|
|
|
|
|
|
||

q8,1=arctg(c3/(c2+q9)); |
|
|
|
(4.63) |
||||
|
|
|
|
|
); |
|
|
|
q8,2=arccos((c1+ρ)/ c3 |
2 + (c2 |
+ q9 )2 |
(4.64) |
|||||
|
|
|
|
). |
|
|||
q8=q8,1+q8,2=arctg(c3/(c2+q9))+arccos((c1+ρ)/ c3 |
2 |
+ (c2 + q9 )2 |
(4.65) |
|||||
Длина грузового каната от оголовка стрелы до точки подвеса груза определится как расстояние между двумя точками с координатами
(x,y,z) и (x1,y1,z1):
q10 = |
|
. |
|
(x − x1 )2 + (z − z1 )2 + (y − y1 )2 |
(4.66) |
Таким образом, последовательность алгоритма нахождения максимальных и минимальных значений диапазонов управляемых координат ГПК следующая:
-по формулам (4.41), (4.42) и (4.56) находится от 2 до 4 действительных неотрицательных решений систем уравнений;
-для каждого из найденных решений по формулам (4.59), (4.62), (4.65), (4.66) определяются соответствующие значения управляемых обобщенных координат ГПК q7, q8, q9, q10;
-осуществляется проверка найденных значений q7, q8, q9, q10 на попадание каждого из них внутрь интервала допустимых конструкцией ГПК значений:
q7min<q7< q7max; q8min<q8< q8max; q9min<q9<q9max; q10min<q10<q10max. (4.67)
Не попадающие внутрь соответствующего интервала значения q7, q8, q9, q10 отбрасываются. В результате остается по два значения каждой управляемой координаты либо вообще ни одного. Два значения каждой координаты и определят искомые диапазоны управляемых координат.
В результате получаются четыре диапазона управляемых координат:
[q7В q7Н]; [q8В q8Н]; [q9В q9Н]; [q10В q10Н], |
(4.68) |
где q7В, q8В, q9В, q10В – верхние, а q7Н, q8Н, q9Н, q10Н – соответственно нижние значения координат.
При выходе любой из четырех координат (q7, q8, q9, q10) за границы соответствующего диапазона обеспечить требуемые координаты точки подвеса груза становится невозможно.
Далее необходимо задать значение любой из четырех управляемых координат (q7, q8, q9, q10) внутри своего диапазона, и по нему вычислить значения трех других управляемых координат.
192
Если в результате проверки выполнения условий (4.67) не остается ни одного значения управляемых координат, это значит, что координаты точки подвеса груза находятся вне зоны досягаемости, за пределами конструктивных ограничений на управляемые координаты ГПК.
Варианты задания каждой из координат (q7, q8, q9, q10) и методики вычисления по ней остальных приведены ниже.
Задана координата q7.
Исходя из (4.59)
z/x=tg(q7); |
(4.69) |
z=x·tg(q7). |
(4.70) |
Из уравнения (4.20) прямой по двум точкам выражается x:
x = (z - (z1 )×-(x2 )- x1 ) + x1. z2 z1
При подстановке вместо z выражения (4.70) получается
x = (x × tg(q7()z- z1z)×)(x2 - x1 ) + x1;
2 - 1
x = |
x × tg(q7 )× x2 |
- |
x × tg(q7 )× x1 |
- |
z1 ×(x2 - x1 ) |
+ x ; |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
(z2 - z1 ) |
|
|
|
|
(z2 - z1 ) |
|
|
(z2 - z1 ) |
|
|
1 |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
æ |
|
|
tg(q7 )× |
(x2 |
|
|
ö |
æ |
z1 ×(x2 - x1 ) |
|
|
ö |
|
|
|||||||||||||||
ç |
|
|
- x1 ) |
÷ |
ç |
- x1 |
÷ |
= 0 ; |
|||||||||||||||||||||
|
|
|
|
- z |
) |
|
|
|
|||||||||||||||||||||
x ×ç1- |
|
|
(z |
2 |
÷ |
+ ç |
|
(z |
2 |
- z ) |
÷ |
||||||||||||||||||
è |
|
|
|
|
|
|
1 |
|
ø |
è |
|
|
|
|
1 |
|
|
|
ø |
|
|
||||||||
æ |
|
|
|
z1 |
×(x2 - x1 ) |
ö |
æ |
|
|
tg(q7 )×(x2 |
- x1 ) |
ö |
|||||||||||||||||
x = ç x |
- |
÷ |
ç1 |
- |
÷. |
||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||||
ç |
|
1 |
|
(z |
2 |
- z ) |
÷ |
ç |
|
|
|
|
|
|
(z |
2 |
- z |
) |
|
|
÷ |
||||||||
è |
|
|
|
|
|
|
|
1 |
ø |
è |
|
|
|
|
|
|
|
|
1 |
|
|
ø |
|||||||
(4.71)
(4.72)
Затем по формуле (4.70) находится z.
После этого по формуле (4.16) может быть определен вылет ρ, а затем по (4.29) – координата y. Используемые в (4.29) параметры h1 и к были определены ранее и остаются неизменными для заданной точки закрепления груза.
193
x,y,z, м |
|
|
|
|
15 |
|
x1,0 |
|
|
y1,0 |
|
|
|
|
10 |
|
|
|
z1,0 |
5 |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
-5 |
|
|
|
|
-10 0 |
10 |
20 |
t, c |
40 |
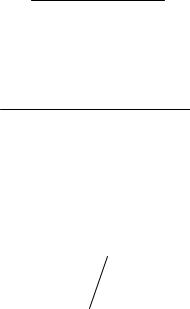
Рис. 4.14. Закон изменения обобщенных координат точки подвеса груза в инерциальной системе координат (пример)
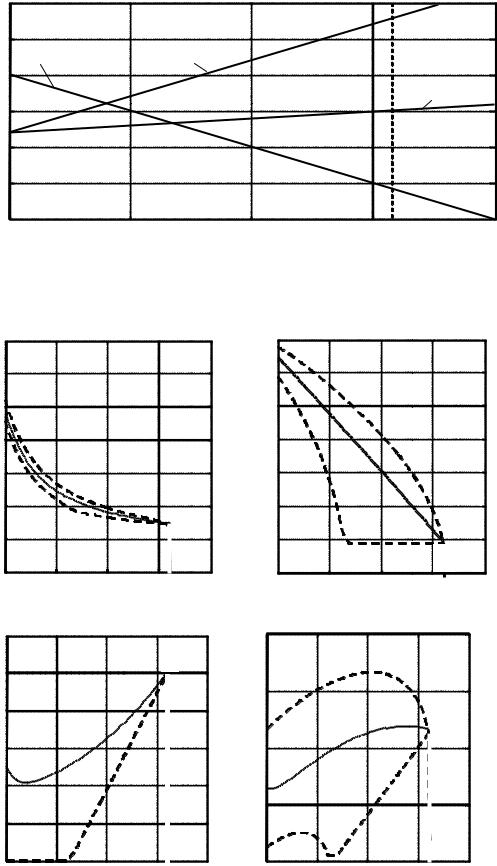
q7, |
|
|
|
|
q8, |
|
|
|
|
|
|
|
|
рад |
|
|
|
|
|
рад |
|
|
|
|
|
|
|
|
|
|
|
|
|
1.2 |
|
|
|
|
|
1.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
0.8 |
|
|
|
|
0.8 |
|
|
|
|
0.6 |
|
|
|
|
0.6 |
|
|
|
|
0.4 |
|
|
|
|
0.4 |
|
|
|
|
0.2 |
|
|
|
|
0.2 |
|
|
|
|
0 |
10 |
20 |
t, c |
40 |
0 |
10 |
20 |
t, c |
40 |
q9, |
|
|
|
|
q10, |
|
|
|
|
м |
|
|
|
|
м |
|
|
|
|
10 |
|
|
|
|
15 |
|
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
10 |
|
|
|
|
4 |
|
|
|
|
5 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
10 |
20 |
t, c |
40 |
0 |
10 |
20 |
t, c |
40 |
|
|
|
|
|
194 |
|
|
|
|