Материал: 2426
é |
–cosq6g×cosq5g |
|
sinq5g |
|
-sinq6g ×cosq5g |
|
q1g |
ù |
|
|
|
||||||
ê |
|
|
|
|
|
|
|
ú |
sinq6g×sinq4g - |
|
cosq5g × |
|
cosq6g ×sinq4g + |
|
q |
||
ê-cosq6g ×cosq4g ×sinq5g |
|
×cosq4g |
|
+sinq6g×cosq4g×sinq5g |
|
2g ú |
||
Tg= ê |
sinq6g×cosq4g + |
|
-cosq5g× |
|
cosq6g ×cosq4g - |
|
q |
ú. (4.10) |
ê |
+cosq6g ×sinq4g ×sinq5g |
|
×sinq4g |
|
-sinq6g×sinq4g×sinq5g |
|
3g |
ú |
0 |
|
0 |
|
0 |
|
1 |
||
ë |
|
|
|
û |
||||
Координаты точки 1 в инерциальной системе координат обозначены как x1,0, y1,0, z1,0, а координаты точки 3 в инерциальной системе – как x3,0, y3,0, z3,0. Координаты точки 3 должны удовлетворять условиям:
x3,0=x1,0; y3,0=y1,0+q10, ; z3,0=z1,0, |
(4.11) |
где q10 – длина грузового каната, на которую, как и на все прочие управляемые координаты ГПК, конструктивно установлены извест-
ные предельные ограничения (q10min<q10<q10max).
Поскольку диапазон значений управляемой координаты q10 [q10В q10Н] изначально неизвестен, координаты точки 3 на данном этапе не могут быть найдены.
Используется точка 2 с координатами x2,0, y2,0, z2,0, расположенная также на грузовом канате, но выше точки 1 на любую известную (заданную) длину, например на 1 м. Тогда ее координаты в инерциальной системе могут быть определены как
x2,0=x1,0; y2,0=y1,0+1; z2,0=z1,0. |
(4.12) |
После того, как определены декартовы координаты точки 2 на грузовом канате и точки 1 подвеса груза, появляется возможность определения по ним диапазонов управляемых координат крана.
Базовое шасси крана в процессе работы должно оставаться неподвижным, поэтому первые 6 координат крана q1,…, q6 считаются постоянными. Их значения должны быть предварительно определены (измерены после установки выносных опор и фиксации базового шасси крана).
Задачу предлагается декомпозировать на несколько этапов. Вначале выражаются координаты точек 1 и 2, найденных в инерциальной системе координат, в локальной системе координат базового шасси крана O1X1Y1Z1. Для этого необходимо получить матрицу перехода от базового шасси крана к инерциальной системе координат T1 по формуле, аналогичной (4.9), с координатами q1… q6 в элементах матриц-
180
сомножителей, а затем обратить ее. Обратная матрица (T1)-1 будет выражать переход от инерциальной системы координат к системе координат базового шасси. Тогда вектор точки 1 в системе O1X1Y1Z1 определится как
R |
= (T )−1 |
× R , |
(4.13) |
1,1 |
1 |
1,0 |
|
где R1,0 – вектор положения точки 1 в инерциальной системе коорди-
нат вида [x1,0 y1,0 z1,0 1], компоненты которого найдены по формуле
(4.8).
Вектор точки 2 в системе O1X1Y1Z1 определится как
R |
= (T )−1 |
× R , |
(4.14) |
2,1 |
1 |
2,0 |
|
где R2,0 – вектор положения точки 2 в инерциальной системе коорди-
нат вида [x2,0 y2,0 z2,0 1], компоненты которого найдены по формуле
(4.12).
Полученные значения координат в системе базового шасси обо-
значены как (x1, y1, z1) для точки 1 и (x2, y2, z2) для точки 2. Используется известная форма записи уравнения прямой линии в
пространстве, проходящей через две точки с координатами x1, y1, z1 и x2, y2, z2:
x − x1 |
= |
y − y1 |
= |
z − z1 |
. |
(4.15) |
||||||
|
|
|
||||||||||
x |
2 |
− x |
|
y |
2 |
− y |
|
z |
2 |
− z |
|
|
|
1 |
|
|
1 |
|
|
1 |
|
|
|||
Для того чтобы определить диапазоны управляемых координат ГПК, необходимо найти точки пересечения этой прямой, совпадающей с направлением грузового каната и гравитационной вертикали, и границ некоторого пространства всевозможных значений первых трех управляемых координат крана q7, q8, q9. Сечение данного пространства любой плоскостью, проходящей через ось вращения поворотной колонки ГПК, показано на
Y1 |
2 |
Телескопическая |
|
||
|
стрела |
|
|
|
|
q8max |
|
4 |
3
c1 |
|
1 |
ρ |
ρ |
|
|
|
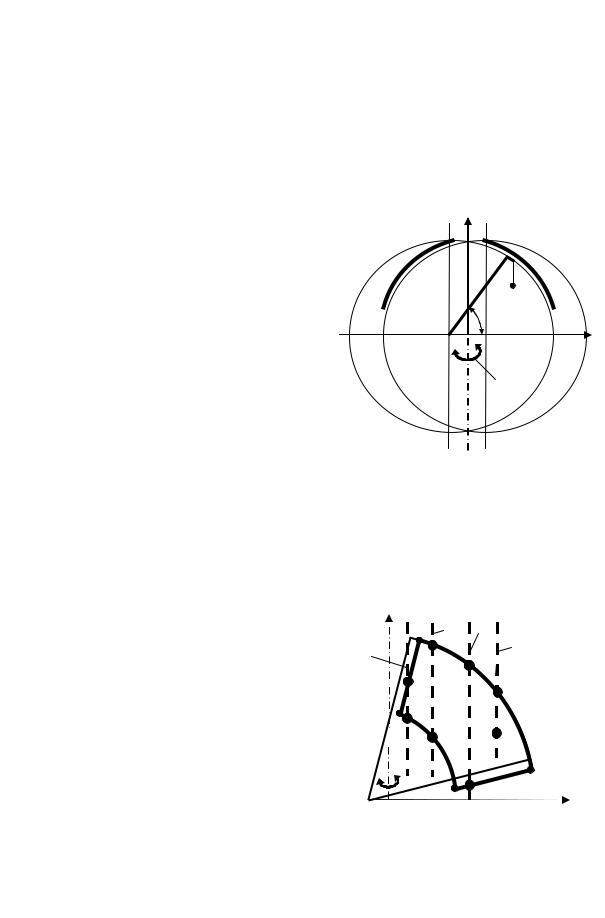
Рис. 4.3. Область возможных положений оголовка стрелы ГПК
в координатах «вылет–высота» (ρ–Y1)
181
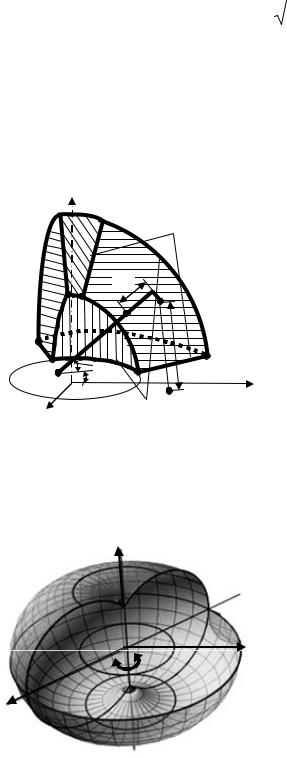
рис. 4.3. Это будет область возможных положений оголовка стрелы ГПК в координатах ρ–Y1. Здесь ρ – вылет стрелы. Его значение связано со значениями декартовых координат x и z оголовка стрелы в системе базового шасси зависимостью
|
|
|
|
ρ = x2 + z2 . |
(4.16) |
||
На рис. 4.3 прямые 1 и 2 – это образующие конических поверхностей, на которых угол подъема стрелы q8 принимает соответственно минимальное и максимальное значения, а дуги окружностей 3 и 4 – образующие торовых поверхностей, на которых величина выдвижения телескопического звена стрелы q9 соответственно минимальная и максимальная.
Y1 Конические 
 поверхности
поверхности
q9
q8 |
q10 |
X1 |
Z1 |
q7 |
Торовые |
поверхности
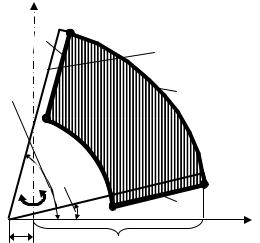
Рис. 4.4. Пространство возможных положений оголовка стрелы
Y2
X2
Z2
Рис. 4.5. Самопересекающийся тор – вид снаружи
То есть пространство возможных положений оголовка стрелы ГПК в системе координат O1X1Y1Z1 ограничено двумя коническими и двумя торовыми поверхностями, если ограничения по координате q7 отсутствуют, и дополнительно двумя плоскостями, если последние ограничения имеются (рис. 4.4).
Конструктивные ограничения для стреловых кранов имеются лишь по управляемым координатам
q8, q9 и q10, по координате q7 конструктивные ограничения отсутству-
ют.
Каждая из двух торовых поверхностей на рис. 4.4 – это внутренняя поверхность самопересекающегося тора (рис. 4.5, 4.6). Ось вращения тора будет совпадать с осью вращения поворотной части ГПК.
Чтобы определить диапазоны управляемых координат, необходимо найти две точки пересечения прямой линии грузового каната и граничных поверхностей простран-
182
ства возможных положений оголовка стрелы, если таковые сущест- |
|||||||||
вуют. Каждая точка, расположенная как внутри пространства воз- |
|||||||||
можных положений оголовка стрелы, так и на его границе, |
|||||||||
однозначно определяет значения всех четырех управляемых |
|||||||||
координат ГПК q7, q8, q9, q10. |
|
|
|
|
|||||
Нижняя (по координате y) из найденных двух точек будет соот- |
|||||||||
ветствовать минимальным значениям управляемых координат q8, q9, |
|||||||||
q10, а верхняя – соответственно максимальным. Данные две точки на- |
|||||||||
званы образующими интервал. |
|
|
|
||||||
Возможен вариант, когда точка |
|
Y2 |
|
||||||
подвеса |
груза |
сама |
расположена |
|
|
||||
|
|
|
|||||||
внутри |
пространства |
возможных |
|
|
|
||||
положений оголовка стрелы. Тогда |
|
|
q8 |
||||||
нижняя из двух образующих интер- |
|
|
|||||||
вал точек положения оголовка будет |
|
|
X1, X2 |
||||||
находиться не на границе простран- |
|
|
|||||||
|
|
q7 |
|||||||
ства, а внутри него, а именно выше |
|
|
|||||||
точки подвеса груза на минимально |
|
|
|
||||||
возможную длину грузового каната. |
|
|
|
||||||
То есть возможны три основных |
Рис. 4.6. Внутренняя поверхность |
||||||||
варианта расположения образующих |
|||||||||
интервал точек положения оголовка |
самопересекающегося тора |
||||||||
стрелы (рис. 4.7): 1 – верхняя точка |
|
|
|
||||||
на конической поверхности, нижняя на торовой поверхности; 2 – |
|||||||||
верхняя и нижняя точки на торовых поверхностях; 3 – верхняя точка |
|||||||||
на торовой поверхности, нижняя на конической поверхности. |
|||||||||
И, наконец, при любом из пере- |
Y1 |
2 |
3 |
||||||
численных трех вариантов возможно |
|||||||||
смещение нижней образующей ин- |
1 |
|
4 |
||||||
|
|
|
|||||||
тервал точки внутрь пространства, |
|
|
|
||||||
если точка подвеса груза располо- |
|
|
|
||||||
жена внутри пространства возмож- |
|
|
|
||||||
ных |
положений |
оголовка |
стрелы |
|
|
|
|||
(например, позиция 4 на рис. 4.7). |
|
|
|
||||||
Таким |
образом, |
необходимо |
|
|
ρ |
||||
найти |
декартовы координаты двух |
|
|
||||||
|
|
|
|||||||
образующих интервал точек в сис- |
Рис. 4.7. Варианты расположения |
||||||||
теме координат базового шасси, а по |
образующих интервал точек |
||||||||
ним – диапазоны значений управ- |
|
оголовка стрелы |
|||||||
ляемых координат ГПК q7, q8, q9, q10. |
|
|
|
||||||
183

Решение первой из указанных задач возможно в трехмерном евклидовом пространстве путем нахождения точек пересечения прямой, описываемой уравнением (4.15), и конической либо торовой поверхности.
Коническая поверхность описывается уравнением второго порядка
x2 |
+ |
z2 |
+ |
y2 |
= 0 , |
(4.17) |
|
a2 |
b2 |
c2 |
|||||
|
|
|
|
где a, b, c – некоторые постоянные.
Тор описывается уравнением четвертого порядка
(x2 + z2 + y2 + R2 - r2 )2 - 4× R2 ×(x2 + z2 )= 0, |
(4.18) |
где R – расстояние от центра окружности до оси вращения; r – радиус окружности.
Система уравнений (4.15), (4.17) для случая пересечения прямой с конусом может быть сведена к квадратному уравнению второго порядка с одним неизвестным и довольно просто решена, однако аналитическое решение системы уравнений (4.15), (4.18) для случая пересечения прямой с тором хотя и возможно путем сведения к полиному четвертой степени с одним неизвестным и нахождению его корней, но слишком сложно и громоздко для практического применения. Приведение формул решения занимает при этом несколько десятков страниц.
Гораздо проще и быстрее найти корни полинома четвертой степени численным методом с использованием средств вычислительной техники и специальных программных продуктов, реализующих известные итерационные методы: секущих, сопровождающей матрицы,
Лагерра и др. [65, 147, 191, 193].
Вывод коэффициентов полинома четвертой степени для системы уравнений (4.15)– (4.18) пересечения прямой с тором в трехмерном пространстве приведен ниже.
Задача нахождения координат образующих интервал точек в системе базового шасси может быть сравнительно просто решена аналитически, путем сведения пространственной задачи к плоской.
При переходе от трехмерной декартовой системы координат базового шасси к цилиндрической формулы перехода будут иметь вид
|
|
|
|
ρ = x2 + z2 ; q7=arctg(z/x); y=y. |
(4.19) |
||
184 |
|
||