Материал: 2426
зависящей от минимально допустимого по дополнительным условиям времени перемещения Ti,i–1 груза и звеньев ГПК из точки (i–1) траектории груза в точку i. Методика определения энергетической функции стоимости изменения управляемых обобщенных координат ГПК изложена в разделе 4.7.
3. Экономический критерий оптимальности – абсолютная стоимость эксплуатационных расходов C при перемещении подвижных звеньев ГПК из начального положения в конечное. Складывается из стоимости топлива (количество которого пропорционально сумме элементарных работ по отдельным управляемым координатам) и суммы стоимостей (часть затрачиваемого топлива, пропорциональная времени работы, амортизационные отчисления, отчисления на будущие ремонты по нормативам, заработная плата и т.д.), отнесенной ко времени работы машины. Определяется по зависимости, аналогичной (4.5), по методике раздела 4.7, при собственных значениях эмпирических коэффициентов:
nЛ |
+ (C8 )i,i−1 + (C9 )i,i−1 |
+ (C10 )i,i−1 + (CT )i,i−1), |
|
C = å((C7 )i,i−1 |
(4.6) |
||
i=2 |
|
|
|
где (C7)i,i–1, (C8)i,i–1, (C9)i,i–1, (C10)i,i–1 – суммы эксплуатационных расходов по отдельным управляемым координатам привода q7, q8, q9, q10
соответственно при перемещении из точки (i–1) траектории груза в точку i; (CT)i,i–1 – фиксированная составляющая эксплуатационных расходов, зависящая от минимального времени перемещения Ti,i–1 груза и звеньев ГПК из точки (i–1) траектории груза в точку i.
Предложенные критерии имеют практическую направленность. Аварийный характер работ, выполняемых в ряде случаев грузоподъемными кранами, выдвигает в качестве важнейшего показателя продолжительность производства работ, минимизировать которую позволяет предложенная методика определения временного критерия оптимальности T (быстродействия).
Использование энергетического и связанного с ним стоимостного критериев оптимальности позволяет снизить величину эксплуатационных расходов C при перемещении грузов в сложноорганизованном трехмерном пространстве с препятствиями.
4.3. Методика определения управляемых координат грузоподъемного крана по известным координатам груза
175
Задача определения управляемых координат механической системы машины по координатам рабочего органа, или обратная задача кинематики, является актуальной. Решение обратной задачи кинематики является неотъемлемой частью прикладных задач более высокого иерархического уровня, таких, как синтез и оптимизация конструктивных параметров машины, технологических параметров рабочего процесса и др. Прямое аналитическое решение этой задачи во многих случаях затруднено, хотя является наиболее предпочтительным по причине его максимальной точности.
Для ГПК решение обратной задачи кинематики необходимо при планировании траектории в пространстве конфигураций машины. Определенную сложность при этом создает кинематическая избыточность механической системы крана, которая приводит к неоднозначности решения задачи и требует поэтапного решения с наложением дополнительных ограничений.
Перемещение грузов свободно стоящим ГПК либо двумя стреловыми кранами является работой повышенной опасности. Опасность может возникнуть вследствие потери устойчивости, столкновения груза или элементов рабочего оборудования крана/кранов с препятствиями, неправильного распределения нагрузок на краны, расцепления груза со стропами из-за несогласованных действий крановщиков или разных скоростей механизмов подъема и перемещения кранов, участвующих в работе, раскачивания груза при наклонном положении канатов и т.д. [129, 169, 170]. Поэтому при необходимости перемещения краном груза строго по заданной траектории в пространстве (такая необходимость возникает в процессе совместной работы двумя или несколькими кранами с общим грузом, в стесненных условиях работы отдельного крана, при наличии преград и ограничений на перемещения и может быть реализована при помощи системы автоматического управления) необходимо решить задачу определения значений управляемых обобщенных координат отдельного крана по известным значениям координат точки груза.
Задача значительно усложняется, если необходимо учесть углы наклона базового шасси ГПК относительно горизонтальной плоскости, допустимые значения которых могут достигать 1,5°. Если углами наклона поворотной части пренебречь, то при их максимальных допустимых значениях (которые в реальных условиях эксплуатации могут быть и превышены) абсолютная погрешность задания координат
176
груза может достигать 0,5 м и более в зависимости от конструкции и типоразмера ГПК.
Методика определения значений управляемых координат ГПК по известным координатам груза с учетом углов наклона шасси заключа-
ется в следующем [107, 108, 109, 112, 113, 115, 116].
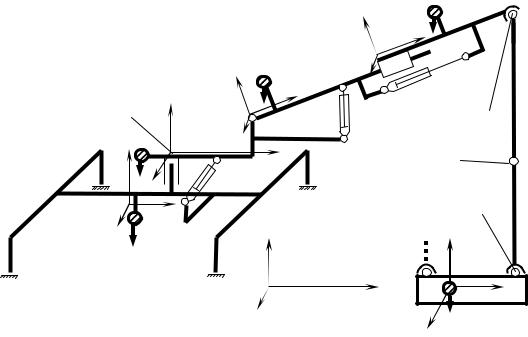
Постановка задачи. Если рассматривать груз и отдельный кран в левой инерциальной системе координат O0X0Y0Z0, ось Y0 которой направлена вдоль гравитационной вертикали, то с базовым шасси крана будет связана локальная система координат O1X1Y1Z1, а с грузом – локальная система координат OgXgYgZg (рис. 4.2).
Динамическая система крана представлена четырьмя звеньями. Это базовое шасси, поворотная платформа, стрела, телескопическое звено. Каждому звену соответствует своя локальная система координат.
Базовое шасси в транспортном режиме имеет 6 степеней свободы в инерциальной системе координат: перемещение центра масс базового шасси вдоль оси x0 (q1); перемещение центра масс базового шасси вдоль оси y0 (q2); перемещение центра масс базового шасси вдоль оси z0 (q3); поворот базового шасси вокруг оси x1 (q4); поворот базового шасси вокруг оси z1 (q5); поворот базового шасси вокруг оси y1 (q6).
|
|
Y4 |
X4 |
|
Y3 |
Z4 |
|
|
X3 |
|
|
Точка 4 |
Y2 |
|
|
|
Точка 3 |
||
|
Z3 |
|
|
Y1 |
Z2 |
X2 |
Точка 2 |
|
|
Точка 1 |
|
Z1 |
X1 |
|
|
|
Yg |
||
|
|
||
|
|
Y0 |
|
|
|
Xg |
|
|
|
X0 |
|
|
|
|
|
|
|
Z0 |
Zg |
|
|
|
Рис. 4.2. Расчетная схема для определения управляемых координат ГПК по координатам груза
177
Система ГПК в рабочем режиме будет иметь 4 степени свободы: поворот поворотной платформы вокруг оси y2 (q7); поворот стрелы вокруг оси z3 (q8); выдвижение телескопического звена вдоль оси x4 (q9); расстояние между точками оголовка стрелы и закрепления груза грузозахватным устройством (длина грузовой лебедки, q10). q10 – это расстояние между точками 1 и 3 на рис. 4.2.
Задача может быть сформулирована следующим образом: нахождение значений управляемых координат ГПК q7, q8, q9, q10 по известным (измеренным) постоянным в процессе работы значениям координат ГПК q1, q2, q3, q4, q5, q6 и заданным в инерциальной системе переменным значениям координат точки подвеса груза x, y, z.
Поскольку управляемых координат ГПК четыре (q7, q8, q9, q10) и они независимы друг от друга, а независимых координат точки груза всего три (x, y, z), данная задача может иметь бесконечное множество численных решений.
Однако, как будет показано далее, для определенных значений x, y, z, если только решение с учетом предельных ограничений существует, все управляемые координаты будут иметь диапазоны возможных значений со своими максимумом и минимумом.
Для практического использования методики необходимо задание значения одной из четырех управляемых координат q7, q8, q9, q10, причем задание его внутри возможного диапазона этой координаты для определенных x, y, z. Тогда остальные три управляемые координаты при этом могут быть вычислены однозначно, т.е. сначала необходимо найти диапазоны возможных значений q7, q8, q9, q10 для определенных координат груза x, y, z, а затем, задав одну из четырех управляемых координат внутри ее диапазона, вычислить остальные три.
Описание методики. Согласно Правилам техники безопасности при эксплуатации стреловых самоходных кранов ВСН 274-88, расположение грузового каната в процессе перемещения груза (несколькими кранами) должно оставаться вертикальным [169, 170]. Следовательно, необходимо обеспечить равенство координат точек 1, 2 и 3 (см. рис. 4.2) по осям X0 и Z0 инерциальной системы координат.
Если рассматривать перемещение груза в инерциальной системе координат, то его положение будет описываться временными зависимостями 6 координат: перемещение точки начала координат системы груза вдоль оси X0 (q1g); перемещение точки начала координат груза вдоль оси Y0 (q2g); перемещение точки начала координат груза вдоль
178
оси Z0 (q3g); поворот груза вокруг оси X1 (q4g); поворот груза вокруг оси Z1 (q5g); поворот груза вокруг оси Y1 (q6g).
Для определения обобщенных координат крана необходимо сначала перейти от обобщенных координат груза к координатам характерной точки груза в инерциальной системе (точка 1 закрепления груза грузозахватным устройством на рис. 4.2).
Определение взаимного положения звеньев крана и груза удобнее и легче всего свести к задаче преобразования одной системы связанных осей в другую, используя метод однородных координат [12, 72, 127].
Рассматриваемую точку 1 груза определяет в собственной локальной системе однородных координат груза вектор положения
R |
= [x |
y |
z |
1]T , |
(4.7) |
1g |
1g |
1g |
1g |
|
|
где x1g, y1g, z1g – координаты точки 1 в локальной декартовой системе координат груза.
В инерциальной системе координат точка 1 будет задана векто-
ром
R1,0 =Tg × R1g , |
(4.8) |
где Tg – матрица перехода от локальной системы координат звена груза к неподвижной инерциальной системе координат.
Tg=Ax∙Ay∙Az∙Aγ∙Aν Aω , |
(4.9) |
где шесть матриц-сомножителей выражают три линейных (Ax, Ay, Az) и три угловых (Aγ, Aν, Aω) перемещения для общего случая преобразования систем координат в трехмерном пространстве.
Элементы каждой из приведенных матриц-сомножителей размером 4×4 содержат одну из шести обобщенных координат груза q1g,…, q6g, которые считаются известными (заданными для каждого момента времени рабочего цикла согласно требуемой траектории перемещения груза в пространстве) [22, 153].
Матрица Tg будет иметь вид
179