Материал: 2426
Здесь координата q7 будет соответствовать углу поворота поворотной колонки, а координата ρ – вылету стрелы.
Если затем временно исключить из рассмотрения координату поворота q7, то получается плоская задача в декартовой системе координат «вылет–высота» (ρ–Y1). В данной системе координат коническая поверхность всегда проецируется в прямую линию, а торовая поверхность – в дугу окружности.
Определенная сложность воз- |
Y1 |
|
|
|
|||||||
никает в том, что прямая линия |
|
|
|
||||||||
|
|
|
|
||||||||
грузового каната, совпадающая с |
|
|
|
|
|||||||
гравитационной вертикалью, при |
|
|
|
|
|||||||
переводе в плоскую систему коор- |
|
|
|
|
|||||||
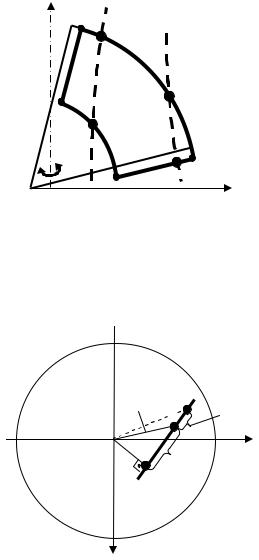
динат (ρ–Y1) получает вид кривой |
|
|
|
|
|||||||
второго порядка с небольшой кри- |
|
|
|
|
|||||||
визной, если углы наклона базово- |
|
|
|
|
|||||||
го шасси относительно гравитаци- |
|
|
|
ρ |
|||||||
онной вертикали имеют ненуле- |
|
|
|
||||||||
Рис. 4.8. Примерный вид линий |
|||||||||||
вые значения (рис. 4.8). |
|
||||||||||
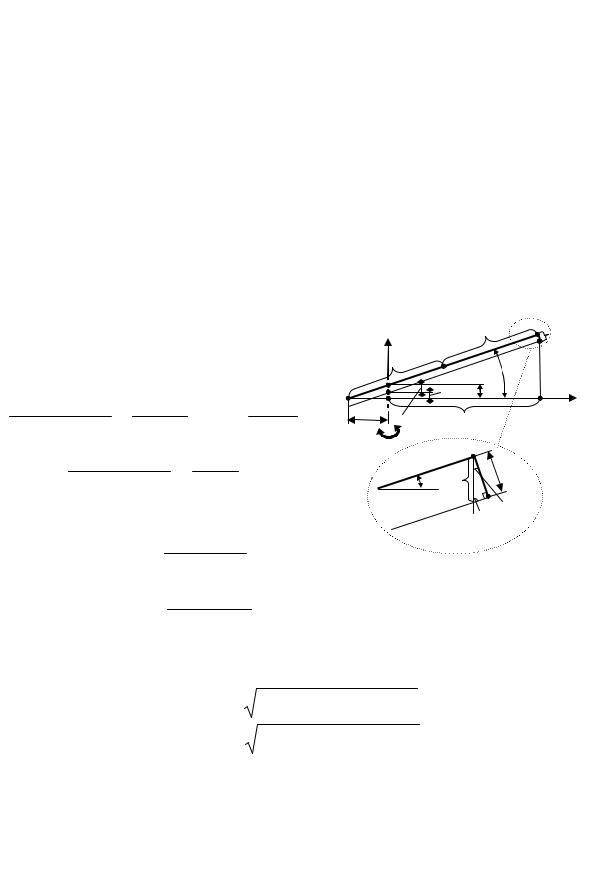
Чтобы |
получить |
наиболее |
грузового каната в системе координат |
||||||||
простой вид |
|
уравнения |
прямой |
(ρ–Y1) при ненулевых углах наклона |
|||||||
грузового каната в системе коор- |
шасси |
|
|
|
|||||||
|
|
|
|
||||||||
динат (ρ–Y1), используется схема, |
|
|
|
|
|||||||
приведенная на рис. 4.9. |
|
|
|
|
|
||||||
Уравнение прямой |
(4.15) в |
|
|
|
|
||||||
плоскости x1–z1 имеет вид |
|
ρ |
1 |
2 |
l1,2 |
||||||
|
|
|
|
|
|
|
Y1 |
|
|||
|
x − x1 |
|
= |
z − z1 |
. |
(4.20) |
|
|
Z1 |
||
|
|
h1 |
|
|
|||||||
|
|
|
|
|
|
||||||
|
x2 − x1 |
|
|
z2 − z1 |
|
|
h2 |
|
|||
|
|
|
|
3 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||
Уравнение данной прямой на |
|
|
|
|
|||||||
плоскости можно также записать в |
X1 |
|
|
|
|||||||
виде |
|
|
|
|
|
|
|
|
|||
|
A·x+B·z+C=0, |
(4.21) |
Рис. 4.9. Схема для определения |
||||||||
где |
|
|
|
|
|
уравнения линии грузового каната |
|||||
A=1/(x2–x1); B=–1/(z2–z1); |
(вид сверху на поворотную колонку) |
||||||||||
|
|
|
|
||||||||
C=z1/(z2–z1) – x1/(x2–x1). (4.22)
Расстояние от данной прямой до точки с нулевыми координатами (начало системы координат на рис. 4.9) определится как
185

h1 |
= |
|
|
C |
|
|
. |
(4.23) |
||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|||||
A2 |
+ B2 |
|||||||||
|
|
|
|
|
|
|||||
Зная координаты x1, z1 точки 1, можно определить ρ по формуле (4.16). В то же время по схеме (см. рис. 4.9) ρ2=h12+h22. Тогда
|
|
|
|
h = |
ρ 2 - h 2 . |
(4.24) |
|
2 |
1 |
|
|
По данной формуле может быть найдено численное значение h2 для точки 1.
Поскольку h2 – расстояние между проекциями двух точек 1 и 3, лежащими на прямой линии в пространстве, можно представить h2 как функцию от вертикальной координаты y:
h2=y·к+y0, |
(4.25) |
где к и y0 – некоторые постоянные.
Поскольку координаты точек 1 и 2 в системе координат базового шасси находятся по формулам (4.13), (4.14), коэффициент пропор-
циональности к может быть определен как |
|
к=l1,2/∆y1,2, |
(4.26) |
где l1,2 = 
 (Dx1,2 )2 + (Dz1,2 )2 ; ∆x1,2=│x1–x2│; ∆z1,2=│z1–z2│; ∆y1,2=│y1–
(Dx1,2 )2 + (Dz1,2 )2 ; ∆x1,2=│x1–x2│; ∆z1,2=│z1–z2│; ∆y1,2=│y1–
–y2│.
Подставив в уравнение (4.24) значение y1 как компоненты вектора R1,1 точки 1, определенного по (4.12), можно определить y0 как
y0=h2 –y1·к. |
(4.27) |
Формула (4.24) справедлива для любой точки на прямой гравитационной вертикали (для любых значений ρ и h2), поэтому может быть получена зависимость вертикальной координаты y от вылета ρ для конкретного расположения прямой в системе O1X1Y1Z1:
|
|
|
|
|
|
|
|
|
|
|
y × к + y |
0 |
= |
ρ 2 - h 2 , |
(4.28) |
||||||
|
|
|
|
|
|
1 |
|
|
|
|
отсюда |
|
|
|
|
|
|
|
|
|
|
y = ( |
|
|
|
|
) |
|
|
|||
ρ |
2 − h |
2 |
− y |
0 |
к . |
(4.29) |
||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
186 |
|
|
|
|
|
|
|
Или обратная зависимость: |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
ρ 2 = h 2 |
+ (y × к + y |
0 |
)2 . |
|
|
(4.30) |
|||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
Границы области возможных положений оголовка стрелы в ко- |
|||||||||||||||||
ординатах «вылет–высота» (ρ–y) будут заданы следующими уравне- |
|||||||||||||||||
ниями (см. рис. 4.3): |
|
|
|
|
|
|
|
|
|
|
|
||||||
· |
линия 1: |
|
|
|
|
|
|
|
y=к1·ρ+y01; |
|
|
|
(4.31) |
||||
· |
линия 2: |
|
|
|
|
|
|
|
y=к2·ρ+y02; |
|
|
|
(4.32) |
||||
· |
линия 3: |
|
|
|
|
|
|
|
(ρ–c1)2+y2=(R3)2; |
|
|
(4.33) |
|||||
· |
линия 4: |
|
|
|
|
|
|
|
(ρ–c1)2+y2=(R4)2, |
|
|
(4.34) |
|||||
где к1, к2, y01, y02, R3, R4, – конструктивно заданные постоянные. |
|
||||||||||||||||
Для их определения воспользу- |
|
|
|
|
q9 |
c3 |
|||||||||||
емся схемой на рис. 4.10. Согласно |
Y1 |
|
|||||||||||||||
|
|
|
|||||||||||||||
этой схеме, по теореме синусов, |
|
|
|
c2 |
y01 |
q8 |
y |
||||||||||
c3 |
|
|
|
yc1 |
|
|
|
c3 |
|
c1 |
|
yc2 |
ρ |
||||
|
= |
|
|
; yc1 = |
|
; |
yc1 |
ρ |
|
||||||||
sin(90° - q8 ) |
sin 90° |
|
|
|
|
|
|
||||||||||
c1 |
yc2 ; |
cosq8 |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
= |
|
|
|
|
|
q8 |
zc1 |
c3 |
|
||
|
sin(90° - q8 ) |
|
sin q8 |
|
|
|
|
|
q8 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
||||||||
yc2 = c1 × tg(q8 ); |
|
yc2=yc1+y01; |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
(90°–q8) |
|
||||||||||
y01 = c1 |
× tg(q8min )- |
|
|
|
c3 |
; |
(4.35) |
|
|
|
|
|
|
||||
cos(q8min ) |
Рис. 4.10. Схема для определения |
||||||||||||||||
y02 = c1 |
× tg(q8max )- |
|
|
|
c3 |
|
. (4.36) |
постоянных к1, к2, y01, y02, R3, R4 |
|||||||||
|
cos(q8max ) |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
к1=tg(q8min); |
|
|
|
|
(4.37) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
к2=tg(q8max); |
|
|
|
|
(4.38) |
||
|
|
|
|
|
|
|
|
R3 = |
|
(c2 + q9min )2 + (c3 )2 ; |
|
|
(4.39) |
||||
|
|
|
|
|
|
|
|
R4 = |
|
(c2 + q9max )2 + (c3 )2 . |
|
|
(4.40) |
||||
После определения коэффициентов уравнений (4.31)–(4.34) необ- |
|||||||||||||||||
ходимо решить четыре системы уравнений: (4.30)–(4.31), (4.30)– |
|||||||||||||||||
(4.32), (4.30)–(4.33) и (4.30)–(4.34). |
|
|
|
|
|
|
|||||||||||
Решения систем уравнений (4.30)–(4.31) и (4.30)–(4.32) имеют |
|||||||||||||||||
вид соответственно |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
187
|
|
|
|
æ |
к × y |
0 |
× к + к2 × к × y |
01 |
± |
ö |
|
|
|||||||||||||||
|
|
|
|
ç |
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|
÷ |
|
|
||||
|
|
|
|
ç |
|
|
- к × к |
2 |
× h |
2 |
|
+ h |
2 |
+ |
÷ |
|
|
||||||||||
|
|
|
|
ç |
|
|
|
|
|
|
1 |
|
|
|
1 |
|
|
1 |
|
|
÷ |
|
|
||||
|
|
|
- |
к1 ×ç |
± + 2 × к × y0 × y01 + |
|
|
|
÷ |
|
|
||||||||||||||||
|
|
|
|
ç |
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
2 |
|
|
|
÷ |
|
|
|||
|
|
|
|
ç |
|
|
|
|
|
+ |
к |
× y01 |
|
|
|
÷ |
|
|
|||||||||
|
|
|
y = |
è |
|
|
+ y0 |
|
|
|
|
|
|
|
ø + y01 ; |
|
|||||||||||
|
|
|
|
|
(к2 × к |
2 |
-1) |
|
|
|
|
|
|
(4.41) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
æ |
к × y |
0 |
× к |
2 |
+ к2 × к |
2 |
× y |
02 |
±ö |
|
|
|
|
|
||||||||||
|
|
|
ç |
|
|
|
|
|
|
|
|
|
|
|
÷ |
|
|
|
|
|
|||||||
|
|
|
ç |
- к × к |
2 |
2 × h 2 |
+ h |
2 + ÷ |
|
|
|
|
|
||||||||||||||
|
|
|
- к2 ×ç |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
÷ |
|
|
|
|
|
||
|
|
|
± + 2 × к × y0 × y02 + |
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
ç |
|
|
|
÷ |
|
|
|
|
|
|||||||||||||||
|
|
|
ç |
|
|
|
|
2 |
|
|
2 |
|
|
|
|
|
2 |
|
|
|
÷ |
|
|
|
|
|
|
|
|
|
ç |
+ y0 |
+ к |
× y02 |
|
|
|
÷ |
|
|
|
|
|
||||||||||||
|
|
y = |
è |
|
|
|
|
|
|
|
ø + y02 . |
|
(4.42) |
||||||||||||||
|
|
(к2 × к2 |
2 -1) |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Причем используются только положительные значения y, кото- |
|||||||||||||||||||||||||||
рым, как показали расчеты, соответствует знак «+» перед квадратным |
|||||||||||||||||||||||||||
корнем. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Системы уравнений (4.30)–(4.33) и (4.30)–(4.34) могут быть све- |
|||||||||||||||||||||||||||
дены к уравнению с одним неизвестным четвертой степени, которое, |
|||||||||||||||||||||||||||
как отмечалось, гораздо легче решить численно, чем аналитически. |
|||||||||||||||||||||||||||
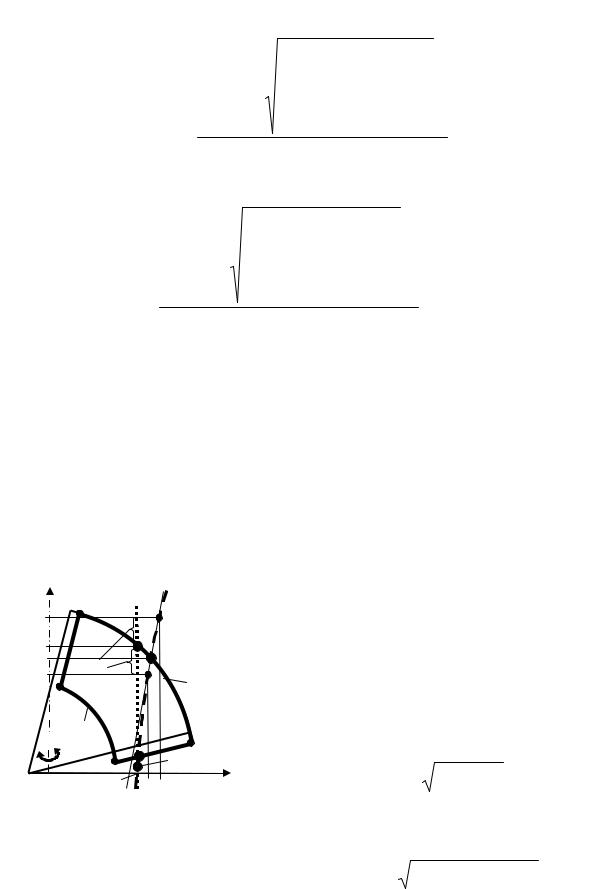
Однако можно обойтись и без численных методов, если провести |
|||||||||||||||||||||||||||
линеаризацию кривой грузового каната в координатах (ρ–Y1), описы- |
|||||||||||||||||||||||||||
ваемой уравнением (4.30), в окрестностях ее пересечения с заданной |
|||||||||||||||||||||||||||
дугой 4 (или 3) окружности (рис. 4.11). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Y1 |
ρ0=const |
|
|
|
|
|
|
|
|
Линеаризация |
|
для |
пересечения |
||||||||||||||
yв |
|
|
|
|
|
|
линии грузового каната с дугой 4 |
||||||||||||||||||||
y4 |
|
|
|
|
|
|
включает |
|
|
предварительное |
определе- |
||||||||||||||||
yд4 |
cy |
|
|
|
|
|
ние вертикальной координаты y4 (см. |
||||||||||||||||||||
yн |
|
|
4 |
|
|
|
рис. 4.11) пересечения вертикальной |
||||||||||||||||||||
|
3 |
|
|
|
|
|
прямой линии вылета ρ0=const точки 1 |
||||||||||||||||||||
|
|
|
|
|
|
подвеса груза с координатами x1, z1 |
|||||||||||||||||||||
|
|
|
Точка 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ρ0 = |
|
x12 + z12 , |
(4.43) |
|||||
|
ρ0 |
ρн |
ρв |
ρ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Рис. 4.11. Схема линеаризации |
|
|
и |
|
дуги |
|
4, |
|
описываемой |
уравнением |
|||||||||||||||||
уравнения грузового каната |
|
|
(4.34) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
для пересечения с дугой 4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 - (ρ0 - c1 )2 . (4.44) |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
y4 = |
|
R4 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
188

Действительное значение yд4 вертикальной координаты точки пе- |
||||||||
ресечения линии грузового каната и дуги 4 будет отличаться от y4, ес- |
||||||||
ли имеются ненулевые углы наклона базового шасси относительно |
||||||||
гравитационной вертикали. |
|
|
|
|
|
|||
Необходимо определить значения вылета ρ двух точек на линии |
||||||||
грузового каната с вертикальными координатами, большими и |
||||||||
меньшими y4 на некоторую постоянную величину cy (см. рис. 4.11). |
||||||||
Значение cy будет определяться конструкцией ГПК (типоразмером) |
||||||||
и должно быть подобрано таким образом, чтобы для любых коор- |
||||||||
динат точки груза при любых допустимых углах наклона базового |
||||||||
шасси точка пересечения yд4 линии грузового каната и дуги окруж- |
||||||||
ности 4 оказалась внутри интервала [(y4+cy) |
(y4–cy)]. |
|
|
|||||
Это означает, что cy должно |
|
|
|
|
||||
быть |
больше |
определенного |
|
|
cy |
q8 |
||
минимально допустимого |
зна- |
Касательная |
yc |
h |
||||
чения. |
|
|
|
|
||||
Для приближенного вычис- |
|
|
|
|
||||
ления |
минимально возможного |
|
|
|
|
|||
значения cy используется схема, |
q8 |
|
|
αc |
||||
изображенная на рис. 4.12. |
|
|
|
|
|
|||
Согласно |
этой |
схеме |
R4 |
y0z |
|
|
||
tg(q8)=h/cy; |
αc=h/yc; |
|
|
|||||
|
|
|
|
|||||
yc=sin(q8 )× R4 + y0z , отсюда |
|
Рис. 4.12. Схема для приближенного |
||||||
|
α |
|
|
|
||||
|
)×(sin(q8) |
×R4 + y0z ), (4.45) |
определения минимального |
|||||
cy = tg(qc |
|
значения cy |
|
|||||
|
8 |
|
|
|
|
|
|
|
где αc – максимальный суммарный угол наклона базового шасси от- |
||||||||
носительно гравитационной вертикали. |
|
|
|
|||||
Так, например, если принять αc=3°=0,05236 рад, то для конструк- |
||||||||
ции ГПК с R4=20 м и y0y=3 м при варьировании q8 от 10 до 80° мини- |
||||||||
мально допустимое значение cy будет равно 1,92 м. В данном случае |
||||||||
целесообразно принять cy=2 м. |
|
|
|
|
||||
При обозначении |
|
|
|
|
|
|||
yв=y4+cy; yн=y4–cy. |
(4.46) |
Согласно (4.30) ρ определится как
ρ = |
|
. |
|
h12 + (y × к + y0 )2 |
(4.47) |
||
189 |
|
|
|