Материал: 2426
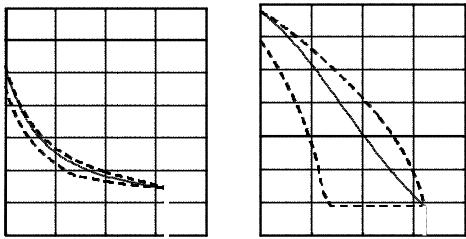
Рис. 4.15. Временные зависимости действительных (––) и диапазонных (- - -) значений управляемых координат q7, q8, q9, q10 для случая задания q8
Далее, располагая значениями xгр,yгр,zгр, по формулам (4.62), (4.65), (4.66) определяются значения q9, q8, q10. Все они гарантированно попадают внутрь соответствующих им диапазонов.
Задана координата q8.
По (4.35) определяется y01 с подстановкой заданного q8 вместо q8min. Затем по (4.37) с аналогичной подстановкой определяется к1.
После этого по формуле (4.41) может быть найдено y. По формулам (4.57), (4.58), зная y, можно определить значения x и z.
Затем необходимо подсчитать ρ по (4.47) или по (4.16), а далее использовать формулы (4.59), (4.62) и (4.66) для нахождения q7, q9 и q10 соответственно.
q7, |
|
|
|
|
рад |
|
|
|
|
1.2 |
|
|
|
|
1 |
|
|
|
|
0.8 |
|
|
|
|
0.6 |
|
|
|
|
0.4 |
|
|
|
|
0.2 |
|
|
|
|
0 |
10 |
20 |
t, c |
40 |
q8, |
|
|
|
|
рад |
|
|
|
|
1.2 |
|
|
|
|
1 |
|
|
|
|
0.8 |
|
|
|
|
0.6 |
|
|
|
|
0.4 |
|
|
|
|
0.2 |
|
|
|
|
0 |
10 |
20 |
t, c |
40 |
195
q9, |
|
|
|
|
|
|
|
q10, |
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
м |
|
|
|
|
8 |
|
|
|
|
|
|
|
15 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
5 |
|
|
|
|
0 |
5 |
10 |
15 |
20 |
25 |
t, c |
35 |
0 |
10 |
20 |
t, c |
40 |
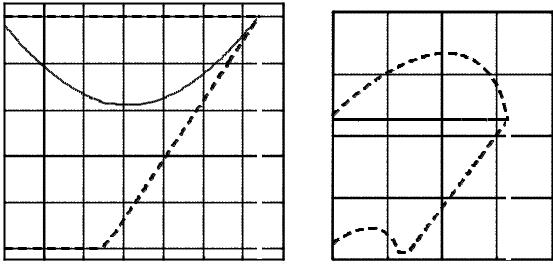
Рис. 4.16. Временные зависимости действительных (––) и диапазонных (- - -) |
||||||||||||
|
значений управляемых координат q7, q8, q9, q10 для случая задания q10 |
|
||||||||||
Задана координата q9.
Определяется R по формуле (4.60) (см. рис. 4.13) для заданного q9. Затем используется (4.44), в него подставляется найденное значение R и полученное ранее по формуле (4.43) значение ρ0 для точки 1 закрепления груза с известными координатами x1, z1. Определяется предварительное значение вертикальной координаты y4 (см. рис. 4.11).
Затем, располагая значением cy, полученным ранее по (4.45), находятся yв и yн по (4.46) и соответствующие им значения ρв и ρн по (4.47). Далее подсчитываются по (4.50) и (4.54) промежуточные параметры и коэффициенты, и по формуле (4.56) определяется значение y. По формулам (4.57), (4.58) при известном y могут быть определены значения x и z.
Затем необходимо подсчитать ρ по (4.47) или по (4.16), а далее использовать формулы (4.59), (4.65) и (4.66) для нахождения q7, q8 и q10 соответственно.
Задана координата q10.
По формуле (4.11) необходимо определить координаты точки 3 оголовка стрелы в инерциальной системе.
196
Задание исходных данных: координат точки подве- |
23 |
||
|
|||
са груза x1,0, y1,0, z1,0, координат шасси q1…q6, по- |
|
||
стоянных конструктивных и технологических па- |
|
||
раметров крана с1, с2, с3, z0z |
|
||
|
22 |
||
Определение координат точки 2 в инерциальной системе x2,0, y2,0, |
|||
z2,0 по формуле (4.12) |
|
|
|
|
|
21 |
|
Определение координат точек 1 и 2 x1, y1, z1 |
|||
|
|||
и x2, y2, z2 в системе базового шасси по (4.13) и (4.14) |
|
||
|
|
20 |
|
Определение вылета стрелы ρ по (4.16) |
|||
|
|||
|
19 |
||
Определение коэффициентов уравнения прямой в плоскости |
|||
A, B, C по (4.22) |
|
|
|
|
18 |
||
Определение расстояния h1 от прямой до оси вращения ко- |
|||
лонки по формуле (4.23) |
|
|
|
|
|
|
|
|
|
17 |
|
Определение к и y0 по формулам (4.26) и (4.27) |
|||
|
|||
|
16 |
||
Определение постоянных к1, к2, y01, y02, R3, R4 по (4.35)–(4.40) |
|||
|
15 |
||
|
|||
Определение от 2 до 4 действительных неотрицательных ре- |
|||
шений систем уравнений вида (4.30)–(4.31) и (4.30)–(4.32) по |
|
||
формулам (4.41), (4.42), (4.56) |
|
||
|
14 |
||
Определение управляемых координат q7, q8, q9, q10 по форму- |
|||
лам (4.59), (4.62), (4.65), (4.66) для каждого из найденных на |
|
||
предыдущей итерации алгоритма |
|
||
Пуск |
1 |
|
|
Проверка всех значений q7, q8, q9, q10 на попадание внутрь ин- 13 тервала конструктивно допустимых значений по (4.67)
1
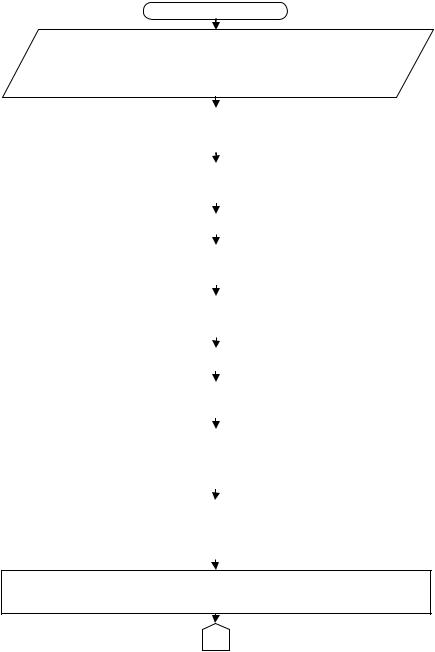
Рис. 4.17. Блок-схема алгоритма определения управляемых координат ГПК по координатам точки груза (начало)
197
85
84
83
82
81
80
79
78
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Нет |
|
|
|
|
|
|
|
|
|
|
|
|
90 |
|
|
|
|
Да |
||||
|
|
Имеются решения, удовле- |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
творяющие (4.67) |
89 |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вывод сообщения о невозможности |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
обеспечить требуемые координаты |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
груза |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
Останов |
|
|
88 |
|
|
|
|
|
|
|
87 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Да |
|
|
|
|
|
|
|
||
|
|
|
|
Нет |
|
|
Задается q7 |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
86 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Да |
|
Задается q8 |
|
Нет |
|
|
|
|
|
Опр-еx по(4.72) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Опр-е z по(4.70) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
Опр-е y01 по (4.35) |
|
|
|
|
|
|
|
|
|
|
Опр-еρ по(4.16) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
Опр-е к1 по (4.37) |
|
|
|
|
|
|
|
|
|
|
Опр-еy по(4.29) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
Опр-е y по (4.41) |
|
|
|
|
|
|
|
|
|
|
Опр-е q8 по(4.65) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
Опр-е x и z по (4.57), (4.58) |
|
|
|
|
|
|
|
Опр-е q9 по(4.62) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
Опр-е ρ по (4.47) |
|
|
|
|
|
|
|
|
|
Опр-е q10 по(4.66) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
||||
|
|
|
|
Опр-е q7 по (4.59) |
|
|
|
|
|
|
|
|
|
|
|
64 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
Опр-е q9 по (4.62) |
|
|
|
|
|
Нет |
|
Задается q9 |
|
Да |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
Опр-е q10 по (4.66) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
70 |
|
|
|
Опр-е R по (4.60) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Опр-еx3,0 y3,0 z3,0 по(4.11) |
|
|
|
|
|
Опр-е y4 по (4.44) |
|||||||||||||||
|
|
|
|
|
|
|
|
69 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
Опр-е x, z, y по (4.73) |
|
|
|
|
|
Опр-е yв |
и yн по (4.46) |
||||||||||||||
|
|
|
|
|
68 |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
Опр-е ρ по (4.47) |
|
|
|
|
|
Опр-е ρв |
и ρн по (4.47) |
|||||||||||||
|
|
|
|
|
|
67 |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
Опр-е q7 по (4.59) |
|
|
|
|
|
|
Опр-е y по (4.56) |
|||||||||||||
|
|
|
|
|
|
66 |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
Опр-е q8 по (4.65) |
|
|
|
|
|
|
Опр-е x и z по (4.57), (4.58) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
65 |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
Опр-е q9 по (4.62) |
|
|
|
|
|
|
Опр-е ρ по (4.47) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
53 |
|
|
|
Опр-е q7 по (4.59) |
||||||||||
|
|
Вывод q7В, q7Н, q8В, q8Н, q9В, q9Н, |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
Опр-е q8 по (4.65) |
|||||||||||||||||
|
|
|
|
q10В, q10Н, q7, q8, q9, q10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
Опр-е q10 по (4.66) |
|||||||||||||||
|
|
|
|
Останов |
52 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
77
76
75
74
73
72
71
63
62
61
60
59
58
57
56
55
54
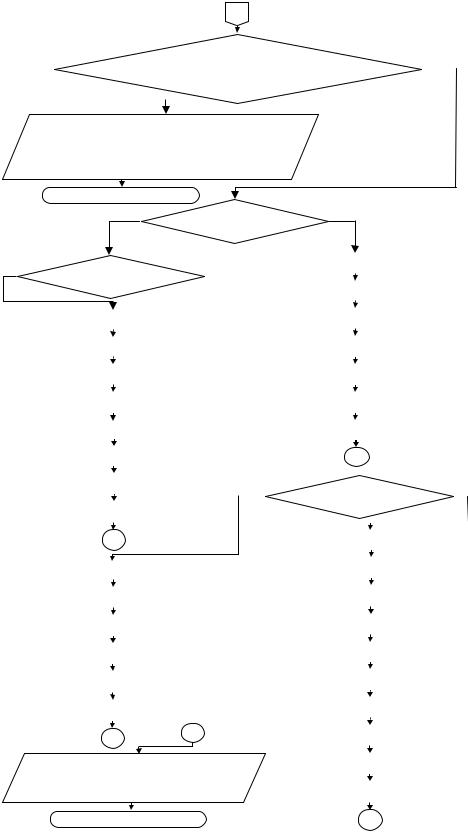
Рис. 4.17. Блок-схема алгоритма определения управляемых координат ГПК по координатам точки груза (окончание)
198
Тогда вектор точки 3 в системе O1X1Y1Z1 определится как
R |
= (T )−1 |
× R , |
(4.73) |
3,1 |
1 |
3,0 |
|
где R3,0 – вектор положения точки 3 в инерциальной системе коорди-
нат вида [x3,0 y3,0 z3,0 1], компоненты которого найдены по формуле
(4.11).
Врезультате будут получены координаты точки оголовка в системе базового шасси, которые обозначим как x, z, y.
Затем необходимо подсчитать ρ по (4.47) или по (4.16), а далее
использовать формулы (4.59), (4.65), (4.62) для нахождения q7, q8, q9 соответственно.
По данной методике была разработана имитационная модель и составлена компьютерная программа, испытание которой подтвердило адекватность предложенной методики.
Вкачестве примера, иллюстрирующего работоспособность методики, для заданного закона изменения обобщенных координат точки подвеса груза, приведенного на рис. 4.14, были получены временные зависимости верхних и нижних диапазонных значений управляемых
координат q7, q8, q9, q10 (изображены пунктирными линиями на рис. 4.15, 4.16).
Также в качестве примера были рассмотрены два варианта задания одной из четырех управляющих координат внутри своего диапа-
зона: угла подъема стрелы q8 на рис. 4.15 (случай равномерного прямолинейного уменьшения, т.е. опускания стрелы) и длины грузового
каната q10 на рис. 4.16 (постоянное значение).
Как видно из рис. 4.15 и 4.16, остальные управляемые координаты при этом также однозначно определялись внутри своих допустимых диапазонов.
На рис. 4.14 пунктирная линия показывает временное значение, при котором координаты точки подвеса груза выходят за пределы досягаемости, обеспечиваемые управляемыми обобщенными координатами ГПК. На рис. 4.15 и 4.16 верхнее и нижнее диапазонные значения всех управляемых координат в это же время одновременно сходятся в одну точку.
Блок-схема алгоритма описанной методики с использованием линеаризации приведена на рис. 4.17.
199