Материал: 2423
большинстве случаев практики их значения не известны. В этом случае определение координат точек местности по стереопаре снимков выполняют методом двойной обратной фотограмметрической засечки.
Решение задачи по этому методу выполняется в следующей последовательности:
1.Определяют элементы взаимного ориентирования снимков. Пять элементов взаимного ориентирования снимков определяют взаимную угловую ориентацию стереопары снимков и базиса фотографирования. Для их определения необходимо измерить не менее пяти соответственных точек на стереопаре снимков.
2.Строят фотограмметрическую модель объекта по измеренным на стереопаре снимков координатам изображений соответственных точек и значениям элементов взаимного ориентирования снимков. Построенная модель подобна сфотографированному объекту, но имеет произвольный масштаб и произвольно расположена и ориентирована относительно системы координат объекта.
3.Определяют элементы внешнего ориентирования фотограмметрической модели по опорным точкам. Эти семь элементов определяют масштаб модели, ее положение и ориентацию относительно системы координат объекта. Для их определения достаточно трех опорных точек, не лежащих на одной прямой. По значениям элементов внешнего ориентирования фотограмметрической модели и элементов взаимного ориентирования можно определить элементы внешнего ориентирования стереопары снимков.
4.По координатам точек, определенных в системе координат модели, и элементам внешнего ориентирования модели определяют координаты точек в системе координат объекта.
105
4.4. Условие, уравнения и элементы взаимного ориентирования снимков
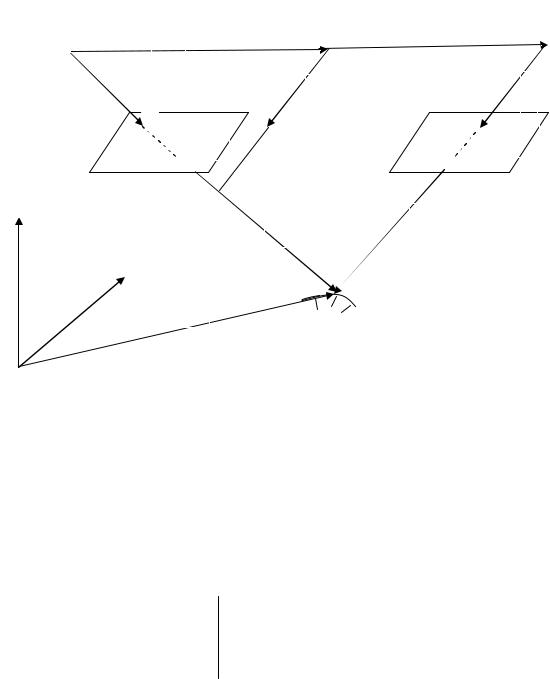
На рис. 4.2 представлена стереопара снимков Р1 и Р2 в положении, которое они занимали в момент фотографирования. Любая пара соответственных лучей в этом случае пересекается в точке М местности и лежит в плоскости, проходящей через базис фотографирования В (базисной плоскости).
b |
|
S2 |
В |
S2 |
S1 |
|
|
|
|
r1 |
r |
|
|
r2 |
2 |
|
|
|
|
|
|
|
|
|
P1 |
m2 |
|
m2 |
P2 |
m1 |
|
|
|
|
Z
R1 R2
Y
RМ M
 X
X
Рис. 4.2. Стереопара снимков в момент фотографирования
Очевидно, что в этом случае векторы В, r1 и r2 , лежащие в базисной плоскости, компланарны.
Как известно из аналитической геометрии, смешанное произведение компланарных векторов равно нулю.
В r |
r |
0. |
(4.19) |
1 |
2 |
|
|
Условие компланарности в координатной форме имеет вид:
BX |
BY |
BZ |
|
|
X1 |
Y1 |
Z1 |
0. |
(4.20) |
X2 |
Y2 |
Z2 |
|
|
106
В уравнении (4.20) BX , BY , BZ , X1,Y1, Z1 и X2 ,Y2 , Z2 координаты векторов В,r1 ,r2 в системе координат фотограмметрической модели ОМХМYMZM, в общем случае произвольно расположенной и ориентированной.
В дальнейшем эту систему координат будем называть просто системой координат модели.
Условие (4.20) связывает между собой только направления векторов и выполняется при любых значениях их модулей. Поэтому значение модуля вектора Вможно выбрать произвольно. Направление вектора Вопределяется двумя независимыми величинами. В качестве этих величин можно выбрать координаты bz и bу вектора b , коллинеарного вектору В, задав величину координаты bx произвольно.
В частном случае величину bx можно выбрать равной 1. При этом направление вектора Вбудут определять величины:
|
|
b |
BY |
|
и |
b |
|
BZ |
. |
|||||||
|
|
|||||||||||||||
B |
|
|||||||||||||||
|
|
|||||||||||||||
|
|
y |
|
|
|
|
|
|
|
Z |
|
B |
X |
|||
|
|
|
|
|
X |
|
|
|
|
|
|
|
|
|
||
Выражение (4.20) в этом случае будет иметь вид |
||||||||||||||||
|
|
1 |
bY |
|
|
bZ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
X1 |
Y1 |
|
Z1 |
|
|
0. |
|
|
(4.21) |
|||||
|
|
X2 |
Y2 |
|
Z2 |
|
|
|
|
|
|
|
|
|
||
В уравнении (4.21) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
X |
|
|
|
|
|
x |
|
x |
|
|||||
|
|
|
i |
|
|
|
|
|
|
i |
|
0i |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Yi |
Ai |
yi y0i , |
||||||||||||
|
|
|
Zi |
|
|
|
|
|
|
fi |
|
|||||
|
|
|
|
|
|
|
|
|
|
|||||||
где i – номер снимка, а А i – ортогональная матрица, элементы aij которой являются функциями угловых элементов ориентирования i-го снимка i’, i’, i’ относительно системы координат модели
ОМХМYMZM.
В выражении (4.21), которое является уравнением взаимного ориентирования в общем виде, куда кроме координат соответственных точек, измеренных на стереопаре снимков, и элементов внутреннего ориентирования входят 8 параметров by, bz, 1’, 1’, 1’, 2’, 2’,2’, которые определяют угловую ориентацию базиса фотографирования и стереопары снимков относительно системы координат модели ОМХМYMZM.
107

Причем параметры 1’ и 2’ определяют поворот снимков стерепары вокруг оси ХМ, параметры bz, 1’, 2‘ – поворот базиса фотографирования и стереопары снимков вокруг оси YM, а параметры by,1’, 2 ‘ – поворот базиса фотографирования и стереопары снимков вокруг оси ZM.
Однако, из этих 8-ми параметров только 5 определяют взаимную угловую ориентацию базиса фотографирования и стереопары снимков.
Условие (4.21) выполняется при любой ориентации системы координат модели ОМХМYMZM. Следовательно, ее можно ориентировать таким образом, чтобы 3 из 8 параметров стали равны нулю.
Очевидно, что в общем случае можно сделать равным нулю только один из параметров, входящих в три группы параметров:
–1 , 2 ;
–bz, 1 , 2 ;
–by, 1 , 2 .
Таким образом, в качестве элементов взаимного ориентирования можно выбрать любую комбинацию из восьми параметров by, bz, 1 ,1 , 1 , 2 , 2 , 2 , кроме комбинаций, в которые одновременно входят две тройки параметров bz, 1’, 2‘ и by, 1’, 2’, а также пара параметров 1’ и 2’.
Рассмотрим наиболее распространенные системы элементов взаимного ориентирования:
Система 1 , 1 , 2 , 2 , 2 . Если принять при этом, что by = bz = 1 = 0, то уравнение (4.21) имеет вид
1 |
|
0 |
0 |
|
|
|
|
|
X |
|
|
|
|
|
|
0. |
(4.22) |
1 |
Y1 |
Z1 |
Y1Z |
2 |
Y2Z1 |
|||
X2 |
Y2 |
Z2 |
|
|
|
|
|
|
Система by, bz, 2 , 2 , 2 . Если при этом принять, что1 = 1 = 1 = 0, то уравнение (3) будет иметь вид
|
|
1 |
|
by |
bz |
|
|
|
x1 x01 |
|
y1 y01 |
f1 |
0, |
(4.23) |
|
|
X2 |
|
Y2 |
Z2 |
|
|
|
|
1 |
0 |
0 |
|
|
|
|
|
|
1 |
0 |
|
|
|
|
так как A1 E 0 |
. |
|
|
|
|||
|
|
0 |
1 |
|
|
|
|
|
0 |
|
|
|
|
||
108

Комментарий. 3 оставшихся из 8-ми параметров после выбора 5-ти элементов взаимного ориентирования задают ориентацию системы координат модели ОМХМYMZM. Например, выбрав систему элементов взаимного ориентирования by, bz, 2 , 2 , 2 и приняв, что1 = 1 = 1 = 0, мы таким образом задаем систему координат модели ОМХМYMZM, которой параллельны осям x, y, z системы координат первого снимка стереопары S1x1y1z1. В общем случае значения трех параметров можно задавать произвольно.
4.5. Определение элементов взаимного ориентирования
Для определения элементов взаимного ориентирования в качестве исходного используют уравнения взаимного ориентирования
1 |
bY |
bZ |
|
|
X1 |
Y1 |
Z1 |
0. |
(4.21) |
X2 |
Y2 |
Z2 |
|
|
Каждая точка, измеренная на стереопаре снимков, позволяет составить одно уравнение (4.21), в которое, помимо измеренных координат точек на стереопаре снимков, элементов внутреннего ориентирования и трех параметров, задающих ориентацию системы координат модели, входят 5 неизвестных элементов взаимного ориентирования.
Очевидно, что для определения элементов взаимного ориентирования необходимо измерить на стереопаре снимков не менее 5 точек.
Вкачестве примера рассмотрим определение элементов взаимного ориентирования by, bz, 2 , 2 , 2 .
Всвязи с тем, что уравнения ( 4.21) не линейны, их предварительно приводят к линейному виду и переходят к уравнению поправок:
a1 bz a2 by a3 2 a4 2 a5 2 . ( 4.24)
В уравнении поправок коэффициенты ai частные производные от функции (4.21) по соответствующим аргументам, а ℓ– свободный член.
Значения коэффициентов аi в уравнении (4.24) вычисляют по следующим известным значениям:
измереннымкоординатамточекнастереопареснимков–хi,yi;
элементам внутреннего ориентирования снимков fi, x0i, y0i;
109