Материал: 2423
лельных основанию картины, будут также параллельны основанию картины. Для их отыскания построим проекции диагоналей сетки.
Для нахождения направлений перспектив проекций диагоналей сетки соединим точки пересечения диагоналей с основанием картины (точки k1,…, k6) c точками схода их проекций (i1, i2), полученными в пересечении линии действительного горизонта с прямыми, проведенных из центра проекции S параллельно диагоналям сетки.
Для отыскания направления перспективы проекций прямых, параллельных основанию картины, соединим соответствующие точки пересечения направлений перспектив диагоналей сетки (i1k6, i2k1) и ее сторон, параллельных проекции главной вертикали (ik1, ik2, ik3, ivo, …, ik6).
Анализ полученной перспективы позволяет сделать некоторые общие выводы об изменении масштаба изображения и наличии перспективных искажений, в частности:
1.При перемещении вдоль главной вертикали от основания картины к главной точке схода картинной плоскости линейные размеры проекций сторон сетки уменьшаются, и в точке i становятся равными нулю. Следовательно, масштаб их изображения изменяется от единицы на основании картины до нуля в главной точке схода.
2.Масштаб изображения по направлениям, совпадающим с горизонталями, остается неизменным. В этом можно убедиться, рассмотрев подобные треугольники с общей вершиной в точке i.
3.Преобразование сетки квадратов предметной плоскости в сетку трапеций в картинной плоскости позволяет говорить о наличии угловых и линейных искажений.
Контрольные вопросы
1.Что понимается под элементами центральной проекции?
2.Поясните термины негативная и позитивная плоскости?
3.Какое свойство у точки нулевых искажений?
4.Как изменяется масштаб изображения из-за угла наклона вдоль линии главной вертикали?
5.Какой масштаб по горизонтали (то есть линии перпендикулярной главной вертикали)?
6.Каким образом определяются угловые искажения по построенной перспективе сетки квадратов?
7.В какой точке пересекаются продолжения перспектив вертикальных объектов?
80
Глава 3. ТЕОРИЯ ОДИНОЧНОГО СНИМКА |
|
|
|||||||||||||||||
|
3.1. Системы координат снимка. |
|
|
|
|||||||||||||||
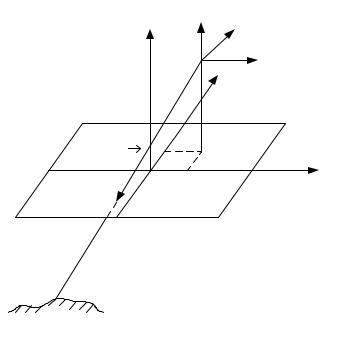
Элементы внутреннего ориентирования снимка |
|
|
|||||||||||||||||
На каждом снимке имеются изображения |
|
координатных меток, |
|||||||||||||||||
которые определяют |
правую |
прямоугольную |
систему координат |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
снимка o’xyz. |
|
|
|
||||
|
z |
|
|
z |
|
|
y |
|
|
|
|
Ось |
х |
этой |
системы |
||||
|
|
|
|
|
|
|
|
|
|
|
проходит |
через координат- |
|||||||
|
|
|
|
S |
|
|
x |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
ные метки 1-2 и направлена |
|||||||||
|
|
|
|
. |
y |
|
|
|
|
|
|
||||||||
|
|
|
|
f |
|
|
|
|
|
|
приблизительно по |
направ- |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
лению полета. Началом сис- |
|||||||
|
r . |
|
|
.o |
|
|
Р |
|
|
|
|
темы |
|
|
координат |
является |
|||
|
|
x0 |
|
|
|
x |
|
точка |
|
о’, |
получаемая |
в ре- |
|||||||
|
|
y0 |
|
|
|
|
|
|
|||||||||||
|
o' |
|
|
|
|
|
|
|
|
|
зультате пересечения оси х с |
||||||||
m |
|
|
|
|
|
|
|
|
|
|
|
линией |
проведенной |
через |
|||||
. |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
координатные метки 3 и 4. |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
Ось y лежит в плоскости |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
снимка Р и перпендикулярна |
|||||||
M |
|
|
|
|
|
|
|
|
|
|
|
оси х. Ось z дополняет сис- |
|||||||
Рис. 3.1. Элементы внутреннего |
|
|
|
|
тему до правой. |
|
|
||||||||||||
|
|
|
|
Любая |
точка |
снимка, |
|||||||||||||
ориентирования снимка |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
например m, имеет в этой |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
системе координат координаты m(х, у, z = 0). Центр проекции S имеет |
|||||||||||||||||||
в этой системе координаты S ( x = x0, y = y0, z = f ), где f – фокусное |
|||||||||||||||||||
расстояние снимка, а х0 и у0 – координаты главной точки снимка – О. |
|||||||||||||||||||
Для восстановления связки проектирующих лучей, сформиро- |
|||||||||||||||||||
вавших снимок в системе координат снимка |
o’xyz, необходимо для |
||||||||||||||||||
каждой точки снимка определить координаты вектора Sm r |
в этой |
||||||||||||||||||
системе координат по измеренным на снимке координатам точки |
|||||||||||||||||||
m. |
x |
|
|
x |
|
|
x |
|
x |
|
|
x x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
r |
|
m |
|
|
s |
|
|
|
|
0 |
|
|
|
0 |
|
|
|
|
(3.1) |
ym |
ys |
|
y |
y0 |
y y0 |
. |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
f |
|
|
|
|
|
|
|
zm |
|
zs |
|
0 |
|
f |
|
|
|
|
|
|
|
|
||||
Из выражения |
(3.1) |
следует , что для восстановления связки |
|||||||||||||||||
проектирующих лучей, необходимо измерить ординаты точки и знать |
|||||||||||||||||||
81
значения координат центра проекции S в системе координат снимка снимка f , х0 , y0, которые являются постоянными для данного снимка и называются элементами внутреннего ориентирования снимка.
Более широко в фотограмметрии используют систему координат снимка Sxyz , началом которой является центр проекции S , а оси координат параллельны соответствующим осям системы координат o’xyz.
Так как система координат Sxyz параллельна системе координат o’xyz ,то, как известно из аналитической геометрии, координаты векторов в обеих системах координат равны, то есть координаты вектора r в системе координат Sxyz определяется выражением (3.1).
3.2. Системы координат объекта. Элементы внешнего ориентирования снимка
Положение точек объекта (местности) по снимкам определяют в прямоугольной пространственной системе координат OXYZ . В зависимости от решаемой задачи в качестве этой системы координат используют:
-государственную картографическую систему координат (в России – Гаусса – Крюгера);
-геоцентрическую систему координат;
-произвольную систему координат, связанную с характерными точками объекта (местности).
Положение и ориентацию системы координат снимка (или, что то же самое – снимка) в системе координат объекта OXYZ определя-
ют элементы внешнего ориентирования снимка.
Положение центра проекции S в системе координат объекта определяют его координаты Xs,Ys,Zs.
Угловая ориентация системы координат снимка относительно системы координат объекта определяется ортогональной матрицей:
a11 |
a12 |
a13 |
|
cosXx |
cosXy |
cosXz |
|
|
a22 |
|
|
|
cosYy |
|
(3.2) |
A a21 |
a23 |
cosYx |
cosYz |
||||
|
a32 |
|
|
|
cosZy |
|
|
a31 |
a33 |
cosZx |
cosZz |
|
|||
В матрице А элементы (направляющие косинусы) аij являются косинусами пространственных углов между осями координат системы координат объекта OXYZ и снимка Sxyz.
82
Направляющие косинусы являются координатами единичных векторов (ортов), совпадающих с осями координат снимка в системе координат объекта.
Вследствие особых характеристик ортогональной матрицы
А-1 = Ат ,
1 |
0 0 |
|
|
а ААт = Е = 0 |
1 |
0 . |
||
|
0 |
0 |
1 |
|
|
|
|||
В ортогональной матрице независимы только 3 элемента, следовательно, элементы матрицы являются функцией 3-х параметров. В качестве этих параметров в фотограмметрии используют 3 угла –, и , которые называют угловыми элементами внешнего ориентирования снимка.
Последовательно поворачивая систему координат объекта OXYZ на эти углы вокруг ее осей, можно ориентировать ее параллельно осям системы координат снимка. При этом последовательность и направление вращений могут быть произвольными. Поэтому в фотограмметрии используют различные системы угловых элементов ориентирования снимка.
Рассмотрим наиболее широко используемую систему, в которой система координат объекта OXYZ поворачивается последовательно против часовой стрелки (правые углы) вокруг осей X, Y и Z соответственно на углы , и .
Врезультате перемножения матриц
АА А А А А ,
получим значения элементов aij , как функции углов , и :
а11 |
cos cos |
|
|
|
a12 |
cos sin |
|
|
|
|
|
|||
a13 |
sin |
|
|
|
a21 |
sin sin cos cos sin |
|
|
|
|
|
|||
a |
22 |
sin sin sin cos cos . |
(3.3) |
|
|
|
|
|
|
a23 |
sin cos |
|
|
|
|
|
|||
a31 |
cos sin cos sin sin |
|
||
a32 |
cos sin sin sin cos |
|
|
|
|
|
|||
a33 |
cos cos |
|
|
|
|
|
|||
|
|
83 |
|
|
Если известны значения направляющих косинусов aij, то из выражений (3.3) можно получить значения углов , , .
|
a |
23 |
|
|
||
arctg |
|
|
|
|
||
|
|
|
||||
|
a33 |
|
|
|||
|
|
|
||||
arcsin a13 |
|
|
(3.4) |
|||
|
|
|||||
|
a |
12 |
|
|
|
|
arctg |
|
|
|
|
|
|
|
a |
|
|
|||
|
11 |
|
|
|
||
|
|
|
|
|
||
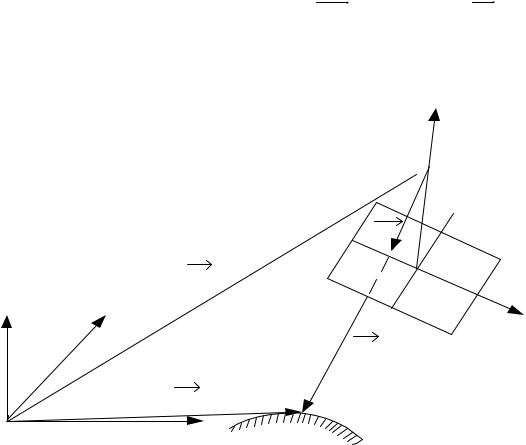
3.3. Формулы связи координат соответственных точек снимка и местности
Пусть из точки S получен снимок Р, на котором точка М местности изобразилась в точке m. Найдем зависимости между координатами этих точек. Положение точки М местности в системе координат
объекта OXYZ определяет вектор RM OM . Вектор RS OS определяет положение центра проекции S в системе координат объекта
OXYZ.
z
 ·S
·S
y 
|
|
|
r |
Z |
Rs |
|
m· ·o |
Y |
|
|
|
|
|
|
|
|
|
|
R |
O· |
RM |
· |
M |
X |
|
Рис. 3.2. Связь координат точек снимка и соответственных точек
местности
x
84