Материал: 2320
Гидроножницы легкой серии оснащаются механизмом свободного или гидравлического поворота, который позволяет эффективно выполнять работы в любых условиях.
|
|
|
|
|
А |
И |
||||
|
|
|
|
|
|
|
|
|||
|
|
|
б |
|
|
|
|
|
||
|
|
Рис. 1.26. Гидравлические ножницыДлегкой серии Delta C-200 |
||||||||
|
|
(l), мм ширина |
|
|
|
|
|
|
|
|
|
|
Технические характеристики гидроножниц легкой серии Delta |
||||||||
|
|
приведены в та л. 13. |
|
|
|
|
|
Таблица 13 |
||
|
|
Техн ческ е характер стики гидроножниц легкой серии Delta |
||||||||
|
|
Характер ст ка |
Delta C-100 |
Delta C- |
Delta C- |
Delta C- |
Delta MC- |
|
||
|
|
|
|
|
|
200 |
300 |
500 |
500 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Масса, кг |
|
105 |
180 |
330 |
400 |
400 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Макс мальная дл |
(Н), мм |
900 |
1105 |
1305 |
1425 |
1425 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Макс мальная ш р на (L), мм |
680 |
800 |
840 |
930 |
930 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Максимальная |
захвата |
280 |
360 |
430 |
530 |
530 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Разрушающее усилие (А), кН |
200 |
220 |
280 |
320 |
320 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Разрушающее усилие (В), кН |
300 |
320 |
390 |
480 |
480 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Режущее усилие (а), кН |
580 |
620 |
840 |
990 |
990 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Рабочее давление, бар |
210 |
210 |
210 |
210 |
210 |
|
||
|
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Масса экскаватора, т |
|
0,5-1,2 |
1,5-3,5 |
2-5 |
4-6,5 |
4-6,5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
31

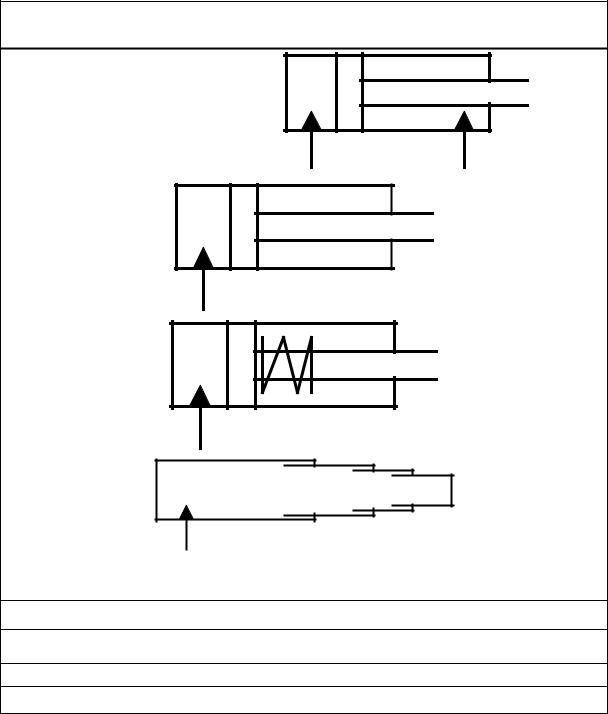
Различные гидроножницы показаны на рис. 1.27.
|
|
|
|
И |
|
|
|
Д |
|
|
|
А |
|
|
|
б |
|
|
|
и |
|
|
|
|
Р с. 1.27. Г дравл ческие ножницы различных типов |
||||
С |
|
|
|
|
32
1.5. Расчет гидроцилиндров
Исходные данные для расчета гидроцилиндра
Гидродвигатель возвратнопоступательного движения |
||
(гидроцилиндр) |
И |
|
|
||
Схема гидроцилиндра |
Д |
|
|
|
|
А |
|
|
Усилие |
|
|
би другие |
|
|
Ном нальное давление pном , МПа |
|
|
на штоке гидроцилиндра F, кН |
||
Скорость движения штока V, м/с |
|
|
Ход штока L , м |
|
|
Гидравлические цилиндры (силовые гидроцилиндры) предназна- |
||
Счены для преобразования энергии движущейся жидкости в механиче- |
||
скую энергию поступательного движения выходного звена.
33
Гидравлические цилиндры (гидроцилиндры) – это гидродвигатели с возвратно-поступательным движением выходного звена. Благодаря своей конструктивной простоте, возможности реализации значительных усилий, малой стоимости, высоким удельным показателям и на-
дежности гидроцилиндры являются самыми распространенными объ- |
|
емными гидродвигателями [1, 4, 9, 10, 17, 18]. |
И |
|
|
В зависимости от конструкции рабочей камеры гидроцилиндры подразделяются на поршневые, плунжерные, телескопические и
сильфонные. |
Д |
Наибольшее применение в объемных гидроприводах получили |
|
поршневые гидроцилиндры, в ч астности двустороннего действия с односторонним штоком.
Основными параметрами гидроцилиндров, определяющими их геометрические размеры иАвнешние характеристики, являются следующие: номинальное давление pном ; усилие на штоке, скорость перемещения штока, ход поршня L.
требуемый |
|
По этим параметрам определяются диаметр поршня (гильзы) D; |
|
диаметр штока d; |
расход жидкости для обеспечения за- |
данной скорости движения поршня со штоком.
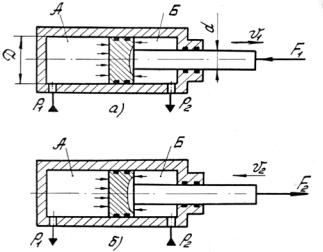
На рис. 1.28 показаны расчетные схемы гидроцилиндов. Теоретическое усилие, развиваемое гидроцилиндром (см. рис. 1.28, а) при вы-
талк ван |
одностороннего штока (жидкость поступает в поршневую |
||||||||
полость А) |
ез учета с л нерции, тяжести и трения, определяется из |
||||||||
услов |
я равновес я всех с л, действующих на шток, по формуле |
||||||||
|
|
|
|
|
|
F1 = p1S1 − p2S2 , |
|
(1.4) |
|
где |
F1 |
– |
|
на штоке, Н; p1 |
– давление в поршневой полости, Па; |
||||
S1 |
усилие |
|
площадь поршневой |
полости, м2; |
|||||
–- |
рабочая |
(эффективная) |
|||||||
S1 =πD2 / 4 ; |
|
p2 |
– давление в штоковой полости, |
Па; |
S2 – рабочая |
||||
(эффективная) площадь штоковой полости, м2, S2 = π |
(D2 −d 2 ). |
||||||||
С |
|
|
|
4 |
|
|
|||
|
|
|
|
|
|
||||
34
Следует заметить, что сила, действующая на выходное звено (рабочий орган), по величине равна силе F1, определяемой по формуле
(1.4), но противоположна ей по направлению.
Расчетная скорость движения штока (см. рис. 1.28, а) без учета
|
|
|
|
|
|
И |
||
утечек рабочей жидкости определяется из условия неразрывности по- |
||||||||
тока по формуле |
|
|
|
|
|
|
|
|
|
|
V = |
Qц |
, |
|
|
|
(1.5) |
|
|
1 |
S |
|
|
|
||
|
|
|
1 |
Д |
|
|||
где V1 – скорость движения штока, |
м/с; |
Qц – расход рабочей жидко- |
||||||
сти, м3/с; S1 – рабочая площадь поршневой полости, м2; |
S1 =πD2 / 4 . |
|||||||
При втягивании штока (см. рис. 1.28, б), когда жидкость подается |
||||||||
в штоковую полость Б, теоретическое усилие, развиваемое гидроци- |
||||||||
|
|
А |
|
|
|
|||
линдром, определяется по формуле |
|
|
|
|
|
|
||
|
|
F2 = p2S2 − p1S1 . |
|
|
(1.6) |
|||
|
б |
|
|
|
|
|
|
|
Расчетная скорость движения штока (см. рис. 1.28, б) определяет- |
||||||||
ся по формуле |
|
|
|
|
|
|
|
|
|
|
V2 = |
Qц |
. |
|
|
|
(1.7) |
и |
|
S2 |
|
|
|
|
|
|
Из формул (2) (4) видно, что V1 < V2 , так как S1 > S2 . |
|
|
||||||
С |
Рис. 1.28. Расчетные схемы гидроцилиндров: |
|
|
|||||
|
|
|
||||||
а – с поршневой рабочей полостью; б – со штоковой рабочей полостью
35