Материал: 2196
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
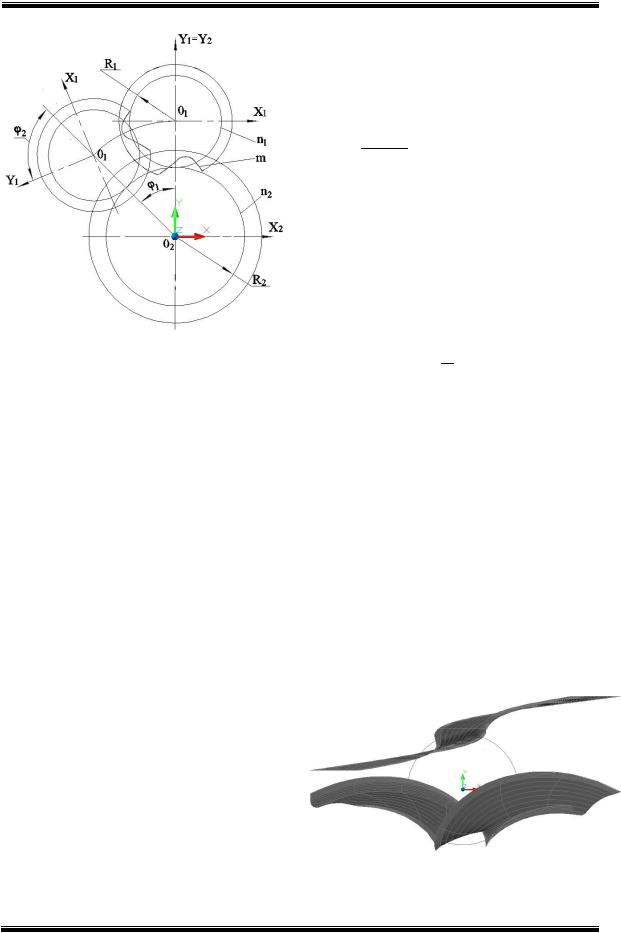
Рис. 1. Системы координат, связанные с профилями детали 01X1Y1 и инструмента R2 – радиус центроиды инструмента.
В относительном движении центроида n1 детали перекатывается без скольжения по центроиде n2 инструмента. В результате профиль m поворачивается вокруг неподвижной точки O2 на угол φ1 и вокруг подвижной точки O1 на угол φ2. Эти углы связаны зависимостью
1 |
|
R1 |
(2) |
|
2 |
R2 |
|||
|
|
Тогда уравнения перехода из системы координат 01X1Y1 в систему координат 02X2Y2 имеют вид
x2 x1 cos( 1 2) y1 sin( 1 2) |
|||||||||
A sin 1, |
|
|
|
|
|
|
(3) |
||
xr |
x |
sin( |
|
|
) y |
cos( |
|
|
|
2 |
2 |
) |
|||||||
vp |
1 |
1 |
|
1 |
1 |
|
|
||
A cos 1,
где A=R1 +R2.
Эти уравнения, совместно с уравнениями (1), задают семейство кривых в неподвижной системе координат. Такое семейство можно рассматривать как график отображения линий уровня некоторой поверхности Ψ на координатную плоскость X2Y2. Уравнения этой поверхности в параметрической форме, с учетом (2), можно представить так:
x x |
cosk |
y |
sin k |
A sin , |
|
2 |
1 |
1 |
1 |
1 |
1 |
y x |
sink |
y |
cosk |
A cos , (4) |
|
2 |
1 |
1 |
1 |
1 |
1 |
z2 p 1,
где k R1 R2 , а p – константа большая нуля.
R1
Запишем в системе координат 01X1Y1Z1 (ось Z1 совместно с осями X1 и Y1 образуют правую систему координат) уравнение цилиндрической винтовой поверхности (ЦВП) Ω, образованной винтовым движением кривой (1):
x x |
cos |
3 |
y |
sin |
, |
|
|
1 |
1 |
|
1 |
3 |
|
|
|
y x |
sin |
3 |
y |
cos |
, |
(5) |
|
1 |
1 |
|
1 |
3 |
|
|
|
z1 p1 3,
p
где 3 k 1, а p1 k .
Сравнивая системы уравнений (4) и (5), получим:
|
|
|
|
|
3 |
|
|
|||||
x |
2 |
x |
|
|
A sin |
|
|
, |
|
|||
|
|
|
|
|
|
|||||||
|
1 |
|
k |
|
|
|
||||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
3 |
|
|
|||
y |
2 |
y |
|
A cos |
|
|
, |
(6) |
||||
|
|
|
|
|||||||||
|
|
1 |
|
k |
|
|
|
|||||
|
|
|
|
|
|
|
||||||
z |
|
z |
. |
|
|
|
|
|
|
|
|
|
2 |
1 |
|
|
|
|
|
|
|
|
|
||
Рассматривая переход от ЦВП (Ω) к поверхности Ψ, как результат геометрического преобразования, нетрудно заметить, что система (6) описывает нелинейное преобразование. Эта система задает отображение поверхности Ω во вспомогательную поверхность
Ψ, которую назовем квазивинтовой поверхностью (КВП) (рисунок 2).
Рис. 2. Проекции модели квазивинтовой поверхности.
46 |
Вестник СибАДИ, выпуск 3 (21), 2011 |
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
В рассматриваемом преобразовании ось ЦВП отображается в цилиндрическую винтовую линию. Ее уравнение имеет вид
x2vl A sin 1, y2vl A cos 1, z2vl p 1.
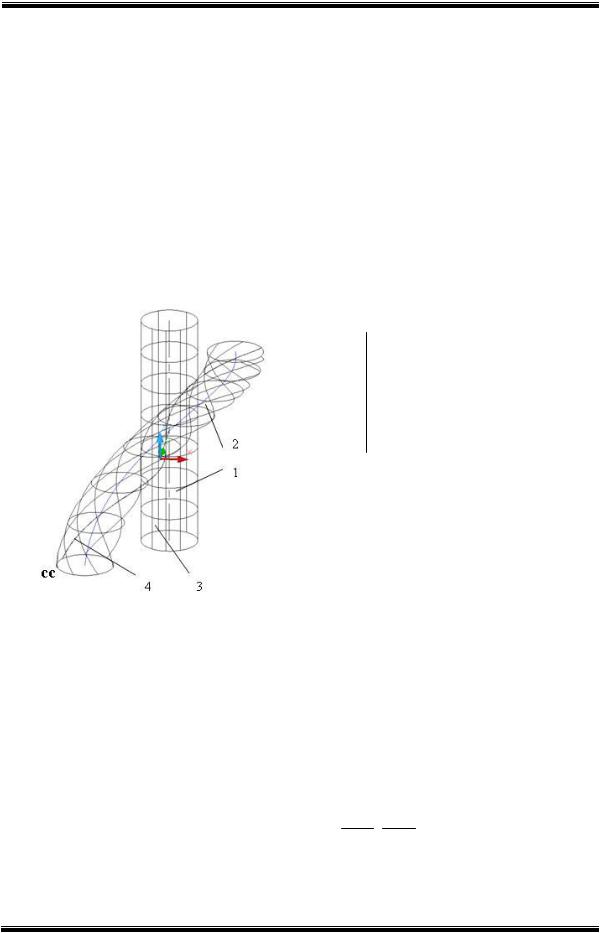
Цилиндрическая поверхность вращения с осью, совпадающей с осью ЦВП, отображается в трубчатую поверхность, у которой линией центров является упомянутая выше цилиндрическая винтовая линия, а плоскостью параллелизма – координатная плоскость X2Y2 (рисунок 3).
q
x22 R1 sink 1 A sin 1,
q
y22 R1 cosk 1 A cos 1.
Эти уравнения определяют эпициклоиду. Полученная КВП используется далее при
компьютерном формообразовании цилиндрической поверхности детали.
Как известно, касательная плоскость в точке (x0, y0, z0) поверхности, заданной параметрическими уравнениями:
x x(t, ),
y y(t, ), |
(7) |
Рис. 3. Отображение цилиндрической поверхности в трубчатую: 1 – цилиндрическая поверхность, 2 – трубчатая поверхность,
3 – ось цилиндрической поверхности,
4 – линия центров трубчатой поверхности.
Винтовые линии на ЦВП отображаются в квазивинтовые. Так точка A(0,-R1, 0), заданная в неподвижной системе координат, описывает на поверхности Ψ кривую q вида
x |
R |
sin k |
A sin , |
|
|
2 |
1 |
1 |
1 |
y |
R |
cos k |
A cos , |
|
|
2 |
1 |
1 |
1 |
z |
|
p . |
|
|
|
2 |
|
1 |
|
Ее проекция q2 на координатную плоскость X2Y2 определяется уравнениями
z z(t, ),
записывается в виде
X x0 |
Y y0 |
Z z0 |
|
|
|||||||||||
|
x2 |
|
|
|
|
y2 |
|
|
|
|
z2 |
|
|
0. |
(8) |
|
t |
t |
t |
||||||||||||
|
|
|
|
|
|
|
|||||||||
|
x2 |
|
|
|
y2 |
|
|
|
z2 |
|
|
|
|||
|
1 |
|
|
1 |
|
|
1 |
|
|
||||||
В точках контурной линии на поверхности относительно координатной плоскости X2Y2 касательная плоскость параллельна оси 02Z2. Тогда для этих точек выполняется соотношение
f (t, ) |
x2 |
|
y2 |
|
y2 |
|
x2 |
0. |
(9) |
|
|
t |
|
||||||
1 |
t |
|
|
|
|
||||
|
|
|
1 |
|
|
1 |
|
|
|
После вычисления частных производных, учитывая, что поверхность задана уравнениями (4), и подстановки в зависимость (9), получим
f (t, ) k x(t) |
x(t) |
k y(t) |
|
|||||||||||
|
|
|||||||||||||
|
1 |
|
|
|
|
|
|
t |
|
|
|
|
||
|
y(t) |
|
|
|
x(t) |
|
R2 |
|
|
|||||
|
A |
|
|
(10) |
||||||||||
|
t |
t |
|
sin( |
R |
1) |
||||||||
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
A |
y(t) |
cos( |
R2 |
) 0. |
|
|||||||||
|
R |
|
||||||||||||
|
|
|
|
t |
|
1 |
|
|
|
|
||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
||
где x(t), y(t) - частные производные по
t t
параметру t переменных из уравнений (1). Уравнение (10) устанавливает связь кри-
волинейных координат t и φ1, а совместно с уравнениями (4) выделяют контурную линию
Вестник СибАДИ, выпуск 3 (21), 2011 |
47 |
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
на КВП. При этом ортогональная проекция контурной линии на плоскость X2Y2 является очерком (локально) этой поверхности. Этот очерк можно рассматривать как особенность отображения ортогональным проецировани-
ем КВП на плоскость Z2 0 и, соответствен-
но, огибающей рассматриваемого семейства кривых. Полученная огибающая является торцовым профилем искомой цилиндрической поверхности инструмента.
Для установления возможных особых точек на очерке КВП (профиле ЦП) запишем уравнение касательной к контурной линии этой поверхности. Так как контурная линия
задается уравнениями (4) и (10), то уравнение касательной в точке (x0, y0, z0) будет иметь вид
X x0 Y y0 Z z0 , l m n
|
l |
x |
|
f (t, ) |
x |
|
f (t, ) |
||||||||||
где |
|
2 |
|
|
|
1 |
|
|
2 |
|
|
|
1 |
, |
|||
|
t |
1 |
|
1 |
|
t |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
m |
y |
|
f (t, ) |
|
y |
|
f (t, ) |
, |
|
||||||||
2 |
|
|
1 |
2 |
|
|
1 |
|
|
||||||||
t |
1 |
1 |
|
t |
|
|
|||||||||||
|
|
|
|
|
|
|
|
||||||||||
n |
z |
f (t, ) |
|
z |
f (t, ) |
|
|||||
2 |
|
1 |
|
|
2 |
|
1 |
, |
|||
|
|
1 |
|
t |
|||||||
|
t |
|
1 |
|
|||||||
причем |
|
f (t, 1) |
0. |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|||||
|
|
1 |
|
|
|
|
|
||||
После вычисления частных производных и подстановки в выражения для k, l и m, получим
|
|
|
|
|
x |
|
|
|
2 |
|
|
|
|
|
|
x 2x |
|
|
|
|
|
|
y 2 |
|
||||||||||||||||||||||
|
|
k |
|
|
|
|
1 |
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
t |
|
t2 |
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|||||||||||||||||||||||||
|
|
|
|
y |
|
|
|
|
|
2 |
y |
|
|
|
|
|
|
|
|
2 |
x |
|
|
|
|
R2 |
|
|
|
|||||||||||||||||
n p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|||||||||||||||||||||||
|
t |
|
|
|
|
|
|
|
|
|
|
|
t2 |
|
|
|
R |
|||||||||||||||||||||||||||||
k |
|
t2 |
|
A |
|
|
sin |
, |
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
2 |
y |
|
|
|
|
|
R2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
A |
|
|
t2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
cos |
R 1 |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
x |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
cosk cos |
|
|
2 |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
t |
|
|
|
R |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
||||
|
R |
|
|
x |
|
|
|
|
y |
|
|
|
2R R |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
l A |
|
2 |
|
|
|
|
|
1 |
|
|
|
|
1 |
sin |
|
2 |
|
|
|
|
1 |
|
|
|
|
|||||||||||||||||||||
R1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
t |
|
|
|
|
t |
|
|
|
|
|
|
|
R1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
y |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
sink sin |
|
|
|
2 |
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
t |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
R1 |
|
1 |
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
k x(t) sink 1 k y(t) cosk 1 A cos 1 G,
|
|
|
|
|
|
|
|
x |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin k |
cos |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R1 |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
m |
A |
R2 |
|
|
x1 |
|
|
y1 |
|
cos |
2R2 |
R1 |
|
|
|
|
|
|
||||||||||||||||||||||||
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
t |
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
1 |
|
|
|
|
||||||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
y |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
R |
2 |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
cosk |
sin |
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
R1 |
|
1 |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
k x(t) cosk 1 |
|
k y(t) sin k 1 A sin 1 G, |
||||||||||||||||||||||||||||||||||||||||
где: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
2x1 |
sin |
R2 |
|
|
2 y1 |
|
cos |
R2 |
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
R |
|
|
|||||||||||||||||||||||||||||||
|
|
|
t2 |
|
|
|
|
|
|
|
|
|
R |
|
1 |
|
|
|
t2 |
|
|
|
|
|
|
|
|
|
1 |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
x |
|
|
2 |
|
|
|
x |
|
2 |
x |
|
|
y |
|
|
|
2 |
y |
|
|
|
|||||||||||||||
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
t2 |
||||||||||||||||||||||||||
|
|
k |
t |
|
|
|
|
|
|
|
|
t |
t2 |
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Эти равенства используются для установления особых точек на очерке КВП и, соответственно, на профиле искомой ЦП. Так особые
точки на очерке КВП будут, если l m 0
или n=0.
Таким образом, полученные зависимости на основе ввода вспомогательной квазивинтовой поверхности, могут быть использованы при аналитическом профилировании цилиндрической поверхности инструмента, сопряженной с цилиндрической поверхностью детали.
Компьютерные модели вспомогательной поверхности
Описанные выше поверхности и их отображения реализованы средствами компьютерной графики. Для этого на первом этапе формируется модель квазивинтовой поверхности (рисунок 2). Для получения очерка КВП выполняется ее отображение на координатную плоскость X2Y2 (рисунок 4). Локальная окрестность этого очерка является торцовым профилем искомой поверхности инструмента. Однако для получения модели ЦП возникают определенные трудности в достижении необходимой точности ее профиля по полученной проекции. В связи с этим, модель квазивинтовой поверхности целесообразно использовать для визуализации процесса установления возможных особенностей на очерке КВП в зависимости от формы профиля детали, а также радиусов центроид изделия и инструмента.
48 |
Вестник СибАДИ, выпуск 3 (21), 2011 |
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
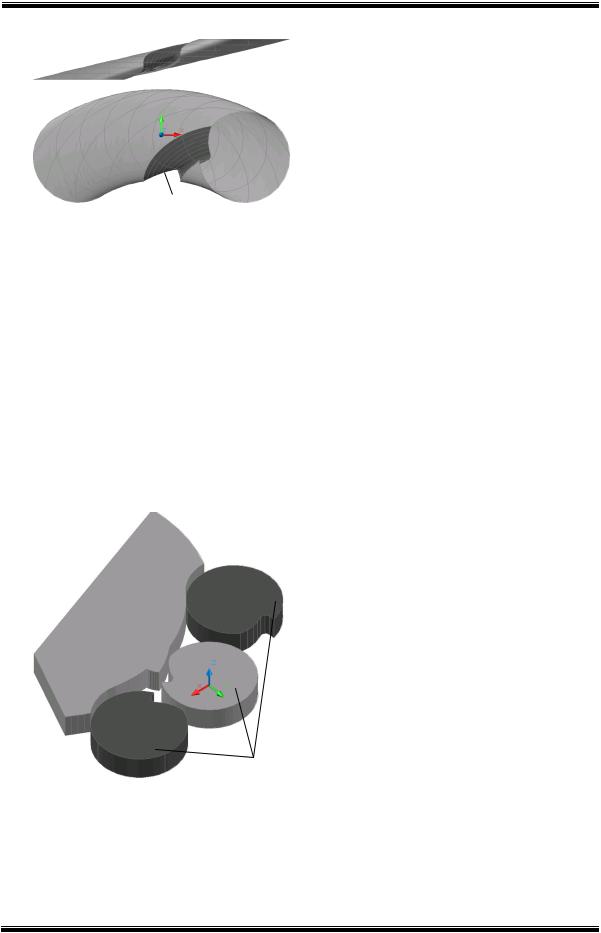
1
Рис. 4. Модели трубчатой и квазивинтовой поверхностей: 1 – очерк (локально) КВП
Для получения модели профиля цилиндрической поверхности с необходимой точностью целесообразно воспользоваться программой, моделирующей процесс формообразования профиля колеса по заданному профилю долбяка и наоборот [5] (рисунок 5). Полученный профиль используется для формирования цилиндрической поверхности детали, сопряженной с цилиндрической поверхностью долбяка.
Практическая реализация этапов создания рассмотренных моделей выполнена в виде подпрограмм, написанных на языке программирования AutoLISP в среде САПР AutoCAD.
 1
1
2
Рис. 5. Моделирование формообразования профиля инструмента по исходному профилю детали: 1 – фрагмент заготовки инструмента; 2 – модели изделия в процессе формообразования (для наглядности
они смещены по вертикали).
Выводы
На основании изложенного предлагаемая методика позволяет решать следующие задачи:
-формообразование цилиндрической поверхности инструмента по заданной поверхности детали и параметрам их взаимного расположения как аналитически, так и средствами компьютерной графики на основе введения вспомогательной квазивинтовой поверхности;
-целенаправленно, с использованием визуализации процесса формообразования, вносить изменения в форму профиля, как инструмента, так и изделия, а также корректировать параметры установки изделия относительно инструмента;
-решать обратную задачу формообразования как с целью проверки полученных результатов моделирования, так и для уточнения формы профиля детали при условии внесения конструктором корректировки в форму профиля инструмента.
Так как рассматриваемая кинематическая схема является не только самостоятельной, но и промежуточной, то данные результаты применимы для различных типов обкаточного инструмента.
Библиографический список
1.Лашнев С. И. Расчет и конструирование металлорежущих инструментов с применением ЭВМ. /С. И. Лашнев, М. И Юликов. – М.: Машиностроение, 1975. – 392 с.
2.Люкшин В.С. Теория винтовых поверхностей в проектировании режущих инструментов. – М.: Машиностроение, 1967. – 372 с.
3.Чемборисов Н. А. Обзор методов профилирования червячной фрезы для зубчатых венцов. / Н. А. Чемборисов, Т. Г. Девжеева // Металлообработка. – 2010. – № 4. – С. 2-6.
4.Моделирование формообразования сложных поверхностей деталей. / А. А. Ляшков [и др.] // Металлообработка. – 2010. – № 4. – С. 36-42.
5.Ляшков А.А. Программа компьютерного моделирования процесса формообразования зубчатых колес методом обкатки инструментальной рейкой и долбяком. / А. А. Ляшков. – М.: ВНТИЦ, 2008. – №50200802071.
SHAPING THE CYLINDRICAL SURFACE
OF A DETAIL
A.A. Lyashkov
A method of forming break-in tool, based on the transition from the plane problem of spatial. This approach involves the introduction of the auxiliary surface, the study of the geometric
Вестник СибАДИ, выпуск 3 (21), 2011 |
49 |

МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
characteristics which allows the influence of parameters of the wheel on the shape of the profile tool. The results obtained are enriching the picture forming surfaces, allow one to solve the problem by means of computer graphics, clear fashion-oscillating process of formation.
УДК 675.022:51-74
Ляшков Алексей Ануфриевич – кандидат технических наук, доцент кафедры "Начертательная геометрия, инженерная и компьютерная графика" Омского государственного технического университета. Основное направление научных исследований – геометрическое и компьютерное моделирование сложных поверхностей деталей. Общее количество публикаций - 85.
E- mail: 3dogibmod@mail.ru.
РАЗРАБОТКА МОДУЛЯ АВТОМАТИЗИРОВАННОГО ПРОЕКТИРОВАНИЯ ПОЛОТЕН ИЗ МАТРИЧНЫХ ЭЛЕМЕНТОВ ДЛЯ ИЗДЕЛИЙ ИЗ МЕХА И КОЖИ
Г.М. Андросова, И.Г. Браилов, О.В. Свириденко, О.И. Гнедова
Аннотация. Рассмотрены состав и структура информационного обеспечения автоматизированного проектирования полотен из матричных элементов. Разработаны модуль проектирования матричных элементов и полотен из них и база данных полотен для изделий из меха и кожи.
Ключевые слова: полотно, матричный элемент, проектирование.
Введение
Основными задачами, стоящими перед предприятиями швейной промышленности, являются удовлетворение потребностей населения в разнообразной одежде высокого качества, постоянное обновление и расширение ассортимента изделий. Одежда из меха в России пользуется неизменным спросом. Ее ассортимент динамично развивается. Сегодня рынок требует от производителей не только новых моделей, но и новых фактур материалов. Для этого необходимо использование новых технологий обработки, способов раскроя и изготовления, и соответственно новых способов проектирования. В настоящее время наблюдается тенденция поиска новых форм и объемов в одежде из меха, большое внимание уделяется оригинальности конструктивно-декоративных решений. Расширению модного ассортимента изделий из меха способствуют новые высококачественные технологии обработки используемых материалов, применение различных видов отделок, новых способов получения фактурных поверхностей, двухсторонних изделий, полотен из сочетания различных элементов. Добиться этого позволяет использование матричных элементов (МЭ), которые названы так потому, что их можно представить в виде матрицы, состоящей из следующих компонентов: основы
(I), областей соединения (II), декоративных (IV) и соединительных отверстий (III) (рису-
нок 1а) [1].
Способ получения полотен из МЭ представляет интерес благодаря выразительности создаваемых изделий. Широкий спектр видов поверхностей достигается за счет возможности получения разнообразных форм МЭ путем комбинирования структурных элементов, их образующих. Использование различных способов соединения МЭ и соединительных элементов позволяет получать новые структуры, а также создавать двухсторонние объемные ажурные полотна [2]. Кроме этого, изготавливаемые изделия относительно недорогие, поскольку можно использовать некондиционное сырье и отходы пушно-меховых полуфабрикатов и натуральных кожевенных материалов. Широкое применение данного способа обусловлено возможностью проектирования формы и размеров МЭ в соответствии с параметрами используемых материалов. Однако работы такого рода, связанные с проектированием МЭ и полотен из них, требуют больших затрат ручного труда и без привлечения информационных технологий их выполнить трудно. Это делает актуальными вопросы автоматизации проектирования полотен из МЭ и изделий из них.
50 |
Вестник СибАДИ, выпуск 3 (21), 2011 |