Материал: 1973
так и ее производной по продольной координате. Физический смысл этой производной – угол поворота поперечного сечения стержня.
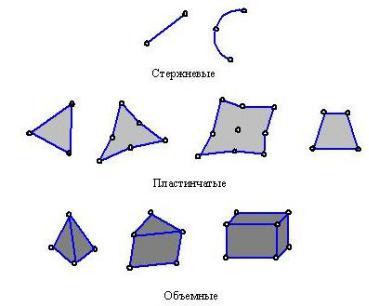
Рис. 4.1. Типы конечных элементов
Система узловых сил полностью соответствует степеням свободы элемента и выражается с помощью глобального вектора узловых сил.
Для конечных элементов, используемых в механических расчетах, определяющее соотношение задает поведение материала, из которого изготовлена конструкция. Например, в качестве такого соотношения во многих случаях используется обобщенный закон Гука, связывающий деформации и напряжения в точке. Для линейного упругого стержневого элемента достаточно задать один модуль Юнга Å
иодин коэффициент температурного расширения .
z z / E.
Ксвойствам сечения относятся площади и моменты инерции одномерных и двумерных конечных элементов, таких как балки, стержни, пластины. В эту группу также входит толщина пластин и оболочек. При построении конечного элемента свойства сечений считаются заданными и входят в результирующую матрицу жесткости элемента.
66
4.4. Сборка
Сборка представляет собой объединение отдельных элементов в конечно-элементную сетку [9]. С математической точки зрения сборка состоит в объединении матриц жесткости отдельных элементов в одну глобальную матрицу жесткости всей конструкции. При этом используются две системы нумерации узлов элементов: локальная и глобальная. Локальная нумерация представляет собой фиксированную нумерацию узлов для каждого типа конечных элементов в соответствии с введенной локальной системой координат на элементе. Глобальная нумерация узлов всей конструкции может быть совершенно произвольной, также как и глобальная нумерация конечных элементов. Однако между локальными и глобальными номерами узлов существует взаимно-однозначное соответствие, на основе которого и формируется глобальная система конечно-элементных уравнений.
4.5. Стержневой конечный элемент. Матрица жесткости конечного элемента
Рассмотрим произвольный конечный элемент с числом степеней
свободы nст .
Вектором узловых перемещений конечного элемента называется вектор, складывающийся из значений перемещений его узлов по направлению всех его степеней свободы [9]. Размерность вектора узловых перемещений равна числу степеней свободы элемента nст .
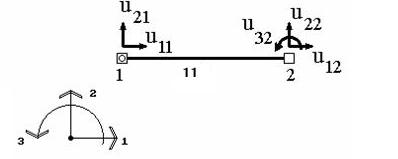
Рис. 4.2. Двухузловой стержневой конечный элемент
Например, для двухузлового элемента, имеющего в конечноэлементной схеме номер 11, характеризующегося тремя степенями свободы (рис. 4.2), вектор узловых перемещений будет иметь вид [9]
67
|
|
|
u11 |
|
|
|
|
|
|
|
|
|
u21 |
|
|
(11) |
|
|
|
U |
|
u12 |
. |
|
|
|
|
u22 |
|
|
|
|
|
|
|
|
|
u32 |
|
Здесь введены следующие обозначения: u jk перемещение узла
k по направлению j , U (e) вектор узловых перемещений узла e . Понятно, что если узел k шарнирный, то j может быть равно 1 или 2. Если же узел k жесткий, то j может быть равно 1, 2 или 3.
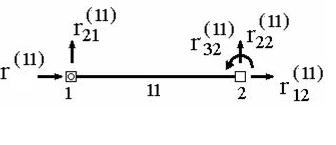
Аналогично вводится вектор узловых усилий, действующих на элемент. Его компонентами являются усилия, приложенные к элементу в узлах и действующие по направлению всех его степеней свободы. Для приведенного на рис.4.2 элемента этот вектор будет иметь вид
(рис. 4.3) [9]
r (11) |
|
11 |
|
r (11) |
|
21 |
. |
R (11) r (11) |
|
12 |
|
r (11) |
|
22(11) |
|
r32 |
|
Рис. 4.3. Векторы узловых усилий
Здесь вводятся обозначения rjk(e) усилие, действующее на узел k элемента e по направлению j , R (e) вектор узловых сил, дейст-
вующих на элемент e .
В рамках гипотезы линейного деформирования связь между перемещениями узлов элемента и силами, действующими при этом на него, должна быть линейной. Например, с увеличением смещения
68
вдвое все усилия, действующие на узлы элемента, также должны увеличиться вдвое.
Основной характеристикой конечного элемента является матрица жесткости элемента K (e) . Она связывает вектор узловых переме-
щений U (e) и вектор приложенных к элементу узловых усилий R (e)
соотношением
R(e) K (e) U (e) ,
выражающим линейный характер связи между действующими на узлы силами и узловыми перемещениями.
Поскольку вектора U (e) и R (e) имеют размерность nст , число строк и столбцов в матрице K (e) тоже должно быть равным nст
R (e) (nст 1) K (e) (nст nст ) U (e) (nст 1).
Введем обозначение K ijmk(e) усилие, действующее на узел m
элемента e по направлению i , от единичного перемещения узла k этого же элемента e по направлению j при условии, что перемещения по направлению всех остальных степеней свободы в элементе
равны нулю. Например, K1312(6) усилие, действующее на узел 1 элемента 6 по направлению 1 при единичном перемещении узла 2 этого
же элемента 5 по направлению 3, а K1111(3) усилие, действующее на
узел 1 элемента 3 по направлению 1 от единичного смещения этого же узла по этому же направлению [9].
Важно четко помнить порядок индексов, стоящих при k . Верхний индекс это номер элемента. Первые два нижних индекса направления, причем первый из них номер направления определяемого усилия, а второй номер направления, в котором произошло единичное перемещение. Вторые два нижних индекса номера узлов элемента, причем первый из них номер узла, в котором определяется усилие, второй в котором задано единичное перемещение.
Для рассматриваемого элемента (см. рис.4.2 – 4.3) матрица жесткости элемента имеет вид
69
k (11) |
k (11) |
k (11) |
k (11) |
k (11) |
|
|
|
1111 |
1211 |
1112 |
1212 |
1312 |
|
k (11) |
k (11) |
k (11) |
k (11) |
k (11) |
|
|
|
2111 |
2211 |
2112 |
2212 |
2312 |
. |
K (11) k (11) |
k (11) |
k (11) |
k (11) |
k (11) |
||
|
1121 |
1221 |
1122 |
1222 |
1322 |
|
k (11) |
k (11) |
k (11) |
k (11) |
k (11) |
|
|
|
2121 |
2221 |
2122 |
2222 |
2322 |
|
(11) |
(11) |
(11) |
(11) |
(11) |
||
k3121 |
k3221 |
k3122 |
k3222 |
k3322 |
|
|
Можно заметить, что столбцы этой матрицы состоят из усилий, действующих на узлы элемента при единичном смещении по направлению какой-либо из его степеней свободы при условии, что перемещения по направлению остальных степеней свободы равны нулю.
Например, первый столбец представляет собой усилия, действующие на узлы элемента при единичном смещении узла 1 (4-й индекс при коэффициентах) по направлению 1 (2-й индекс при коэффициентах) при условии, что перемещения по направлению остальных степеней свободы равны нулю. Второй столбец представляет собой усилия, действующие на узлы элемента при единичном смещении узла 1 (4-й индекс при коэффициентах) по направлению 2 (2-й индекс при коэффициентах) при условии, что перемещения по направлению остальных степеней свободы равны нулю и так далее.
Если узел k элемента e получает по направлению j единичное перемещение, то усилие, действующее при этом на узел m по направлению i равно Kijmk(e) . Если же это перемещение будет равно не единице, а u jk , то в соответствии с линейным законом связи между усилиями и перемещениями рассматриваемое усилие увеличится также в u jk раз и составит u jk Kijmk(e) .
Пусть теперь все узлы элемента получают смещения по направлению всех имеющихся у элемента степеней свобод. Тогда, в соответ-
ствии с принципом суперпозиций, усилие rim(e) , т.е. усилие, действую-
щее на какой-либо узел m по какому-либо направлению i , будет представлять собой сумму усилий, вызванных смещениями всех узлов элемента по направлению всех имеющихся степеней свобод. Поскольку при перемещении какого-либо узла k по направлению j на
величину u jk на узел m по направлению i будет действовать усилие u jk Kijmk(e) , суммарное усилие, действующее на узел m по направле-
70