Материал: 1753
|
|
|
|
. |
А |
2 |
3 |
|
В |
1 |
|
4 |
||
d |
d |
d |
d |
d |
|
m11 |
m12 |
m13 |
m14 |
|
|
|
||
|
|
|
|
|
|
|
|
|
Л.в. М1 |
|
m21 |
m22 |
m23 |
|
|
|
m24 |
||
|
|
|
|
|
|
|
|
|
Л.в. М2 |
|
m31 |
m32 |
m33 |
m34 |
|
|
|||
|
|
|
||
|
|
|
Л.в. М3 |
|
|
|
|
|
|
|
m41 |
m42 |
m43 |
m44 |
|
|
Л.в. М4 |
||
|
|
|
||
|
|
|
|
|
|
|
Рис. 2.23 |
|
|
Из анализа рис. 2.23 и выражений (2.22) ясно, что элементами |
||||
матрицы влияния Lm являются ординаты линий влияния моментов М |
||||
для каждого сечения соответственно. Для данного примера эта мат- |
||||
рица примет следующий вид: |
|
|
|
|
|
|
|
|
m11 |
m12 |
|
|
m13 |
|
|
m14 |
|
|
|
|
|
|
|
|
||||||||||||||||
L |
|
m21 |
m22 |
|
|
m23 |
|
|
m24 |
|
|
матрица влияния моментов. |
|||||||||||||||||||||||
m |
|
|
|
m |
m |
|
|
m |
|
|
m |
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
31 |
|
|
32 |
33 |
|
|
34 |
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
m41 |
m42 |
|
|
m43 |
|
|
m44 |
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
4d |
3d |
|
|
2d |
1d |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
n |
|
|
|
n |
|
|
|
|
|
n |
|
|
|
n |
|
|
|
|
|
|
|
4 |
3 |
2 |
1 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
3d |
6d |
|
|
4d |
2d |
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
d |
|
3 |
6 |
4 |
2 |
|
|
|||||||||||||||||||
L |
|
|
|
n |
|
|
|
n |
|
|
|
|
n |
|
|
|
n |
|
|
|
|
|
. |
(2.23) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|||||||||||||||||
m |
|
|
2d 4d 6d 3d |
|
|
|
|
2 4 6 |
3 |
|
|
||||||||||||||||||||||||
|
|
|
|
n |
|
|
n |
|
|
|
n |
|
|
n |
|
|
|
1 |
2 |
3 |
4 |
|
|
||||||||||||
|
|
|
1d |
2d |
|
|
3d |
4d |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
n |
|
|
n |
|
|
|
n |
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
30 |
|
|
|
|
|
|
|
|||||
Из анализа структуры матрицы влияния Lm наблюдается закономерность в определении элементов матрицы влияния моментов, что позволяет вычислить любой элемент матрицы по формулам: при i j
mij=(d/n) (n j); при i j mij=(d/h) (n i).
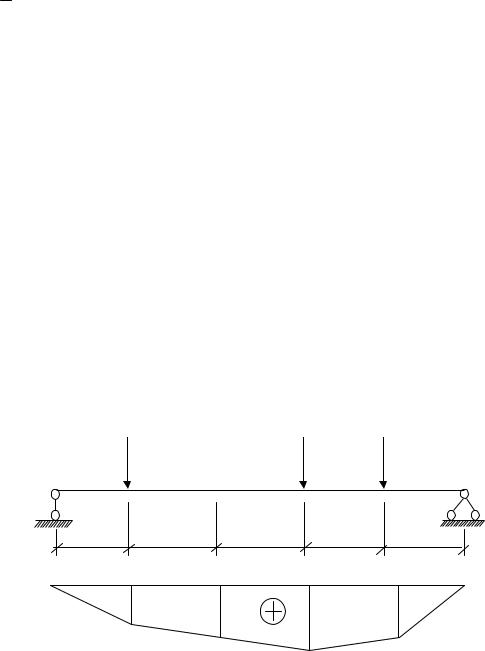
Рассмотрим пример построения эпюры М для балки (рис. 2.24), нагруженной системой сосредоточенных сил F. Пролёт балки =10 м разделён на пять частей, т.е. n=5. Тогда длина одной части составит
d. F1 = 5 кН; F2 = 15 кН; F3 = 5 кН. n
Построение эпюры М будем осуществлять в соответствии с выражением (2.19), которое в матричной форме имеет вид
M Lm F . |
(2.24) |
При этом вектор-столбец искомых моментов M , вектор-столбец F и матрица влияния моментов Lm приобретают следующий вид:
|
М1 |
|
|
F1 |
|
|
|
4 |
3 |
2 |
1 |
|
||
|
|
|
|
|
||||||||||
|
|
|
|
|
d |
|
3 6 |
4 |
2 |
|
||||
М |
M2 |
; |
F |
0 |
; |
L |
|
. |
||||||
n |
6 |
|||||||||||||
|
M3 |
|
|
F2 |
|
m |
2 |
4 |
3 |
|
||||
|
M4 |
|
|
F3 |
|
|
|
|
1 |
2 |
3 |
4 |
|
|
|
|
|
|
|
|
|
|
|
||||||
Подставляя полученные матрицы в выражение (2.24) и совершая операцию перемножения матриц, получаем вектор-столбец искомых усилий изгибающих моментов М.
F1 |
|
|
F2 |
F3 |
В |
А |
|
|
|
|
|
1 |
2 |
|
3 |
4 |
|
d |
d |
d |
d |
|
d |
22 |
34 |
|
Эп. М, кНм |
46 |
28 |
||
|
|
|
Рис. 2.24
31
|
M1 |
|
|
4 |
3 |
2 |
1 |
|
5 |
|
22 |
|
||
|
|
|
|
|
|
|
||||||||
|
|
2 |
|
3 |
6 |
4 |
2 |
|
|
|
||||
M2 |
|
|
0 |
|
34 |
. |
||||||||
M |
|
|
|
|||||||||||
5 |
2 |
4 |
6 |
|||||||||||
|
M3 |
|
3 |
|
15 |
|
46 |
|
||||||
|
M4 |
|
|
|
1 |
2 |
3 |
4 |
|
5 |
|
28 |
|
|
|
|
|
|
|
|
|
|
|
||||||
По полученному вектору искомых изгибающих моментов построена эпюра М (см. рис. 2.24).
Матрицы влияния моментов для балок-консолей имеют следующий вид:
|
0 |
1 |
2 . |
n |
|
|
||
|
0 |
0 |
1 . |
n 1 |
|
|||
Защемление балки слева Lm d |
. . |
|
. . |
. |
|
. |
||
|
0 |
0 |
|
0 . |
1 |
|
|
|
|
0 |
0 |
|
0 |
0 |
0 |
|
|
|
|
0 |
|
0 |
0 |
. |
0 |
|
|
|
|
|
|||||
|
|
1 |
. |
0 |
0 |
0 |
|
|
Защемление балки справа Lm d |
|
. |
|
. . |
. . |
. |
||
|
n 1 |
. 1 0 |
0 |
|
||||
|
|
n |
. |
2 |
1 |
0 |
|
|
32
3. РАСЧЁТ РАСПОРНЫХ СИСТЕМ
3.1. Общие сведения
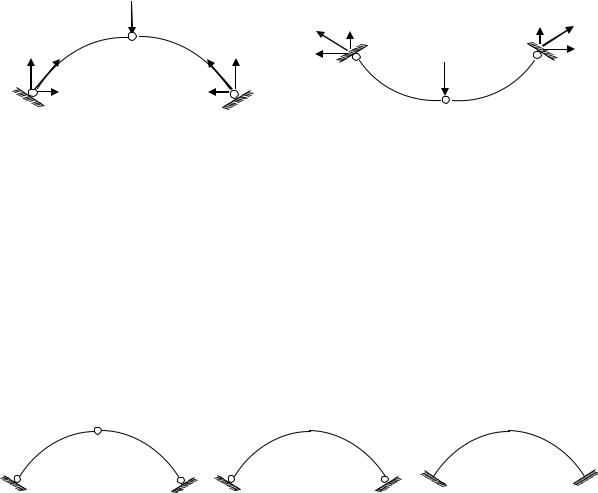
Распорной называется такая система, в результате действия на которую вертикальных внешних нагрузок в ней возникают наклон-
ные опорные реакции. На рис. 3.1 показаны два типа распорных систем.
F |
|
RА |
VА |
VВ |
RВ |
VА |
VВ |
HА |
|
|
|
С |
RВ |
|
F |
HВ |
|
RА |
|
А |
|||
HА |
HВ |
|
|
В |
|
|
|
С |
|
||
А |
В |
|
|
||
а |
|
Рис. 3.1 |
|
б |
|
При расчёте распорных систем наклонную опорную реакцию R раскладывают на две составляющие: вертикальную V и горизонтальную Н. Горизонтальная составляющая Н опорной реакции называется распором. Если горизонтальная составляющая Н направлена вовнутрь конструкции, то такую конструкцию называют арочной системой (рис. 3.1, а), если наружу висячей системой (рис. 3.1, б). В настоящем курсе рассматривается только арочная система (арка).
По степени статической определимости различают арки: трёхшарнирные (рис. 3.2, а), двухшарнирные (рис. 3.2, б) и бесшарнирные
(рис. 3.2, в).
а |
б |
в |
|
||
|
|
|
|
Рис. 3.2 |
|
Арки могут быть как сплошными, так и решётчатыми. Опоры арки могут располагаться как в одном уровне, так и в разных уровнях.
Конструктивные элементы арки показаны на рис. 3.3: пролёт арки; f стрела подъёма арки; шарниры А и В называются пятовыми, а шарнир С замковым. Элемент арки между шарнирами А и С называется левой полуаркой, а между шарнирами В и С правой полу-
33
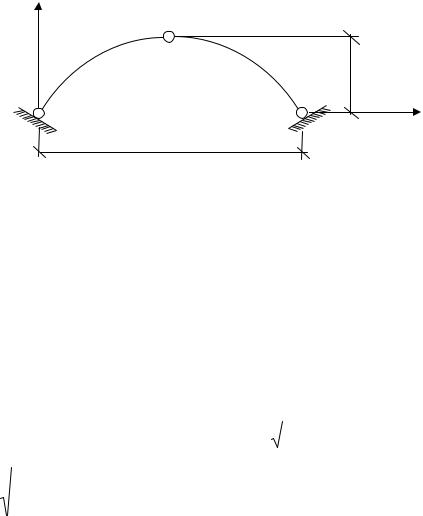
аркой.
По отношению стрелы подъёма арки к её длине различают сле-
дующие типы арок: |
f |
|
1 |
подъёмистая арка; |
f |
|
1 |
пологая арка. |
|
|
|
|
|||||
|
5 |
|
5 |
|
||||
y
С
f
А |
В |
х |
|
|
|
ℓ
Рис. 3.3
Ось арки может быть очерчена различными кривыми. Наиболее часто в практике транспортного строительства используется парабола, описанная выражением (3.1), и дуга окружности, описанная выражением (3.2).
|
|
|
|
y |
4 f |
|
x x |
парабола. |
|
(3.1) |
||||||||||||||
|
|
|
|
2 |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Тригонометрические функции, соответствующие параболе, имеют |
||||||||||||||||||||||||
следующий вид: tg = |
|
4 f |
2x ; cos = |
1 |
|
|
|
; sin = cos tg . |
||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
1 tg2 |
|
|
|||||||||
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
у |
R2 |
|
x |
|
R f |
|
дуга окружности. |
|
(3.2) |
|||||||||||||||
|
|
|
||||||||||||||||||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тригонометрические функции, соответствующие дуге окружно- |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
f |
|
|
|
2 |
|
|
2x |
|
|
|
|
y R f |
|
|||
сти, имеют такой вид: |
R |
|
|
|
|
|
; sin |
|
|
|
; |
cos |
|
. В |
||||||||||
|
|
|
|
|
2R |
R |
||||||||||||||||||
|
|
|
|
2 |
|
|
|
8f |
|
|
|
|
|
|
|
|||||||||
последних формулах R радиус окружности.
3.2. Расчёт трёхшарнирной арки на статическую нагрузку
Как и любой расчёт, расчёт трёхшарнирной арки начинают с определения опорных реакций. На рис. 3.4 изображена арка с пятами на одном уровне, находящаяся под воздействием системы внешних нагрузок.
34