Материал: 1753
лой.
Произведение (2.6) считается положительным, если вектор сосредоточенной силы направлен вниз, а ордината л.в. положительна или если вектор сосредоточенной силы направлен вверх, а ордината л.в. отрицательна.
Если над линией влияния находится система сосредоточенных сил, то в соответствии с принципом суперпозиции усилие S будет равно сумме произведений сил на соответствующие ординаты.
Определение усилия с помощью линии влияния от действия на балку равномерно распределённой нагрузки интенсивностью q иллюстрируется на рис. 2.13. Элементарная сосредоточенная сила, выделенная из заданной, равна dF = q dℓ. Тогда элементарное усилие dSq от загружения л.в. сосредоточенной силой dF будет равно
dSq = dF y = q d y.
b
Полное усилие Sq = q y d .
a
 F
F
|
|
|
SF |
F y ; |
|
|
Л.в. S |
|
n |
|
y |
SF |
Fi yi . (2.6) |
|
|
|
|||
|
|
|
|
i 1 |
Рис. 2.12 |
|
|
||
|
|
|
||
После интегрирования получается, что усилие Sq от загружения л.в. равномерно распределённой нагрузкой интенсивностью q или от системы равномерно распределённых нагрузок различной интенсив-
ности может быть определено: Sq = |
q ; |
|
n |
|
|
Sq = qi |
i . |
(2.7) |
i 1 |
|
|
Произведение q считается положительным, если вектор интенсивности распределённой нагрузки направлен вниз, а площадь л.в.является положительной. При этом следует помнить, что в формулах (2.7) участвует вся площадь л.в., находящаяся в пределах действия распределённой нагрузки.
20
|
|
|
dF q |
|
|
|
|
|
|
|
М |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
dℓ |
|
F |
||
|
а |
|
|
dℓ |
|
в |
|
||||||||||||
|
|
y |
|
|
|
|
|
|
Л.в. S |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
yа |
|
|
|
|
|
|
|
yв |
|
|
|
|
Л.в. S |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
yлев |
|
|
yправ |
|
|
|
|
|
Рис. 2.13 |
ω |
|
||||||||||||||
|
|
|
|
Рис. 2.14 |
|||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
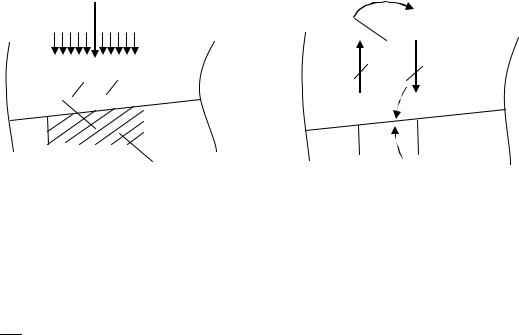
При загружении л.в. сосредоточенным моментом М (рис. 2.14) удобно представить этот момент в виде пары одинаковых сил Fлев= F
иFправ = F, векторы которых направлены в противоположные стороны
ирасположены на расстоянии d друг от друга. Тогда М = F d F =
=М . В этом случае усилие SM в соответствии с (2.6) можно найти из d
выражения SM = F yлев + F управ .
После преобразований получим |
SM = М |
управ улев |
. |
||
d |
|||||
|
управ улев |
|
|
||
Так как выражение |
представляет собой тангенс угла |
||||
d |
|||||
|
|
|
|
||
наклона л.в. к базовой линии, можем записать выражения (2.8), первое из которых даёт возможность определить по л.в. усилие SM от действия одного сосредоточенного момента М, а второе от действия системы таких моментов в количестве n.
n
SM = М tg ; |
SM =Σ Мi tg i. |
(2.8) |
|
i=1 |
|
В (2.8) произведения считаются положительными, если направляющий вектор сосредоточенного момента М пытается «прижать» л.в. к базовой линии.
2.7. Кинематический способ построения линий влияния
Кинематический способ построения линий влияния основан на принципе возможных перемещений (принцип Лагранжа). Если сис-
тема твёрдых тел, связанная между собой идеальными связями, на-
21
ходится в равновесии, то сумма работ всех заданных сил на любых сколь угодно малых возможных перемещениях равна нулю.
Идеальными считаются такие связи, в которых отсутствуют трение, обмятия узлов и другие аналогичные явления. Возможными считаются такие перемещения, какие допускают идеальные связи.
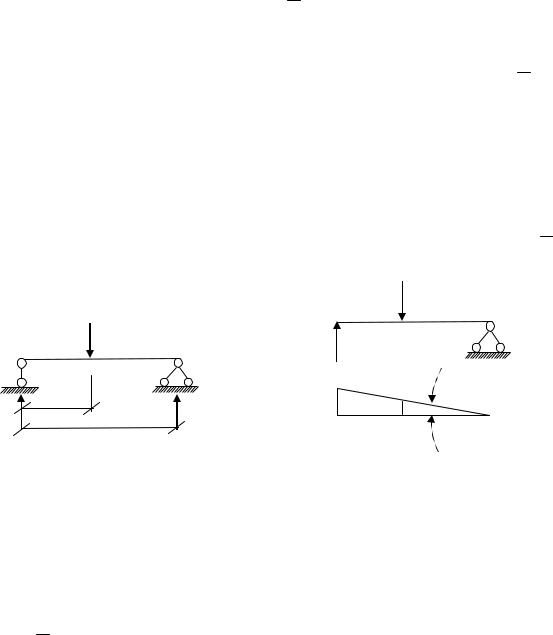
В соответствии с этим методом каждая линия влияния представляет собой эпюру перемещений. Рассмотрим построение линии влияния опорной реакции (рис. 2.15) для однопролётной балки АВ. Поместив подвижную единичную силу F в произвольную точку, отбрасывают опорную связь в точке А.
Под действием силы балка АВ, ставшая механизмом, повернётся вокруг опоры В на угол , а перемещение точки под силой F составит величину у.
В соответствии с принципом Лагранжа можно записать следую-
щее выражение: |
_ |
|
|
|
|
|
|
F у RA = 0. |
|
(2.9) |
|
Работа |
силы |
взята со знаком минус, так как сила RA |
противо- |
||
положна направлению перемещения точки А. Учитывая, |
что F 1, |
||||
найдём RA = 1 у . |
|
|
_ |
|
|
|
|
F=1 |
|
||
|
|
|
|
|
|
|
_ |
|
А |
|
В |
|
|
|
|
||
А |
F=1 |
В |
RА |
|
|
|
y |
|
|
||
х |
|
|
|
Л.в. RА |
|
ℓ |
|
|
|||
|
|
||||
RА |
RВ |
|
|
|
|
|
|
|
Рис. 2.15 |
|
|
Если ординаты возможных перемещений выразить как функцию угловой скорости возможного вращения вокруг шарнира В, то выражение величины опорной реакции получит такой же вид, как и
выражение (2.1), т. е. RA = |
x |
. Исходя из этого, когда подвижная |
|
|
|||
|
|
сила F будет находиться над опорой А, станет соблюдаться равенство у= .
При построении линии влияния момента для превращения балки АВ в механизм (рис. 2.16) в сечение, для которого требуется постро-
22
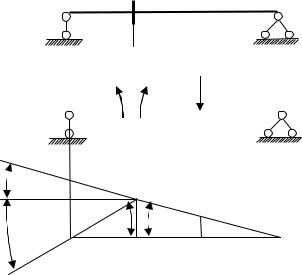
ить эту линию влияния, вводят условный шарнир. Высвободившееся усилие обозначают символом M.
Введение шарнира даёт балке возможность провиснуть, и эпюра возможных перемещений такой балки охарактеризуется двумя прямыми, взаимно пересекающимися на вертикали под шарниром. Восстановление равновесия может быть достигнуто приложением в рассматриваемом сечении двух равных взаимно противоположных моментов М.
Выражение возможной работы в этом случае примет следующий вид:
М М F y . |
(2.10) |
||||
Учитывая то, что |
|
1, из (2.10) найдём М = |
1 у |
. |
|
F |
|||||
|
|||||
_ |
|
||||
К F=1
F=1
а
_
М М F=1
А 
 В
В
α |
К |
y |
|
|
|
|
|
|
|
α |
|
Рис. 2.16
Величины угловых смещений и по их малости могут быть заменены тангенсами углов, а именно к а, тогда последнее выражение примет вид
М = |
у |
|
у |
а |
х |
. |
(2.11) |
|
|
|
|||||
|
|
к |
|
|
|||
По выражению (2.11) можно найти ординаты линии влияния М. При построении линии влияния поперечной силы Q для превращения
23
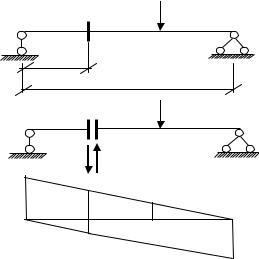
балки АВ в механизм (рис. 2.17) в сечение, в котором требуется построить эту линию влияния, вводят условное устройство, допускающее только взаимный сдвиг звеньев балки между собой.
|
|
_ |
|
А |
К |
F=1 |
В |
|
а |
ℓ |
|
|
|
|
|
|
|
_ |
|
А |
|
F=1 |
В |
|
Q |
Q |
|
|
y |
c |
|
|
c′ |
|
|
Выражение возможной работы в этом случае примет вид
Q c Q c′ + F y = 0.
Откуда с учётом того, что с +с′ = , находят
Q = |
ó |
|
õ |
. |
(2.12) |
|
|
||||
|
|
|
|
||
Рис. 2.17
2.8.Определение расчётного положения подвижной системы нагрузок
Расчётное положение подвижной системы сосредоточенных сил над линией влияния усилия S соответствует max или min искомой величины этого усилия. В общем случае искомое усилие S может иметь несколько экстремальных (max или min) значений.
Искомое усилие S=f(x) функционально зависит от положения системы сосредоточенных сил на балке. Для определения его экстремального значения необходимо, чтобы первая производная от усилия S по координате x соответствовала условию dS/dx = 0. Исходя из этого, можно найти такое положение подвижной системы сосредоточенных сил, при котором S=f(x) достигает экстремального значения.
Рассмотрим определение экстремального значения усилия S при загружении треугольных линий влияния.
Для случая, когда вершина треугольника линии влияния находится в начале или в конце линии влияния (рис. 2.18), экстремальным положение подвижной системы сосредоточенных нагрузок будет тогда, когда вся наибольшая нагрузка находится над вершиной линии влияния или вся система нагрузок находится над всей линией влияния, на-
24