Материал: 1753
Из анализа рис. 1.1 очевидно, что диск на плоскости обладает тремя степенями свободы он может перемещаться поступательно вдоль осей х и у соответственно и поворачиваться (угол ) вокруг центра тяжести диска. Зная эти три параметра, можно точно определить положение диска на плоскости.
1.2. Опоры
Для того чтобы в процессе создания и последующей эксплуатации сооружение оставалось геометрически неизменяемым и неподвижным по отношению к основанию (как говорят в строительной механике, к земле), сооружение с землёй соединяют специальными устройствами, называемыми опорами, каждая из которых лишает сооружение определённого числа степеней свободы. Всякое устройство, отнимающее у жёсткого диска одну степень свободы, называется про-
стой кинематической связью.
Вопорах возникают опорные реакции, которые вместе с внешними нагрузками создают уравновешенную систему сил, действующую на сооружение.
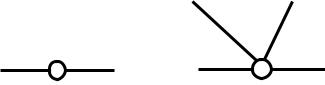
Встроительной механике различают три типа опор, состоящих из определённого числа простых кинематических связей. Кинематическая связь представляет собой прямолинейный стержень, ограниченный с обеих сторон шарнирами. Шарниры бывают простыми, когда они соединяют два стержня, и кратными, когда они соединяют более чем два стержня (рис.1.2). Кратность шарнира определяется числом стержней, сходящихся в нём, без единицы.
Однократный шарнир |
Трёхкратный шарнир |
и т. д. |
Рис. 1.2
5
Каждый простой шарнир предполагает наличие в нём двух простых кинематических связей.
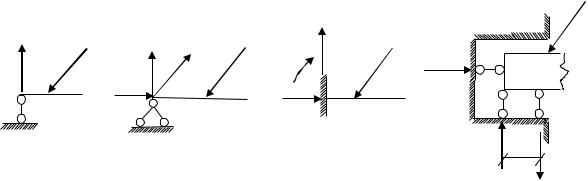
Шарнирно-подвижная опора (рис. 1.3, а) состоит из одной простой кинематической связи. Такая опора лишает диск на плоскости одной степени свободы, то есть она не даёт возможности поступательного перемещения вдоль продольной оси этой опорной связи. При любом характере нагружения диска внешней нагрузкой опорная реакция R в шарнирно-подвижной опоре может быть направлена только вдоль оси этой простой кинематической связи и перпендику-
лярно продольной оси диска.
F
R |
F V |
R |
F М V F |
H |
|
|
|
|
|
|
H |
|
|
|
|
|
|
H |
V ℓ0 V |
|
|
|
|
|
|
а |
б |
в |
г |
|
|
|
|
|
|
|
|
Рис. 1.3 |
|
Шарнирно-неподвижная опора (рис. 1.3, б) состоит из двух простых кинематических связей. При таком характере прикрепления диска к земле опорная реакция R может быть направлена под углом к продольной оси диска. Такую опорную реакцию разлагают на две взаимно-перпендикулярные составляющие вертикальную V и горизонтальную Н. Шарнирно-неподвижная опора отнимает у диска на плоскости две степени свободы, лишая его возможности поступательного перемещения по двум взаимно-перпендикулярным направлениям.
Жёсткая заделка (защемление) предполагает наличие в ней трёх простых кинематических связей (рис. 1.3, в), отнимающих у диска на плоскости три степени свободы, лишая его возможности как поступательных, так и угловых перемещений. При таком закреплении диска возникающую опорную реакцию раскладывают на три составляющиеV, Н и М. Характер возникновения опорного момента М=V ℓ0 иллюстрируется шарнирно-стержневым эквивалентом защемления (рис. 1.3, г).
При этом величина опорного момента равна М=V ℓ0.
6
1.3. Геометрический анализ изменяемости стержневых систем
Число степеней свободы n сооружения в целом может быть определено по формуле П.Л. Чебышева
n = 3Д 2Ш – С0. |
(1.1) |
Каждая цифра и символ этой формулы несут свою смысловую нагрузку: Д описывает число жёстких дисков рассматриваемой стержневой системы; 3 означает, что каждый диск на плоскости обладает тремя степенями свободы; Ш описывает число простых шарниров; 2 со знаком минус означает, что каждый простой шарнир «отнимает» у жёсткого диска на плоскости две степени свободы, т. е. предотвращает возможность поступательных перемещений диска по двум взаим- но-перпендикулярным направлениям; С0 описывает число простых кинематических связей; 1 и знак минус означает, что каждая простая кинематическая связь «отнимает» у жёсткого диска одну степень свободы, т.е. предотвращает возможность линейного перемещения диска вдоль стержня простой кинематической связи.
Для кинематического анализа таких стержневых систем, как фермы, удобно пользоваться формулой
n = 2У - Сф - Со, |
(1.2) |
где У описывает число узлов фермы, а 2 означает, что каждый узел фермы на плоскости обладает двумя степенями свободы; Сф и С0 описывают число стержней фермы и число опорных простых кинематических связей соответственно; 1 перед ними означает, что каждый стержень налагает на координаты узлов фермы условие постоянства расстояния между узлами фермы. Если в результате определения числа степеней свободы (степени изменяемости) стержневой системы оказывается, что n>0, то система считается изменяемой, так как она не обладает необходимым минимумом связей. Такая система является геометрически изменяемой и не может быть использована в качестве сооружения.
Сиcтема, для которой n = 1, называется механизмом и она тоже не может быть использована в качестве сооружения. Случай, когда n=0, означает, что рассматриваемая система обладает необходимым мини-
7
мумом связей и при определённых условиях может быть использована в качестве сооружения. При n 0 рассматриваемая система обладает числом связей больше необходимого минимума. Естественно, что такая система может быть использована в качестве сооружения. Последнее условие n <0 является необходимым, но недостаточным для точной оценки геометрической изменяемости стержневой системы, поскольку геометрическая изменяемость стержневой системы зависит не только от числа связей, но и от их расположения.
Для полной оценки изменяемости стержневой системы необходимо соблюдать следующие принципы образования геометрически неизменяемых систем:
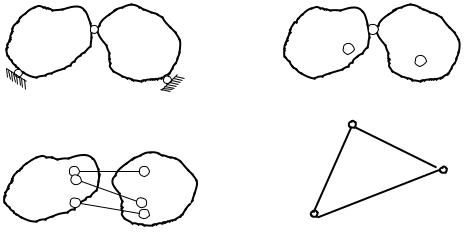
1)присоединение к жёсткому диску системы двухстержневого звена (диады) не изменяет степени свободы стержневой системы (рис. 1.4, а);
2)два жёстких диска могут быть соединены жёстко с помощью шарнира С и стержня АВ, ось которого не проходит через центр шар-
нира (рис. 1.4, б);
3)два жёстких диска могут быть соединены геометрически неизменяемо друг с другом тремя стержнями, оси которых не пересекаются в одной точке (рис. 1.4, в);
4)три жёстких диска (или стержня) можно соединить в геометрически неизменяемую систему с помощью трёх шарниров, не лежащих на одной прямой.
С
А
 В
В
а |
б |
в |
г |
|
Рис. 1.4 |
||
|
Несоблюдение указанных принципов образования геометрически неизменяемых систем может привести не только к появлению просто
8
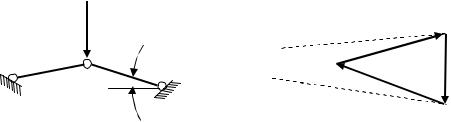
геометрически неизменяемой системы, но и к так называемой мгновенно изменяемой системе. Рассмотрим всегда геометрически неизменяемую двухстержневую систему АСВ, нагруженную в шарнире С сосредоточенной силой F так, как это показано на рис. 1.5.
|
F |
|
NАС |
|
D |
|
|
|
|
NА |
|
||
А |
|
В |
Е |
F |
||
NВ |
||||||
|
С |
|
NВС |
|
|
|
|
|
|
|
H |
||
|
|
|
|
|
||
|
|
|
Рис. 1.5 |
|
|
На построенном силовом треугольнике сторона ДЕ параллельна стержню АС и длина её в соответствии с принятым масштабом сил равна величине продольного усилия NАС, а длина ВС соответственно равна величине NBC. При уменьшении угла , что видно из силового треугольника, величины усилий NАС и NBC при неизменности значения силы F будут увеличиваться и в какое-то мгновение, когда все три шарнира окажутся на одной прямой, величины этих усилий станут равными бесконечности и стержни разрушатся. Вот почему мгновенно изменяемые системы не могут быть использованы в качестве строительных конструкций.
9