Материал: 1671
|
3.5.2. |
Определение |
действительного |
|
|
|
|
||||||
|
|
изображения |
треугольника |
ABC |
|
|
|
|
|||||
Определение действительного |
изображения |
треугольника |
ABC |
- |
|||||||||
это задача по преобразованию плоскости общего положения |
ABC |
в |
|||||||||||
частное положение. |
|
|
|
|
|
|
|
|
|
|
|
||
Пусть задана |
плоскость |
ABC общего положения. Это означает, |
|||||||||||
что, например, h3 |
II ОХ |
, |
h,J ОХ , |
hxHOX |
или |
/ 3 # ОХ , |
/2//ОХ |
, |
|||||
/, i ОХ |
или q3# ОХ , q2# ОХ, |
qxll ОХ • Выберем любую из этих ли |
|||||||||||
ний уровня. На рисунке 3.35 выбрана линия /2 // ОХ |
и построена /,. |
||||||||||||
Можно было построить |
/3 |
и вести все построения относительно нее. |
|||||||||||
Выбрана новая гиперплоскость проекций oxXxZT |
, при этом ось ОХ, |
||||||||||||
принадлежит плоскости OXY . На гиперплоскости проекций построе |
|||||||||||||
ны проекции Л4£4 С4 и А5В5С5, причем А.ХВЛС,Х |
- вырожденная про |
||||||||||||
екция. |
|
|
|
|
|
|
|
|
|
|
|
|
|
Затем выбрана гиперплоскость проекций |
02X2ZT |
, параллельная |
|
||||||||||
плоскости ЛВС. На чертеже |
это означаетвыбор оси ОгХ2 // Л4Я4С4. |
||||||||||||
Построены проекции АЛВ6Св |
и Л7В7С-,. Поскольку |
ABC И ()2Х 2ZT , то |
|||||||||||
на эту |
гиперплоскость |
треугольник ABC проецируется в |
"натураль |
||||||||||
ную |
величину". |
Другими |
словами, |
плоскость |
ЛВС в |
системе |
|||||||
02X2YZT является |
плоскостью |
уровня. |
Таким образом, |
произошло |
|||||||||
понижение размерности пространства, в котором расположена плос
кость ABC. Теперь можно считать, |
что треугольник ABC |
расположен |
в трехмерном пространстве и его |
проекции есть А6ВЬСЬ |
и Л7 #7 С7 . |
Дальнейшие построения такие же, как и в трехмерном пространстве. Окончательно получаем проекцию A9BqCq, которая представляет со бой действительное изображение треугольника ABC.
В зависимости от выбора прямой уровня можно реализовать шесть направлений решения задачи. Во всех из них будет получено одно и то же действительное изображение треугольника ABC.
На рисунке 3.35 выбор осей ОхХх, ОгХ2, 03Х3, 0,Х_Х диктует ся направлением линий /,, Л4В4С4, А5, Л8#8С8. Расстояния, отклады ваемые от осей OiXi следующие: l-^^nj = ИгЛт!' j^s^xi! = ИзДг|>
= |.47 4гз|. Аналогично, для точек Вх...., В9 и С,,..., С9.
80 |
81 |
3.6.Моделирование гиперплоскостей пространства Еп
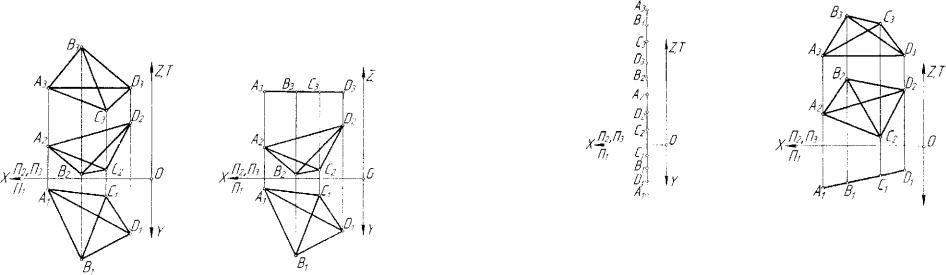
Гиперплоскость (3-плоскость) пространства Еп определяется че тырьмя параметрами или задается четырьмя независимыми точками пространства. Пусть это будут точки A,B,C,D . Тогда на простейшей модели будут проекции (AUA2,A2), (S,,B2, В3 ), (С1 5 С2 ,С3 ) и (£>,.D2 ,£>3 ) (рис. 3.36). От этого задания можно перейти к другому
Рис. 3.36. Модель гиперплоскости |
Рис. 3.37. Гиперплоскость уровня |
||
относительно гиперплоскости |
|||
пространства |
Ел |
||
OXYZ пространства Е4 |
|||
|
|
||
заданию гиперплоскости, например, двумя скрещивающимися пря мыми - ребрами тетраэдра ABCD , плоскостью и точкой - гранью и противоположной вершиной тетраэдра ABCD , плоскостью и пересе кающей ее прямой, тремя прямыми, пересекающимися в одной точке и т.д.
Судя по чертежу, можно утверждать, что гиперплоскость ABCD является гиперплоскостью общего положения по отношению к гипер
плоскостям проекций |
OXYZ , |
OXYT , |
OXZT , но ничего определенно |
||
го нельзя сказать о ее положении |
относительно |
гиперплоскости |
|||
OYZT . |
|
|
|
|
|
Гиперплоскость |
ABCD |
частного |
положения может быть |
парал |
|
лельна одной из |
гиперплоскостей |
проекций. |
Например, |
если |
|
/ 4 = tB |
= tc = tD |
= сош7 , то гиперплоскость ABCD будет параллельна |
|
гиперплоскости |
OXYZ (рис. |
3.37). Такая гиперплоскость называется |
|
гиперплоскостью уровня. |
|
||
На |
рисунке |
3.38 приведена модель гиперплоскости уровня |
|
(ABCD )// OYZT, для которой |
хА = хв = хс = xD = const. |
||
|
Y |
Рис. 3.38. Гиперплоскость уровня |
Рис. 3.39. Проецирующая относительно |
относительно гиперплоскости |
OXY гиперплоскость |
|
|
OYZT пространства ЕА |
пространства |
|
Гиперплоскость может быть перпендикулярна какой-либо плос кости проекций. Тогда на этой плоскости проекций проекция гиперп лоскости будет вырожденной. На рисунке 3.39 показана гиперпло скость ABCD , перпендикулярная плоскости OXY . Такая гиперпло скость называется проецирующей относительно плоскости OXY . Аналогично будут выглядеть модели проецирующих гиперплоскостей относительно других плоскостей проекций.
Следует заметить, что невырожденными проекциями гиперпло скости будут все поля проекций OXZ , OXY (рис. 3.37) и ОХТ, OXZ (рис. 3.39).
3.6.1. Принадлежность точки, прямой и плоскости гиперплоскости
Можно сформулировать следующие признаки принадлежности:
83
82
1) точка принадлежит гиперплоскости, если она принадлежит какой-либо линии данной гиперплоскости;
2)точка принадлежит гиперплоскости, если она принадлежит какой-либо плоскости данной гиперплоскости;
3)прямая принадлежит гиперплоскости, если две ее точки при надлежат данной гиперплоскости;
4)плоскость принадлежит гиперплоскости, если три ее точки, не лежащие на одной прямой, принадлежат данной гиперплоскости.
Очевидно, что для рисунков 3.37, 3.38, 3.39 задача о принадлеж
ности точки данной гиперплоскости частного положения решается
просто, без дополнительных построений. Так на |
рисунке 3.37 доста |
||||||||||||
точно, |
чтобы |
проекция |
|
Е3 |
точки Е(Е},Е2,Е3) |
принадлежала пря |
|||||||
мой A3B3C3D3. |
Тогда Е е (ABCD). То же самое относится к гиперп |
||||||||||||
лоскости, |
изображенной |
|
на |
рисунке 3.39. Если E]sA]B,ClDl, то |
|||||||||
Е(ЕХ,Е2,Е3) е (ABCD ). |
|
|
|
|
|
||||||||
|
Рассмотрим |
эту |
задачу |
в |
|
|
|||||||
общем случае. Пусть дана ги |
|
|
|||||||||||
перплоскость ABCD (рис. 3.40). |
|
|
|||||||||||
Пусть |
|
будет' |
|
дана |
|
точка |
|
|
|||||
Е{Е,,Е2.Е3), относительно ко |
|
|
|||||||||||
торой нельзя сказать ничего оп |
|
|
|||||||||||
ределенного |
по принадлежности |
|
|
||||||||||
ее |
данной |
|
гиперплоскости. |
|
|
||||||||
Предположим, |
что |
существует |
|
|
|||||||||
точка F(F},F2), |
принадлежащая |
|
|
||||||||||
данной |
гиперплоскости и |
кон |
|
|
|||||||||
курирующая |
с |
Е |
относительно |
|
|
||||||||
плоскостей OXY |
и OXZ . Тогда |
|
|
||||||||||
по |
условию |
принадлежности, |
|
|
|||||||||
можно построить точку F, - |
|
|
|||||||||||
проекцию точки |
F |
на |
|
плос |
|
|
|||||||
кость |
ОХТ. |
Если |
F3 |
Е3, |
то |
|
|
||||||
Е е |
(ABCD), |
если |
F3 * |
£ |
то |
|
|
||||||
Ег(ABCD). |
|
|
|
|
|
|
|
|
|
|
|||
|
Для |
реализации |
этой |
идеи |
Рис. 3.40. Принадлежность точки |
||||||||
проведем |
через |
точку |
Е |
гипер |
|||||||||
гиперплоскости пространства £4 |
|||||||||||||
плоскость А, |
перпендикулярную |
||||||||||||
|
|
||||||||||||
84
плоскости OXY . Это можно сделать бесконечным числом способов. На рисунке 3.40 гиперплоскость Л(4) проведена через точку А . Пе ресечение ABCD и А будет плоскость, которую можно построить по трем точкам А, М, iV, где М е ВС, N е BD . Таким образом, полу чаем Аг = (A2M2N2), Аъ = (/i3M3JV3). Очевидно, что размерность по нижена до трех, и мы получили задачу на принадлежность точки E(E]tE2) плоскости A(A2M2N2>A3M3N3). Дальнейшее решение было описано выше.
На рисунке 3.40 Е3 * Е3, следовательно, Е е (ABCD).
Для решения задачи о принадлежности прямой и плоскости дан ной гиперплоскости необходимо описанный алгоритм повторить два и три раза, соответственно.
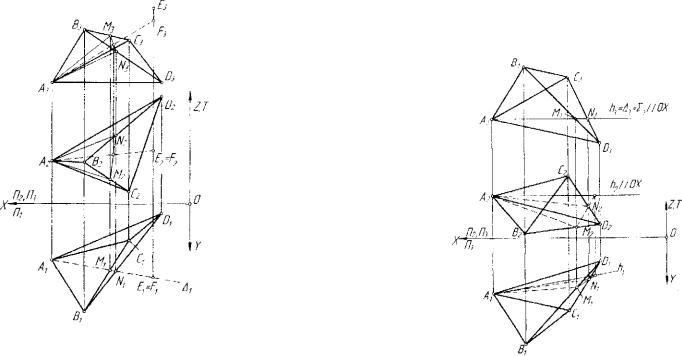
3.6.2. Прямые уровня и плоскости уровня
вданной гиперплоскости
Вданной гиперплоскости общего положения ABCD MOiyr быть выбраны прямые, параллельные какой-либо гиперплоскости ироек-
Рис. 3.41. Прямая уровня гиперплоскости относительно плоскости OXY пространства £4
85
ций, и прямые, параллельные какой-либо плоскости проекций. На ри сунке 3.41 изображена прямая h(h„k2,h3) данной гиперплоскости, параллельная плоскости OXY , а на рисунке 3.42 - прямая h(hx,h2,h3) данной гиперплоскости, параллельная гиперплоскости OXYZ .
Для проведения прямой hllOXY предварительно проведена ги перплоскость уровня S(Z3)II OXYZ . Строить другие проекции ги перплоскости 27 нет необходимости. В гиперплоскости 27 выбрана
плоскость |
уровня |
A(A3)IIOXYZ, |
проекции |
|
A2(A2M2N2) |
и |
||
AX(AXMXNX) |
строятся по |
точкам М и |
N, |
М GBD, |
N |
е CD |
. Гиперп |
|
лоскость 27 проведена через вершину |
А |
тетраэдра |
ABCD |
для |
эко |
|||
номии построений. Проекции h2 и hx |
прямой уровня h строятся по |
|||||||
условию принадлежности плоскости уровня А. При |
этом |
h3 II ОХ , |
||||||
h2 II OX |
,hxiOX. |
|
|
|
|
|
|
|
Построение прямой |
h, he (ABCD) |
и h II XYZ |
выполняется точно |
|||||
так же, как и в предыдущем случае. Однако теперь в плоскость A(AMN) можно выбрать любую прямую h(h2 # ОХ) и построить иро-
Рис. 3.42. Прямая уровня гиперплоскости относительно плоскости OXYZ пространства Е,
екцию Л, по принадлежности. Получаемая прямая h(huh2,h3) будет параллельна гиперплоскости OXYZ .
Если бы А, оказалась тоже параллельной оси ОХ, то это бы озна чало, что заданная гиперплоскость ABCD не является гиперплоско стью общего положения. В этом случае гиперплоскость ABCD была бы перпендикулярна гиперплоскости OYZT или, что, то же самое, была бы параллельна оси ОХ .
Очевидно, что в гиперплоскости ABCD общего положения нельзя найти и построить плоскость, параллельную какой-либо плос кости проекций.
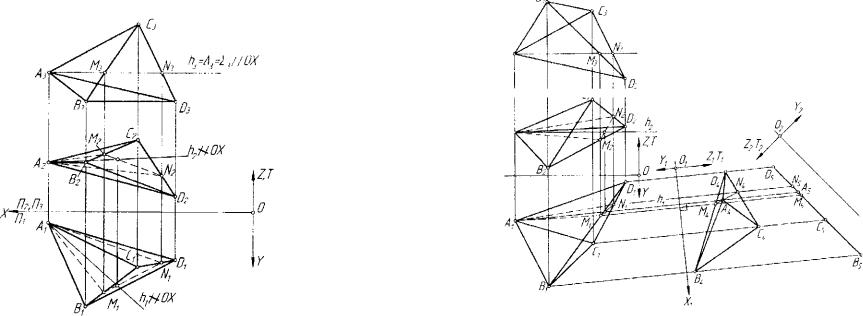
3.б.3. Преобразование гиперплоскости общего положения в проецирующую гиперплоскость и гиперплоскость уровня
Для преобразования данной гиперплоскости общего положения в гиперплоскость проецирующую относительно какой-либо гиперпло-
А_
А-/
х- П?,П3
\ \
*2
Рис. 3.43. Преобразование гиперплоскости общего положения пространства ЕА в проецирующую гиперплоскость
86 |
8 7 |
скости проекций необходимо в данной гиперплоскости построить прямую уровня. Н а рисунке 3.43 выбрана прямая уровня А ( А , , А , , А 3 ) ,
параллельная |
плоскости |
OXY . |
Новая |
гиперплоскость |
проекций |
|||
O A ' J Z J T , |
перпендикулярна прямой h, т.е. |
± А , . В новой системе |
||||||
проекций |
гиперплоскость |
ABCD |
является проецирующей относи |
|||||
тельно плоскости ОХ ХТХ. |
|
|
|
|
|
|||
Если |
задать ось |
о2Хг |
параллельно |
вырожденной |
проекции |
|||
А5В5С505, |
то |
в новой |
системе |
проекций |
o2X2Y2Z2T2 гиперплоскость |
|||
ABCD станет гиперплоскостью уровня относительно гиперплоскости
88
ГЛАВА 4. ВЗАИМНОЕ ПОЛОЖЕНИЕ ЛИНЕЙНЫХ ПОДПРОСТРАНСТВ
В пространстве Е3 прямая и плоскость, а также две плоскости, могут пересекаться, быть параллельными или перпендикулярными. Выполним на рассматриваемой графической модели решения пози ционных, аффинных и метрических задач для указанных пар геомет рических объектов.
4.1.Пересечение прямой и плоскости
Из аксиомы стереометрии [7]: «Если две точки прямой лежат в плоскости, то все точки прямой лежат в плоскости» следует, что прямая и плоскость могут пересекаться в точке - собственной или не собственной (бесконечно удаленной). В последнем случае прямая и плоскость являются параллельными, кроме того, исходя из формулы s = m + q-n размерности пространства пересечения (п. 1.7.2), также получаем пересечение прямой и плоскости пространства Е3 в точке, поскольку 5 = 2 + 1- 3 = 0.
Рассмотрим алгоритм конструктивного определения точки пере сечения прямой и плоскости. Пусть на чертеже (рис. 4.1) заданы
плоскость Ф(а// в) и не принадлежащая |
ей прямая |
с(сг,с2). Требует |
ся определить точку пересечения сГ)Ф. |
Отметим, |
что существуют |
различные решения данной задачи [23]. Наиболее простое графиче ское решение ее может быть выполнено на основе применения пары конкурирующих прямых, принадлежащих одной проецирующей
плоскости. Одной прямой |
этой |
пары служит заданная |
прямая |
с, а |
||
другой - прямая |
d с Ф. В этом случае определение искомой точки |
|||||
пересечения |
с[}Ф |
сводится к определению точки пересечения |
cf]d, |
|||
поскольку |
при |
с Ф |
имеет |
место тождественное |
равенство |
|
с(]Ф - cf]d. Алгоритм решения задачи может иметь нижеследующий вид.
1.c2=d2 (прямые с и d - фронтально-конкурирующие);
2. |
d2f)a2 |
= 1 2 , d2f]e2 = 2 2 ; |
3. 12 - И , е а , , 22 —>2Х е е , ; |
||
4. |
ri, =(lj,2]) - проекция dx прямой d определена проекциями |
|
l|,2j ее точек |
1 и 2; |
|
|
|
89 |